基于平面四连杆机构的垃圾桶桶盖开合设计
2019-08-16 04:11朱恩旭张磊周飞宇王磊唐政坤唐珊
科教导刊·电子版 2019年18期
朱恩旭 张磊 周飞宇 王磊 唐政坤 唐珊
摘要:针对智能垃圾桶桶盖自动开合的需求,基于平面四连杆机构中的曲柄搖杆机构,设计了能够满足动作需求的机械运动系统。所设计系统简单可靠,能够满足桶盖末端件的运动形式,提高了垃圾桶的自动化程度,为推动智能社区管理、垃圾分类提供了助力。
关键词 平面四连杆 曲柄摇杆 桶盖开合
0引言
近年随着我国经济社会的发展,城镇化进程不断加快,垃圾处理问题变得日益突出。据统计,我国城市生活垃圾清运量已从1979年的2508万吨增至2017年的20546.8万吨,并且还在以每年接近10%的强劲速度增长,每年因垃圾处理带来的经济损失高达300亿人民币。统计数字触目惊心!为了走出“垃圾围城”的困境,人们开始认真应对垃圾处理问题。进行垃圾分类是行之有效的处理途径之一,而智能化的垃圾桶则是进行垃圾分类的助推器。扔对垃圾,从垃圾桶设计开始。本文即是基于平面四连杆机构,提出一种可以电动开合桶盖的垃圾桶设计方案,为实施垃圾分类大数据管理、垃圾筒物联、智能社区管理奠定基础。
1桶盖开合原理设计
1.1设计要求
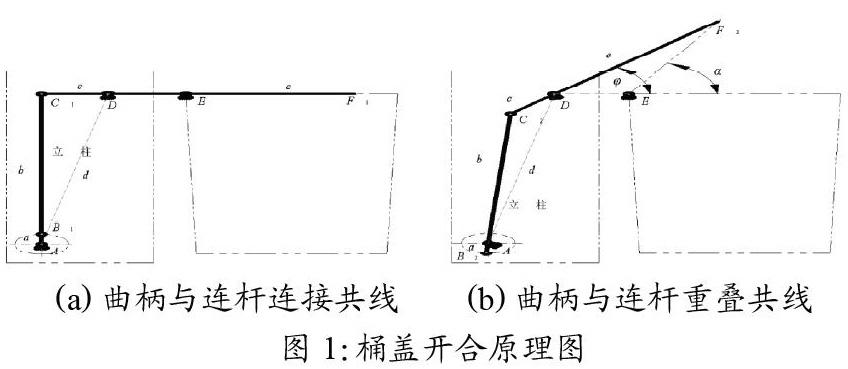
如图1中双点划线所示为市面通用的一种垃圾桶外形示意图。使用垃圾桶时,需要人力掀开垃圾桶的桶盖进行垃圾投掷。由于采用人力开启桶盖,不便于进行垃圾投掷者识别、垃圾投掷量称重等数据统计,且垃圾分类完全依靠人的主观自觉性,不便于进行提醒和监督。为推进智能社区管理,将垃圾桶设计为电动开合式,投掷垃圾流程为:垃圾投掷者采用外部触发(人脸识别、刷卡扫码等)打开垃圾桶进行垃圾投掷,控制器借此记录所有垃圾投掷信息并发送给控制中心。此过程中,要求垃圾桶在接收到有效触发指令后,桶盖打开 角;垃圾投掷完毕后,桶盖关闭 角。因此,开合角度 为基本设计参数。
1.2基于平面四连杆机构的开合设计
欲使桶盖开合 角,首先考虑将 视为四连杆机构摆杆的摆角。然而,由于垃圾桶经常要被拖运和倾倒垃圾,故不宜直接将桶盖作为摆杆;因此图1中E点所在的铰链转动副不能作为四连杆的机架, 角也不能作为摆杆摆角。基于这种考虑,四连杆驱动的开合机构需要独立垃圾桶存在。考虑在垃圾桶后设置立柱用于安置四连杆机构,如图1所示。
由于桶盖合上的情形,即水平位置是桶盖的一个极限位置,故将此位置作为摆杆的极限位置,在F1E的延长线上设计一转动铰链副D;D铰链安装在立柱(机架)上,如图1(a)所示。C1点的确定要考虑立柱的尺寸,DC1杆为四连杆摆杆初始设计长度,记为c。考虑桶盖的另一极限位置,即将桶盖打开 角,采用作图法,作出如图1(b)所示图形。此极限位置与桶盖水平极限位置所夹角 满足设计要求 角, 角为所设计四连杆机构摆角。
由图1(a)和图1(b),摆杆的极限位置已经确定。由四连杆机构运行规律,所设计四连杆机构是一曲柄摇杆机构,摆杆的极限位置分别出现在曲柄和连杆拉直共线和重叠共线的位置。由作图法可以确定A点和B1、B2点位置,如图1(a) 和1(b)所示。此时,各杆件尺寸应满足四连杆的杆长和条件:即最短杆与最长杆之和不大于其它两构件长度之和。为了保证A铰链副为整转副,a设计为最短杆。
以上即完成了基于平面四连杆机构的垃圾桶桶盖开合设计。考虑DF2长,即e为一定长,桶盖在开合过程中,F点要沿桶盖在F1F2区间滑动,故F点应设计为滑动副。
2结语
平面四连杆机构可实现末端件的多种运动形式和运动规律,具有运动副单位面积受压小、便于润滑,设计过程简洁等优点,因此在机械设计上得到了广泛应用。本文所进行的垃圾桶桶盖开合运动设计就是基于平面四连杆机构中的曲柄摇杆机构完成的,设计简洁实用,可以在垃圾分类、智能社区管理中推广使用。
基金项目:大学生实践创新训练计划项目(项目编号:xcx2018108)。
作者简介:朱恩旭(1997.4-)男,汉族,江苏连云港人,在读本科生;通讯作者:张磊(1978.12-)男,汉族,江苏徐州人,博士,副教授,研究方向:精密机械质量控制。
参考文献
[1] 吴越.扔对垃圾,从垃圾桶设计开始[N].解放日报,2019-04-01(009).
[2] 周克春.常州市区生活垃圾分类治理问题研究[D].南京:南京理工大学,2018.