
医科达Synergy医用直线加速器控制软件的工作原理与实际应用
2019-08-20 01:57杨晋张灿陈龙江海
中国医疗设备 2019年8期
杨晋,张灿,陈龙,江海
海军安庆医院 放射治疗技术部,安徽 安庆 246001
引言
医科达Synergy医用直线加速器(以下称医科达加速器)为数字化医用加速器,其具有快速治疗、自动摆位、调强治疗、影像验证等功能,可开展常规放疗、适形放疗、静态和动态调强放疗、图像引导调强放疗等,广泛应用于全身各个部位的恶性肿瘤放射治疗[1-2]。
医科达加速器之所以称得上数字化,是因为其控制软件包含七百多个Item,用于实时监测和控制各子系统的运行参数和状态;操作者可以通过控制软件里相关的Item 查看机器参数或输入用户指令;当机器出现故障时,控制软件会根据实时监测的信息自动诊断故障,并在显示器上显示错误代码和故障信息。
1 控制系统简介
医科达加速器的控制系统主要由控制柜和三个控制区组成,控制柜与控制区之间通过两根1553 串行线连接并通讯[3]。控制柜里包含两台工业计算机:显示处理器和控制处理器。图1 所示为医科达加速器控制系统结构示意图。
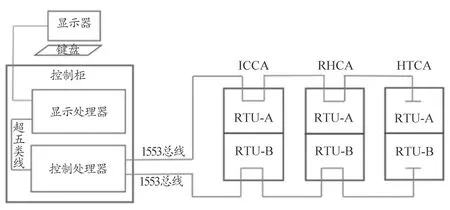
图1 医科达加速器控制系统结构示意图
显示处理器里运行Integrity 应用程序,为操作者提供图形用户界面(Graphical User Interface,GUI),同时显示处理器连接键盘、鼠标和显示器。因此,操作者不仅可以通过显示处理器的显示器查看机器参数和故障报错,还能通过显示处理器的鼠标和键盘输入用户指令、修改校准参数。显示处理器和控制处理器通过超五类网线(CAT-5e)通讯。
控制处理器里运行加速器控制软件。显示处理器获得用户指令后,通过超五类网线将用户指令传输给控制处理器,控制处理器对用户指令作一系列处理后,输出相关控制指令到各控制区,相应的控制区将接收到的控制指令转换成模拟信号或TTL 电平信号,并分配到相应的子系统,控制相应子系统的运行;控制处理器通过接收从各个控制区反馈来的各子系统的运行状态信息(12 位数值的数字信号或TTL 数字信号),实时监测各子系统的运行状态和参数,同时,控制处理器通过超五类线将监测到的信息传输给显示处理器,因此操作者可以通过显示处理器查看机器的运行状态和参数。
每个控制区由两个独立工作的终端组成,RTU-A 和RTU-B(RTU:Remote Terminal Unit),每个RTU 终端含有一组印刷电路板(PCB),用于接收和传输来自控制处理器和子系统的模拟信号和数字信号。控制区的RTU 终端与控制处理器之间通过1553 总线串行连接,其作用是将来自于控制处理器的控制指令(数字信号)转换成模拟信号或TTL电平信号,并分配到相应的子系统,控制各子系统的运行;将从子系统反馈回来的模拟信号转换成12 位的数字信号,并传送到控制处理器,告诉控制软件机器的运行状态和参数[4]。表1 所示为医科达加速器三个控制区的名称和位置。
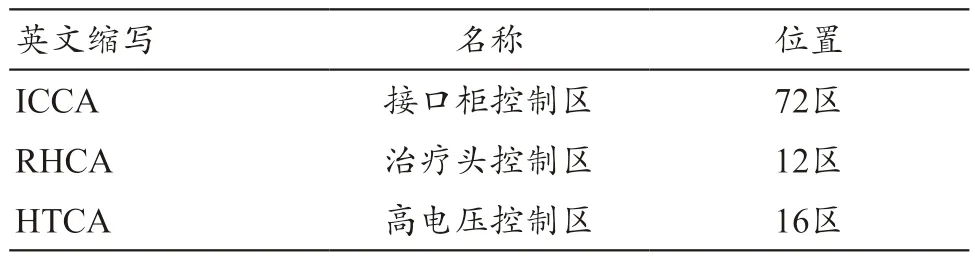
表1 医科达加速器控制区名称和位置
2 控制软件的Item和Part
2.1 控制软件的Item
控制处理器的控制软件里有七百多个Item。每个Item拥有一个唯一的数字编号和名称,可被视为控制软件里的一个子程序,用于实时监测和控制机器上某个硬件的运行状态和参数。这些被实时监测和控制的硬件为各个子系统的继电器、传感器、开关、电位器、电源等,每个硬件有一个或多个Item 与之对应。比如Item229(高功率移相器位置)就是通过电位器反馈来的电压值,来监测高功率移相器的位置信息。Item223(内循环水温度)就是通过水温传感器反馈来的电压值,来监测内循环水的温度[5]。
控制软件里的Item 分为三类:① 接收类Item,用于实时接收被监测的硬件信息;② 控制类Item,用于比较实际(监测到的)的有效值和设定的有效值,并输出比较的差值到传递类Item;③ 传递类Item,用于传递控制指令到控制区的RTU 终端,从而驱动相应子系统运行。
2.2 控制软件的Part
控制软件里每个Item 包含有很多的Part,Part 可视作Item 的各项参数,用于接收、运算、传输Item 的各种信息。控制软件里每个Part 都有一个编号和名称,在不同的Item里,具有相同编号的Part 含义相同,但是取值不一样。图2所示为部分常用的Part。操作者可以在维修模式(Service Mode)里,选择Display Machine Item 命令后,输入Item编号来查看相关Item 的所有Part 及其取值[6]。
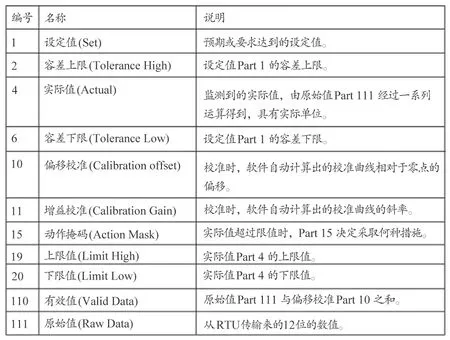
图2 部分常用的项目成分
2.3 接收类Item的工作原理
图3 所示为接收类Item 的原理图。被监测硬件(如电位器、继电器、传感器等)输出的模拟信号首先被传输到相应控制区RTU 内的AI-12(模拟信号输入-12 位数值输出)电路板。AI-12 电路板将接收到的模拟信号转换为12 位数值的数字信号后,通过1553 串行线将数字信号传输给控制软件里相应的接收类Item。
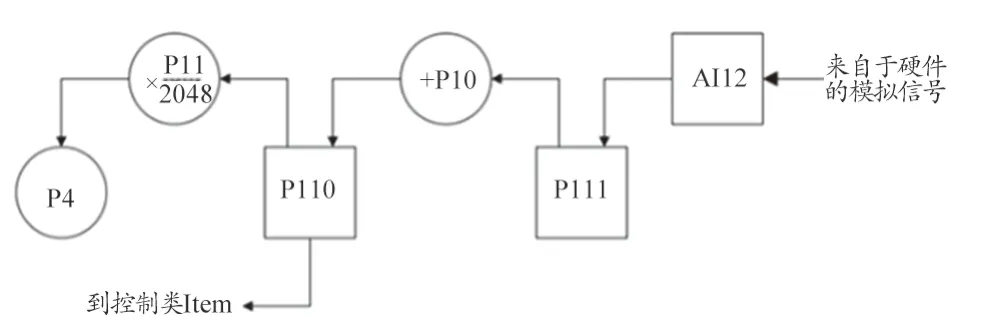
图3 接收类Item的原理图
接受类Item 里Part111(原始值)接收来自AI-12 电路板的12 位数值,称之为原始值。然而,Part111(原始值)的12 位数值没有量纲,需要对其进行一系列的运算处理,转换为操作者可以理解的采用SI 国际单位制的数值。在接收类Item 里,Part111(原始值)首先与Part10(偏移校准)相加生成Part 110(有效值)。Part110(有效值)有两路输出,一路输出到相应的控制类Item,以作进一步的运算处理;另一路则乘以Part11(增益校准)并除以比例系数2048 后,生成Part4(实际值)。Part4 为采用SI 国际单位制的数值,代表的是被监测的硬件运行参数或状态信息。操作者可以在维修模式(service mode)查看相关Item 的Part4 的值,从而知道机器的运行参数或状态,如运动部件的位置信息[7]、电流、电压、水温等。
2.4 控制类Item的工作原理
图4 所示为控制类Item 的原理图。接收类Item 输出的P110 被相应的控制类Item 的Part110 接收后,被传输到数值比较器。同时,数值比较器会接收P112(设定的有效值),并比较Part110(实际的有效值)与Part112(设定的有效值)的数值后,输出比较的差值到相应的传递类Item。
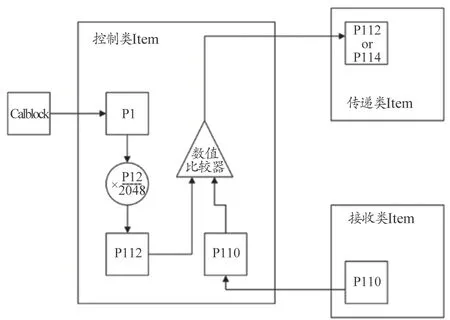
图4 控制类Item的原理图
Part112 来自控制软件里的校准参数数据库CalBlock。每次做完校准并保存后,CalBlock 数据库会自动更新并保存校准参数。操作者每次通过显示处理器输入出束指令(如能量、剂量率等)并点击确认后[8],相关控制类Item 的Part1(设定值)会自动读取数据库CalBlock 里与之相对应的设定值。Part1 的值采用的是SI 国际单位制,需要乘以Part12(反比增益校准)并除以比例系数2048,转换成Part112。
2.5 传递类Item的工作原理
图5 所示为传递类Item 的原理图。传递类Item 的Part112 或Part114 接收从控制类Item 传输来的数值,Part112 用于运动系统,如机架运动[9];Part114 用于伺服系统,如磁控管灯丝电源。因Part112 或Part114 的均为有效值形式,需要先减去Part10(偏移校准),转换成8 位或12 位的原始值形式后,再传输到相应控制区RTU 终端的AO-8 或AO-12(8 位或12 位数值输入-模拟信号输出)电路板,AO-8 电路板用于驱动运动系统,AO-12 具有更高的精度,用于驱动伺服系统。AO8 或AO12 电路板把输入的数值转换成模拟信号,然后驱动相应的子系统运行到设定的状态。值得注意的是,输入到AO8 或AO12 电路板的数值必须在限值范围内,否则Part15(动作掩码)就会采取措施,让机器或相应的子系统停止运行并报错。
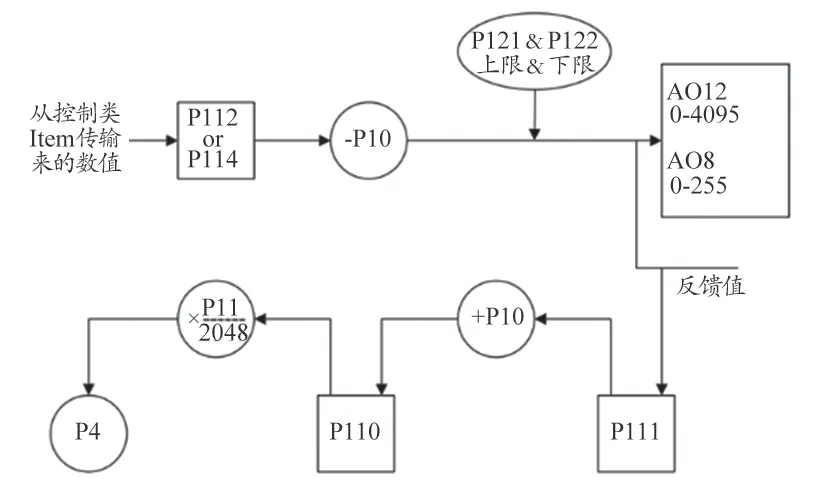
图5 传递类Item的原理图
输入到AO-8 或AO-12 电路板的数值也会以反馈值的形式传输到该传递类Item 的Part111(原始值)里,然后经过一系列运算转换为Part4(实际值)。传递类Item 里Part4的值为比较差值的实际值,也采用SI 国际单位制,但与接收类Item 的Part4 意义不同。
3 控制软件Item和Part的实际应用
本节将通过分析Item 和Part 在高功率移相器(HP Phase Shifter)运行过程中的实际应用,来具体说明控制软件的工作原理。
图6 为医科达加速器高功率移相器的结构图。高功率移相器由两个矩形波导并联而成,每个矩形波导里有一个短路活塞,活塞受电机驱动。高功率移相器的输入端接收来自加速管末端的剩余微波功率,通过控制软件控制电机运动,改变活塞位置,从而改变输入的微波功率的相位,并最终将微波功率输出到加速管的输入端。高功率移相器的作用是通过调节短路活塞的位置,使其输出的微波功率的相位与加速管输入端来自磁控管的微波功率相位相同,从而可以回收利用加速管的剩余微波功率,提高微波功率的利用效率和加速管内的微波能量[10-11]。
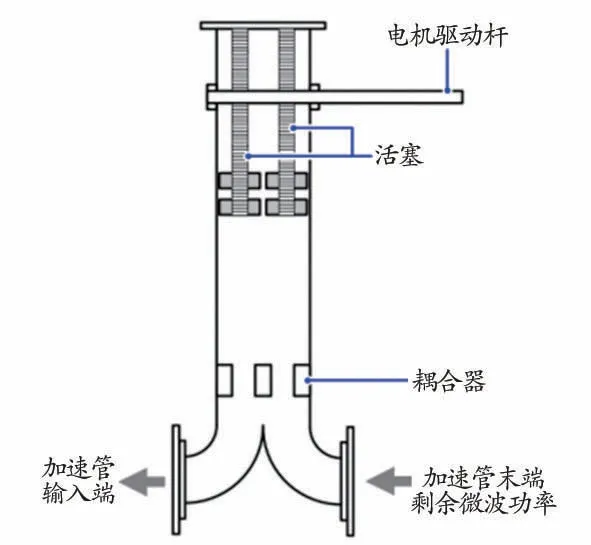
图6 高功率移相器(HP Phase Shifter)结构图
图7 所示为医科达加速器高功率移相器的工作原理图[12]。控制软件通过实时监测和控制电机及活塞运动,实时控制从高功率移相器输出的微波功率相位。图6 中的电位器位于高功率移相器运动装置上,与电机齿轮啮合,输出电压与活塞位置成线性关系,电压值为0~10 V。电位器的输出电压首先被传送到高压控制区的AI-12 电路板上,AI-12 电路板上的A/D(模/数)转换器将输入的电压值转换位12 位数值,并将该12 位数值传输到控制软件里接收类的Item229(高功率移相器位置)。Item229 的Part111 接收来自AI-12 电路板的12 位数值,即原始值,该原始值即为控制软件接收到的高功率移相器实时的位置信息。在Item229 里,Part111 的12 位数值被转换为Part110(有效值)和Part4(实际值)。Part4 的数值采用SI 国际单位制(厘米),操作者可以根据Part4 的值得知高功率移相器的实际位置。Part110 会被传输到控制类的Item162(高功率移相器控制),作进一步的运算处理。
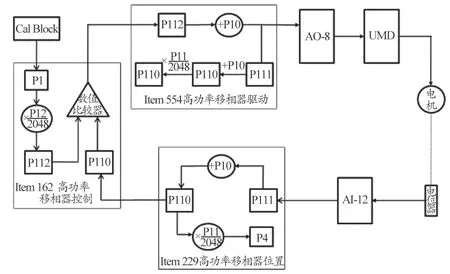
图7 高功率移相器工作原理图
Item554 的Part112 接收从Item162 传输来的比较差值,在将接收到的比较差值减去Part10(偏移校准)后传输给AO-8 电路板,AO-8 电路板上的D/A(数字/模拟)转换器会将接收的数值转换为直流电压模拟信号,该直流电压模拟信号即驱动电机运动的速度信号,其幅值在-5 V~+5 V之间,电压值的大小代表了电机速度的快慢,电压的极性代表了电机运动方向。为了便于操作者观察,Item554 输出给AO-8 电路板的数值会被反馈到P111,并最终被转换为Part4(实际值),Part4 的值采用国际单位制(厘米),因此操作者可以通过查看Item554 里Part4 的值得知高功率移相器的实际位置与设定位置的位置差值。
AO-8 电路板输出直流电压模拟信号(驱动电机运动的速度信号)给电机驱动区的UMD(直流电机驱动)电路板。UMD 电路板将接收到的直流电压模拟信号转换为幅值为±26 V 脉冲电压信号,用于驱动电机运动。该脉冲电压信号具有固定的频率,其极性代表了电机的运动方向,脉宽代表了驱动速度,脉宽越宽,电机驱动速度越大,脉宽越窄,电机驱动速度越小。
在电机驱动活塞运动的同时,与电机啮合的电位器实时监测活塞位置,并将监测值反馈到接收类的Item229,控制类的Item162 会实时比较设定值与监测值,并将比较差值输出到传递类的Item554,用于驱动运动机构运动,直至活塞运动到设定位置后,Item162 输出的比较差值为0,0代表无驱动指令,此时电机停止运动。
4 总结
综上所述,医科达加速器的控制软件通过三类Item 实时监测和控制各子系统的参数和运行状态。本文中控制软件的工作原理和分析方法也适用于医科达加速器其他各子系统的运行控制。操作者可以通过控制软件的相关Item 输入用户指令,修改校准参数,查看机器参数和状态。
操作者尤其是维修工程师和物理师在维修和校准机器时[14],常常需要用到很多相关的Item,因此熟练掌握控制软件的工作原理,熟悉控制软件里各类Item 和Part 用途,能有助于操作者在工作中快速准确的通过控制软件查看设备信息(如机器参数、运行状态、故障信息等)[15],诊断问题,解决故障,并避免操作错误[16]。
猜你喜欢
遗传(2022年9期)2022-10-10
汽车实用技术(2022年7期)2022-04-20
课程教育研究(2021年24期)2021-04-14
文化创新比较研究(2020年8期)2021-01-22
海洋通报(2020年5期)2021-01-14
现代企业文化·理论版(2020年16期)2020-08-31
电子制作(2019年7期)2019-04-25
求知导刊(2018年20期)2018-10-19
视野(2017年3期)2017-02-15
电子制作(2017年24期)2017-02-02
