一种用于遥测数据可视化的合成坐标变换方法*
2019-09-03 07:22王玮
计算机与数字工程 2019年8期
王 玮
(91550部队 大连 116023)
1 引言
飞行器飞行试验是由国家靶场组织实施,用以考核评定飞行器战术、技术指标的权威方式[1]。飞行器飞行试验遥测数据[2~3],是指遥测系统在试验中获取的如时序、控制、动力、力学环境等飞行器相关参数[4],是评定飞行器各项性能指标的重要数据依据[5~6]。
传统的遥测数据可视化方式,是基于传感器测量数据的“时间-测量值”二维曲线[7~8],如“时间-压力”曲线[9]。该方式的主要缺点是关联信息匮乏[10],仅仅显示了传感器测量值,没能显示该传感器所处的飞行器部位,更无法同步反映该采样时刻飞行器的空间姿态。而很多性能指标的评定,需要综合分析上述数据才能得以进行[11],数据之间的关联性尤为重要,需要从可视化的角度,对上述数据进行可视关联[12]。
此类可视关联的难点在于,可视化的图形绘制,必须依赖于一定的坐标系统,而飞行器飞行试验的遥测数据、位姿数据定义在各自的坐标系下,其坐标系原点、轴向、数值范围都有巨大差异。只有在坐标系统层次完成一定程度的数据一致性构建,才能进一步实现多源数据的可视关联。
为此,本文提出了一种用于飞行器飞行试验遥测数据可视化的多源数据合成坐标变换方法,该方法针对遥测数据、位姿数据的可视关联问题,提出了“飞行器体发射坐标系”的概念及坐标变换算法,以之为核心构建了方法的技术流程,在显示飞行器位姿的同时,将遥测数据映射到对应传感器在飞行器上的安装部位,进而实现遥测数据与飞行器空间位姿数据的可视关联。
2 遥测数据可视化相关坐标系简介
本文提出的遥测数据可视化,涉及三个坐标系统,即传感器坐标系、发射坐标系、飞行器体坐标系。
2.1 传感器坐标系
这里的传感器,主要指遥测环境数据,即温度、压力、振动等数据对应的测量传感器。此类传感器坐标系为一维向量坐标系,坐标原点为传感器与飞行器表面的触点,以触点所在飞行器表面法线方向为正方向。
2.2 发射坐标系
发射坐标系|O-XYZ|,其定义如下[13]:
原点O为发射台中心在发射位的地面投影点;
OX轴位于过原点O的水平面内,由原点O指向导弹射击瞄准方向(从天文北向东转过的角度);
OY轴取过坐标系原点O的铅垂线,向上为正;
OZ轴位于过坐标系原点的水平面内,与OX轴OY轴构成右手直角坐标系。
2.3 飞行器体坐标系
飞行器体坐标系|O1-X1Y1Z1|固连在飞行器结构体上,随飞行器运动,其定义如下[14~15]:
原点O1为飞行器制导系统的平台中心;
O1X1轴位于飞行器体纵轴,指向飞行器尖顶;
O1Y1轴位于飞行器纵对称面内,指向Ⅲ象限;
O1Z1轴与O1X1轴O1Y1轴构成右手直角坐标系。
3 支持遥测数据可视化的多源信息合成坐标变换方法
3.1 方法概述
支持遥测数据可视化的多源信息合成坐标变换方法,技术流程如图1所示。核心是综合处理遥测数据、姿态数据、位置数据,通过坐标变换技术,在显示飞行器姿态、位置的同时,将遥测数据映射到对应传感器在飞行器上的安装部位,实现了遥测数据与飞行器空间位置、姿态数据三类数据的可视关联。
遥测数据经由所在的传感器坐标系,通过坐标转换a算式,转换到飞行器体坐标系,由于传感器测量值是一维向量,仅需要传感器触点在飞行器体坐标系下的坐标,即可完成转换,这里不再介绍。而发射坐标系与飞行器体坐标系,坐标系定义和实际数值范围都有巨大的差距,在可视技术上,很难统一到某个坐标系下,即如果显示发射系坐标轴,飞行器将近似于一个点,无法观察飞行器姿态;如果显示飞行器姿态,将无法显示发射系坐标轴,也就无法描述飞行器的位置信息。为此,该方法综合发射坐标系、发射惯性系与飞行器体坐标系三大坐标系特点,提出了“飞行器体发射坐标系”的概念,给出了坐标转换b算式(图1),将已转换到飞行器体坐标系的遥测数据,通过姿态数据,转换到飞行器体发射坐标系,实现遥测数据与飞行器姿态的组合映射,最后利用飞行器体发射坐标系和发射坐标系之间的坐标轴平行关系,实现可视关联。

图1 方法的技术流程
3.2 飞行器体发射坐标系
飞行器体发射坐标系|O2-X2Y2Z2|(图2)固连在飞行器结构体上,随飞行器运动,其定义如下:
原点O2为飞行器制导系统的平台中心;
O2X2轴由原点指向发射时刻的射击瞄准方向;
O2Y2轴取过发射坐标系原点的铅垂线反向,向上为正;
O2Z2轴过发射坐标系原点的水平面,与O2X2轴O2Y2轴构成右手直角坐标系。

图2 飞行器体发射坐标系
飞行器体发射坐标系|O2-X2Y2Z2|,与发射坐标系|O-XYZ|,飞行器体坐标系|O1-X1Y1Z1|,三者之间的关系,如图3所示。
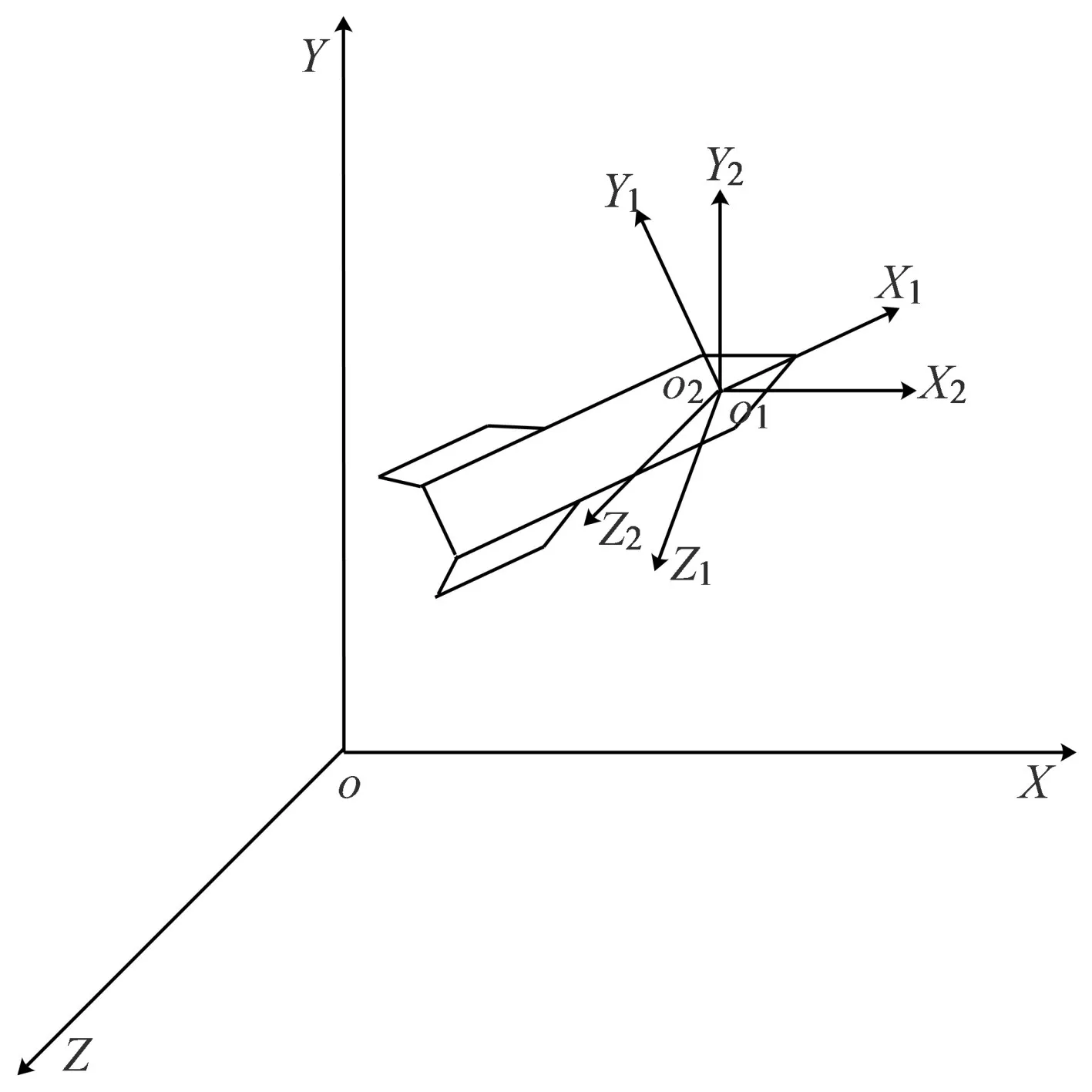
图3 三种坐标系统空间关系
3.3 飞行器体坐标系到体发射坐标系转换算式
4 仿真实验
本文采用仿真实验验证该方法的有效性,仿真数据包括一组某型飞行器遥测瞬时冲击数据,该传感器触点在飞行器体坐标系上的安装位置;飞行器对应传感器采样时刻的姿态数据,包括俯仰、偏航、滚动三个姿态角。取t1、t2两个时刻的两组数据,如表1所示。

表1 采样时刻数据表
将冲击数据在传感器坐标系的测量值,转换为向量值,以箭头长度表示瞬时冲击数值,以箭头方向表示测量传感器坐标系的方向。通过a算式,将遥测冲击数据的数值和方向,变换到飞行器体坐标系下;再通过b算式,结合三个仿真姿态角数据,变换到飞行器体发射坐标系下,最终结果如图4、图5所示(黑色箭头为遥测冲击数据)。
实验结果显示,方法实现了遥测数据在飞行器安装位置上的可视化,可视结果随飞行器位姿变化而同步变化,即实现了遥测数据与飞行器空间位姿数据的可视关联。

图4 t1时刻遥测数据与空间位姿可视关联
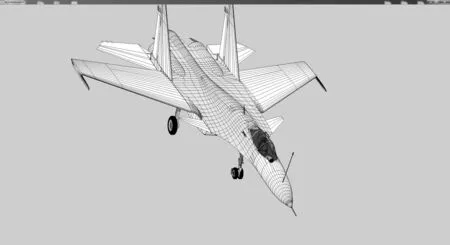
图5 t2时刻遥测数据与空间位姿可视关联
5 结语
本文提出了一种用于飞行器飞行试验遥测数据可视化的多源数据合成坐标变换方法,该方法提出了飞行器体发射坐标系的概念及相应坐标变换算式,通过坐标变换技术,在显示飞行器姿态、位置的同时,将遥测数据映射到对应传感器在飞行器上的安装部位,实现了遥测数据与飞行器空间位置、姿态数据三类数据的可视关联。
仿真实验表明,该方法支持的数据可视化,相比传统的二维曲线方式,能显著提升遥测数据可视化的信息综合程度,全面反映指标评估的关注数据,支持试验结果分析评估工作的深入开展。
猜你喜欢
中国科技纵横(2020年13期)2020-12-11
房地产导刊(2020年8期)2020-09-11
语数外学习·初中版(2020年2期)2020-09-10
现代信息科技(2020年22期)2020-06-24
计算机测量与控制(2020年3期)2020-04-07
民用飞机设计与研究(2019年2期)2019-08-05
民用飞机设计与研究(2019年2期)2019-08-05
民用飞机设计与研究(2019年2期)2019-08-05
山东工业技术(2019年16期)2019-07-19
科技与创新(2018年12期)2018-06-22