
基于灰色理论的全地形越野车液压系统设计
2019-09-09 13:33杨金沅周燕李沛梁博邹翔
数码世界 2019年6期
杨金沅 周燕 李沛 梁博 邹翔
摘要:如今越野车的悬架都是依靠传感器的实时识别并控制车身做出相应的动作,本文通过灰色预测模型对全地形越野车在行驶过程中液压系统在不同地形的一个状态进行预测,能让越野车准确识别地形状况,并根据该模型得出设计出一款能实时调节车身状况的液压系统,让整车在运行中保持稳定。
关键词:全地形越野车灰色预测液压互联
前言
法国公司Mecanroc曾设计出一款Swincar E-Spider全地形电动越野车,该车的悬挂系统主要依靠一个固定的阻尼器来实现减震作用,配合其悬挂结构,有较好的避障和越野功能。
本文在其悬架机构基础之上,以灰色模型为理论基础,通过设计一可实现自动调节的液压系统,再以Swincar E-Spider的悬架系统为基础,能大幅提升车身在运行过程中的稳定性。
1.灰色预测GM(1,1)模型
灰色预测模型针对“部分信息已知,部分信息未知”的不确定性,以小样本来对整个系统进行预测分析。通常对原始的数据进行累加或者累减的操作来弱化原始时间序列的不确定性,而最常用的就是GM(1,1)模型,而对于单一变量的液压杆数据来讲,我们采用GM(1,1)来进行处理。
我们假设样本原始数据序列为
,该数据序列为样本液压杆的原始数据,而对于一般的离散型的数列而言都具有一定的随机性,为了弱化原始数据序列的随机性,则需要在灰色模型建立之前就要进行等加或者等减的操作来弱化原始数据序列的随机性。
通过一次累加可以得到一个新的序列x(1)K={x①(K)=l,2,3,AA,n},其中x(1) (k)=∑x(0)(i),k=l,2,3,AA,n;在经过累加累减处理之后,可以将该变化趋势近似用微分方程来表示:
在该微分方程中,a、u为辨识参数,可以用最小二乘法求取确定:
其中:
求出参数a和n后,就可以通过带人得到上述微分方程的解:
之后再进行对数据的还原,得到所需要预测的液压杆运动状态的值。然后再进行精度检验、残差分析后,对满足检测要求的数据将其导入到计算机中,在传输到越野车的液压系统的各个控制部分,来调整液压泵的运动,从而调整越野车在不同路况下的运行状态。
2.越野车液压系统设计
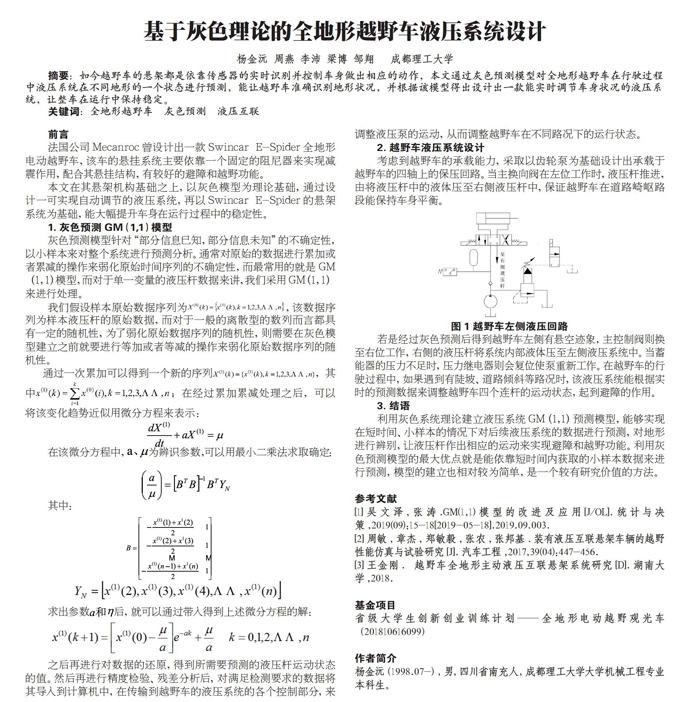
考虑到越野车的承载能力,采取以齿轮泵为基础设计出承载于越野车的四轴上的保压回路。当主换向阀在左位工作时,液压杆推进,由将液压杆中的液体压至右侧液压杆中,保证越野车在道路崎岖路段能保持车身平衡。
若是经过灰色预测后得到越野车左侧有悬空迹象,主控制阀则换至右位工作,右侧的液压杆将系统内部液体压至左侧液压系統中。当蓄能器的压力不足时,压力继电器则会复位使泵重新工作。在越野车的行驶过程中,如果遇到有陡坡、道路倾斜等路况时,该液压系统能根据实时的预测数据来调整越野车四个连杆的运动状态,起到避障的作用。
3.结语
利用灰色系统理论建立液压系统GM(1,1)预测模型,能够实现在短时间、小样本的情况下对后续液压系统的数据进行预测,对地形进行辨别,让液压杆作出相应的运动来实现避障和越野功能。利用灰色预测模型的最大优点就是能依靠短时间内获取的小样本数据来进行预测,模型的建立也相对较为简单,是一个较有研究价值的方法。
参考文献
[1]吴文泽,张涛.GM( 1,l)模型的改进及应用J/OL],统计与决策,2019(09):15-18[2019-05-18].2019.09.003.
[2]周敏,章杰,郑敏毅,张农,张邦基,装有液压互联悬架车辆的越野性能仿真与试验研究[J],汽车工程,2017,39(04):447 456.
[3]王金刚.越野车全地形主动液压互联悬架系统研究[D].湖南大学,2018.
猜你喜欢
时代汽车(2021年1期)2021-03-03
阅读(科学探秘)(2020年3期)2020-05-29
小学阅读指南·高年级版(2020年3期)2020-04-01
时代汽车(2020年20期)2020-03-02
大陆桥视野·下(2017年12期)2017-11-29
科技创新与应用(2017年17期)2017-06-16
教学月刊·中学版(教学参考)(2016年5期)2016-06-14
大众科学(2015年1期)2015-09-10
