
基于模糊控制理论的智能体运动控制方法
2019-09-10 04:22陈杰程胜徐梦
航空科学技术 2019年2期
关键词:模糊控制
陈杰 程胜 徐梦





摘要:模糊控制是相对于传统自动控制领域精确控制而言的一种非线性的系统智能控制方法,模糊控制通过对观测量进行模糊化,建立模糊控制规则以及模糊推理三个步骤实现模糊模控制。结合智能算法进行智能体的控制方法的研究一直是国内外学者热切关注的问题,本文针对智能体的追踪问题提出了一种使用模糊控制的方法进行目标的追踪。试验结果证明,本文提出的方法能够有效地实现智能体的目标追踪。
关键词:模糊控制;模糊推理;智能体;追踪
中图分类号:TP13 文献标识码:A
在经典的控制领域里,控制系统的优劣的最重要的评价标准是控制系统动态模式是否精确或是控制精度的高低,系统的动态控制信息越详细,就越能使控制更加精确。通常地,对于复杂的系统,由于变量太多,难以精确地描述动态系统,于是工程师便利用各种方法来简化系统动态,以达成控制的目的,但却不尽理想。换言之,传统的控制理论对于明确系统有强而有力的控制能力,但对于过于复杂或难以精确描述的系统,则显得无能为力,因此就会使用模糊控制的方法进行智能体的控制[1,2]。智能体的决策与控制在军事、生活、生产领域应用广泛,如在多机器人协同运动、无人机编队飞行等[3~8]。
参考文献[9]采用了一种变论域自适应模糊控制的方法实现了四级倒立摆的仿真控制试验,并且通过试验验证了该方法不仅可以使得倒立摆小车行走到指定的位置还具有良好的稳定性与鲁棒性。参考文献[10]使用了一种基于遗传算法自动寻优隶属度函数参数和模糊控制规则的水下机器人模糊控制器的智能控制方法,最后通过仿真试验验证了所提出的方法相比传统的模糊控制方法具有相应快、超调小的特点。参考文献[11]以移动机器人导航问题为研究背景,提出了一种基于强化学习的机器人模糊逻辑控制器,解决了移动机器人在未知环境下的导航问题,同时该控制器在未知环境下具有较强的适应性。
本文针对智能体的二维平面控制方法进行研究,传统的自动化控制方法需要构建精准的控制模型,但是构建模型往往需要投人较多的时间和成本,因此,本文提出了一种基于模糊理论的智能体控制方法,并在追踪场景中进行了验证。根据模糊控制的相关原理,首先定义一组观测量,然后对观测量进行模糊化,并将观测量输入到模糊控制器中。模糊控制器得到输出值经过一种基于加权平均法的模糊决策方法计算得到了最终的决策量,进而控制智能体的合理运动。
1 模糊控制与智能体平面运动算法
1.1 模糊控制
对于一些具體的工程应用问题,有些难以使用精确控制的方法进行控制,因此通常使用模糊控制的方法进行控制。模糊控制器[4]包括以下4部分。
(1)模糊化
主要作用是选定模糊控制器的输入量,并将其转换为系统可识别的模糊量,具体包含以下三步:第一,对输入量进行满足模糊控制需求的处理;第二,对输入量进行尺度变换;第三,确定各输入量的模糊语言取值和相应的隶属度函数。
(2)规则库
根据人类专家的经验建立模糊规则库。模糊规则库包含众多控制规则,是从实际控制经验过渡到模糊控制器的关键步骤。
(3)模糊推理
主要实现基于知识的推理决策[5]。
俨)解模糊
主要作用是将推理得到的控制量转化为控制输出。
1.2 智能体的平面运动控制算法
如图1所示,被追踪智能体(红球)在平面内做匀速圆周运动,运动半径为0.15,运动轨迹与x轴与y轴相切,智能体的初始位置是(0.3,0)。基本原理如下。
在任意时刻,智能体的坐标使用参数方程表示为:
x=R+Rcosθ
y=R十Rsinθ
代码实现:
Alphas=PI/50;//运动角度,调节可以控制速度
cs=cos(alphas);//cos
ss=sin(alphas);//sin
x0=0.15+radiums*cs; //radiums为半径
y0=0.15+radiums*ss;//获得位置坐标
SetBalllPos(x0,y0);//发布位置信息
SetBalllPos(x0,y0)函数在ShareSection.h中注册与实现
FUZZY_EXPORT_API void SetBalllPOS(double x,double y);
void SetBa111Pos(doublex,doubley)
{
BaIIO_x=x;
Ba110_y=y;
}
对于物理运动来说,运动有合成和分解的性质[6],针对要分别控制x轴和y轴上的加速度,所以本文对于整个运动的控制也分为x方向和y方向。以下的叙述说明中,本文将以x轴为主导'y轴同理。
2 模糊化
2.1 定义观测量和控制量
在两个智能体之间,我们定义两个观测量,分别是两智能体的相对位置distance和相对速度speed(相对位置的变化量)。本文中的相对的意义是追击智能体减去被追击智能体的相对量。定义控制量为控制第二个智能体在x方向上的加速度。
2.2 模糊化
2.2.1 观测量1
两智能体的相对位置distance x表示:
定义相对位置以在x轴上的相对位置为例,y轴上相同,观测量为正大(PBd)、正小(PSd)、零(Zd)、负小(NSd)、负t(NBd)这5个元素组成的模糊集合,其中:
x={-0.3,-0.2,-0.1,0,0.1,0.2,0.3}
隶属函数见表1。
2.2.2 观测量2
相对速度speed∈Y表示:
定义相对速度以在x轴上的相对速度为例}Y轴上相同,观测量为正大(PBS)、正小PSS(PSS)、零Zs(Zs)、负小(NSs)、负大NBs(NBs)这5个元素组成的模糊集合,其中:
y={-0.003,-0.002,-0.001,0,0.001,0.002,0.003}
隶属函数见表2。
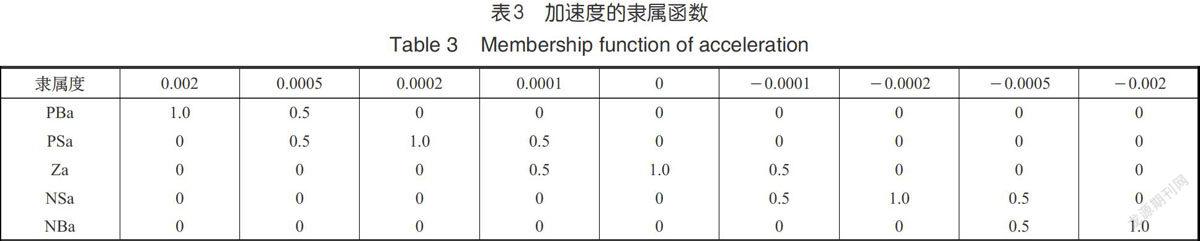
控制量:输出的控制量为智能体在x方向的加速度分量,对于a∈Z,它的模糊集合的论域为:
z={-0.002,-0.0005,-0.0001,0,0.0001,0.0002,0.0005}
追击智能体可以分解为在x轴与Y轴的加速度,考虑在x轴的加速度,y轴同理。加速度为PBa、PSa、Za、NSa、NBa这5个元素的模糊集合。隶属度函数见表3。
3 建立模糊规则
本文中所采用的模糊控制器为双输入单输出的模糊控制器[7],模糊控制器的控制规则采用模糊条件语句:若A且B则C。根据前面定义的观测量和控制量的表示符号,得到如表4所示的控制规则表。
由表4可得25条模糊规则:
规则1:若NBd且PBs,则PSa
规则2:若NSd且PBs,则PSash
…
…
规则25:若PBd且NBs,则NSa
上面的每一个模糊规则都对应一个模糊关系,如规则1:若NBd且PBs,则PSa就对应:
R=s(NBd·PBs)·PSa(2)式中:s(NBd·PBs)表示将矩阵NBd·PBs“拉直”为单列。这样,25条模糊规则对应25个模糊关系:R1、R2,…,R25,而总的模糊关系R为:
R=R1UR2U...UR25(3)
对于任意的观测量distance和speed,我们把它模糊化后分别化为x、y后:
Ace=t(x·y)·R式中:Acc为加速度,t(X·Y)表示把x·Y拉直为行矢量。
4 模糊决策
本文采用的决策方法是加权平均法,选取元素的隶属度为权系数。则有最终的决策量为:
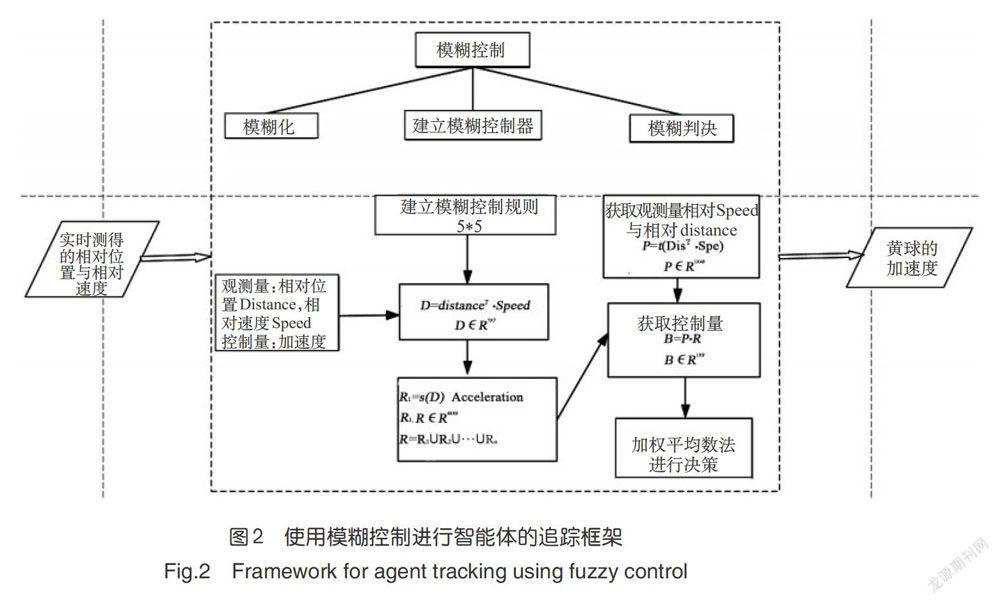
使用模糊控制进行智能体追踪的基本框架如图2所示。
5 试验分析
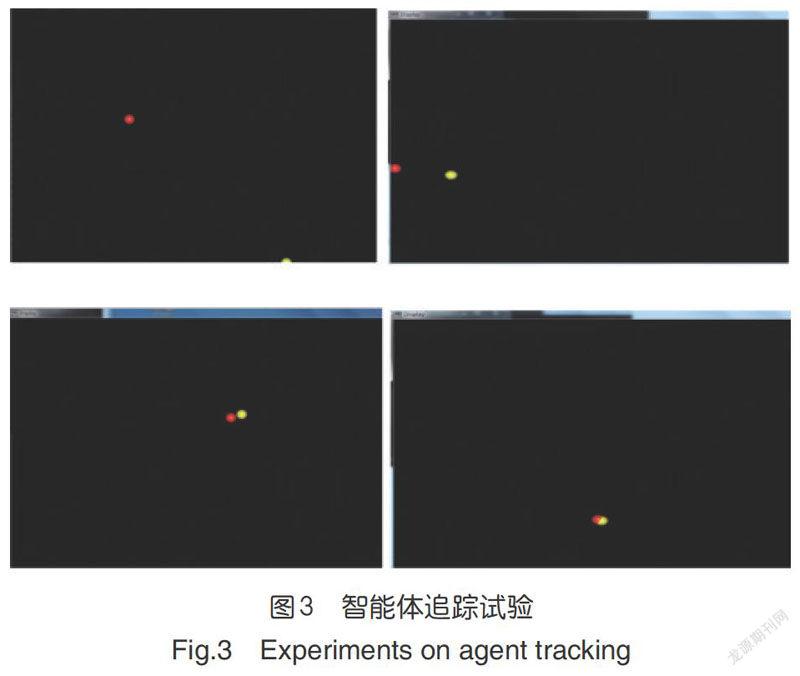
试验在VC++6.0[8]下进行,首先搭建智能体追击仿真平台,在平面内有红球作为被追踪目标,黄球作为追击球,红球在平面内作匀速圆周运动,黄球进行追踪,试验截图如图3所示。
在智能體追踪试验中,红球做匀速圆周运动,初始位置为(0.3,0);运动半径为0.15,以恒定的线速度运动,使用模糊控制控制黄球对红球进行追踪,在追踪过程中,黄球始终保持在红球的附近,对红球“穷追不舍”。同时在试验中当红球距离黄球很远时,红球加速追击,当距离较近时,黄球加速度减小,当红球运动速度改变频繁时,追击球也就是黄球会出现“来回摇摆”的现象。这种现象说明模糊控制容易出现抖动,这是由于模糊控制是一种非线性的控制方式,而并非是一种精确的控制方式导致,但是这种波动是在可以接受的范围内。当加速度论域选择过小时,黄球有追击的趋势,但是始终很难追击到,论域选择过大时,黄球可能会出现“追过头”的情况,追踪效果不好,因此选择合理的论域很重要。
6 结束语
在非线性复杂系统的控制中,经典的自动控制方需要建立精确的运动控制模型,但是建立模型往往需要花费很多的时间和成本,而模糊控制相对于经典的自动化控制方法不需要事先建立精准的控制模型。本文提出了一种使用模糊控制理论的智能体追踪控制方法。该方法通过设计模糊输入、模糊控制规则、模糊决策三个模块构建了一套完整的模糊控制器,并通过试验验证了本文提出方法具有良好的效果。随着模糊控制技术的不断进步,模糊控制理论将会在机器人与自动化控制中有着越来越广泛的应用。
参考文献
[1]杨伦乐.基于T-S模糊双线性模型的非线性系统分析与控制[D].西安:西安电子科技大学,2011.
[2]苗红宇.基于PLC的模糊控制在香皂生产电气控制系统中的应用[D].天津:天津大学,2007.
[3]康元磊.基于蜂拥控制算法的多智能体编队控制研究[D].北京:北京交通大学,2013.
[4]张晓倩,宋晓茹.基于T-S模糊控制器的网络控制系统仿真研究[J].计算技术与自动化,2017,36(2):37-40.
[5]张永亮,赵广超,陈希亮,等.基于知识的指控系统智能决策关键技术研究[J].微型机与应用,2017,36(2):56-59.
[6]Yan B T,Gao X Y,Zhang B Q,et al.Movement decompositionmeasurement of human energy expenditure and efficiency[J].Chinese Journal of Clinical Rehabilitation,2006,10(40):34-36.
[7]Tairidis G,Foutsitzi G,Koutsianitis P,et al.Fine tuning of afuzzy controller for vibration suppression of smart plates usinggenetic algorithms[J].Advances in Engineering Software,2016,101(03):123-135.
[8]Pan Jiateng.wC/OS-11 Porting feasibility analysis based on VC6.0[R].Shanghai Maritime University,2018.
[9]李洪兴,苗志宏,王加银,等.四级倒立摆的变论域自适应模糊控制[J].中国科学:技术科学,2002,32(1):65-75.
[10]于华男,戴军,徐玉如,等.基于遗传算法的水下机器人模糊控制器优化设计[J].哈尔滨工程大学学报,2002,23(5):12-15.
[11]段勇,刘兴刚,徐心和.基于强化学习的机器人模糊控制系统设计[J].系统仿真学报,2006,18(6):182-185.
猜你喜欢
中国测试(2018年9期)2018-05-14
现代职业教育·中职中专(2018年7期)2018-05-14
神州·中旬刊(2017年1期)2017-06-28
内蒙古教育·职教版(2016年11期)2017-01-05
科学家(2016年3期)2016-12-30
科学与财富(2016年26期)2016-12-01
电脑知识与技术(2016年17期)2016-07-23
电脑知识与技术(2016年7期)2016-05-19
计算技术与自动化(2015年4期)2016-03-25
物联网技术(2015年4期)2015-04-27
