
微圆顶结构柔性触觉传感器接触模型与仿真研究
2019-09-11 02:25聂操
传感器与微系统 2019年9期
聂 操
(合肥工业大学 电子科学与应用物理学院,安徽 合肥 230009)
0 引 言
随着机器人技术的不断发展,智能机器人在人们生产生活中发挥着重要作用,人机交互日益频繁,具备触觉感知功能是智能机器人的一个重要特征。机器人电子皮肤(e-skin)是由覆盖在机器人表面大面积、柔性、具有触觉感知和数据处理功能的传感器阵列构成,是仅次于机器人视觉获取环境信息的重要感知形式[1~4]。具备触觉感知的机器人柔性电子皮肤是保障机器人与环境交互安全性、智能性、精准性,以及复杂动态环境下实现机器人与人之间的协同作业、对环境信息的精准、多模态感知的重要因素。
传统硅基、金属应变片式机器人触觉传感器在柔性、延展性及穿戴舒适性等方面存在一定的弊端,为模拟人体皮肤触觉感知功能,在外形结构及感知功能方面,设计具备柔性、可拉伸性、高灵敏度以及可大面积穿戴等特点的触觉传感器成为机器人柔性电子皮肤的研究热点。柔性触觉传感器可分为电阻式、压电式、光电式和电容式等几类[5~7]。对于机器人电子皮肤触觉传感器而言,兼备高柔性、高弹性和高精度测量等特点是柔性触觉传感器设计所面临的主要难题。
触觉传感器中设计微结构是提升其灵敏度的常用方法之一,常见微结构有金字塔、触须状、凹凸状等[8~12]。Park J等人[13]以碳纳米管填充聚二甲基硅氧烷(poly dimethyl siloxane,PDMS)为敏感材料,制备具有圆顶阵列结构的高灵敏度触觉传感器,可实现对法向力、切向力、弯曲以及扭力等检测。高丽大学Choong C L等人[14]在金字塔微结构柔性基体表面包裹一层导电聚合物,利用在触觉力作用下,金字塔微结构与电极间接触电阻和体电阻发生变化,以实现高灵敏度触觉感知。研发具有柔性、高灵敏度触觉感知功能的电容式触觉传感器仍是机器人柔性电子皮肤研究中所面临的问题之一。
本文依据压阻理论和接触力学相关理论,分析微圆顶结构参数对柔性触觉传感器压敏特性的影响,通过数学接触模型和ANSYS有限元仿真论述微圆顶结构有利于提升柔性触觉传感器灵敏度,对高灵敏度柔性触觉传感器设计具有重要意义。
1 微圆顶结构与触觉感知机理
微圆顶结构柔性触觉传感器力觉敏感单元结构示意图如图1(a)所示,选择碳纳米管/炭黑/硅橡胶导电复合材料制备压敏单元,上下两微圆顶结构柔性压敏单元相互接触。图1(b)为微圆顶结构柔性触觉传感器触觉感知机理示意图,在外力作用下,上下两微圆顶受力发生压缩形变,其中,碳纳米管—碳纳米管、炭黑—炭黑以及碳纳米管—炭黑导电相所形成有效导电网络(通路)在硅橡胶母体中变化规律和微圆顶接触面的变化是构成其拉伸应变敏感的主要机制。
碳纳米管/炭黑/硅橡胶力敏材料中,炭黑与碳纳米管和硅橡胶高分子相互作用,其协同补强效应可形成类似“葡萄串”结构且具备良好电学与力学性能的三维导电网络[15~17]。依据渗流理论和导电通路理论,当导电相含量达到渗流阈值时,碳纳米管/炭黑两相填料在硅橡胶基体中形成由“点—点”、“点—线”以及“线—线”组成类似“葡萄串”结构的三维导电网络,两相导电填料间协同导电网络有助于提升导电复合材料的电学稳定性和机械重复性。微圆顶结构在外力作用下发生压缩形变和接触形变,从而引起导电相在柔性基体中有效导电通路发生变化,因此,研究微圆顶结构柔性触觉传感器在外力作用下的形变特点以及微圆顶结构几何参数对压阻特性的影响,对提升柔性触觉传感器灵敏度具有重要意义。
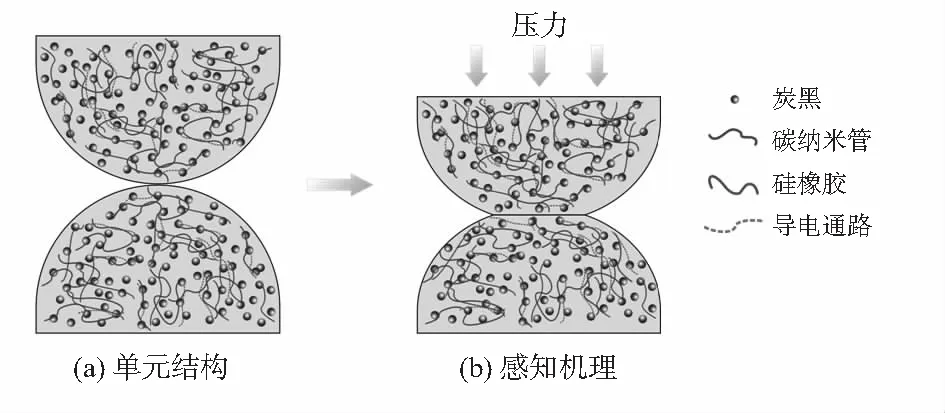
图1 微圆顶结构柔性触觉传感器敏感机敏
2 接触模型与ANSYS仿真分析
2.1 接触模型分析


图2 微圆顶结构接触模型
则A,B两点间的距离为
(1)
当微圆顶接触面在法向力作用下相互作用时会产生圆形接触面,将距离接触面较远的两点因挤压而相互接近的距离记为η,若A,B两点在挤压时重合,则η-(d1+d2)表示A,B在重合后沿接触面法线方向继续产生的位移,A,B各自继续发生的位移分别记作,ω1和ω2,可得
(2)

=(k1+k2)∬qdsdφ
(3)

(4)

图3 微圆顶结构受压力作用时接触面积
(5)
r取不同值时,若上式均能满足,则
(6)
q0/l与半球体积的乘积等于总压力F,则
(7)
最大压力
(8)
将式(2)和式(8)代入式(6)可得
(9)
上式表示了结合粗半径与外加压力之间的函数关系,通过几何不等式变换,可以看出,对于微圆顶结构柔性触觉传感器(R1+R2一定),上下微圆顶曲率半径保持对称,即R1=R2有利于提升柔性触觉传感器的灵敏度。此外,相对于任意形状的曲面(改变曲率半径R),半球型微结构有利于接触半径l随作用力F的变化保持较好的线性度。
2.2 ANSYS仿真分析
柔性触觉传感器微圆顶结构接触属于柔体—柔体接触,受力作用时,微圆顶结构相互挤压,产生圆形接触面,属于面—面接触,且接触的表面应包含不会渗透、可传递法向压缩力和切向摩擦力、通常不可传递法向拉伸力等特征。ANSYS Workbench支持几何模型导入,利用SolidWorks对微圆顶结构柔性触觉传感器进行建模,导入ANSYS Workbench后设置材料属性、网格划分、边界条件设置及添加载荷,经后处理获得微圆顶接触信息。图4为施加10 N法向力作用时微圆顶接触形变仿真结果,可以看出,法向力作用下,微圆顶受力发生接触形变(图4(a))且接触面为圆形(图4(b)),形变由中心至外侧递减,与数学模型中的分析保持一致。
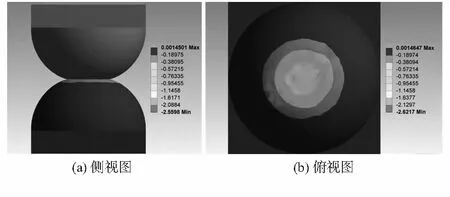
图4 法向力作用下微圆顶接触形变仿真结果
图5为施加10 N法向力作用和4 N切向力作用时微圆顶接触形变仿真结果,相较于单独方向力作用,可以看出,切向力作用下,上微圆顶接触面沿切向力方向发生偏移,接触面积与法向力单独作用时有所减小。微圆顶结构柔性触觉传感器不仅可实现法向力触觉感知,也可以实现切向力触觉感知,可用作智能机器人用柔性电子皮肤。
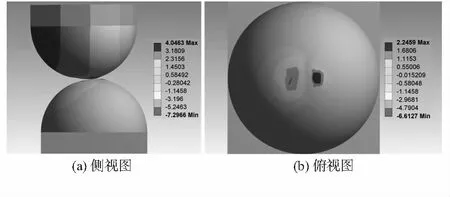
图5 切向力作用下微圆顶接触形变仿真结果
根据式(8)和式(9)可计算不同压力下微圆顶结构最大接触压力与接触半径,通过ANSYS有限元仿真不同法向力作用下接触半径与最大接触压力,表1为不同压力下接触面最大压力q0值与仿真值对比结果,表2为不同压力下接触面接触半径l值与仿真值对比结果。最大接触力和接触半径的数值解析值与仿真值基本吻合,对比结果表明,文中微圆顶结构柔性触觉传感器接触模型与ANSYS仿真结果保持了良好的一致性。
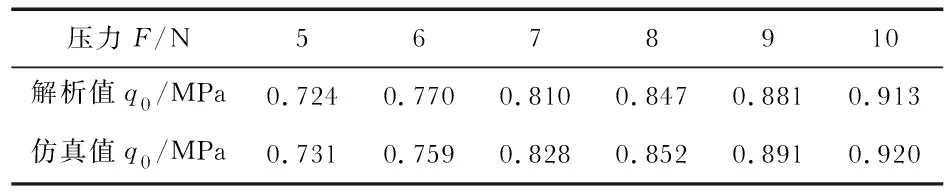
表1 不同压力下接触面最大压力q0值与仿真值对比
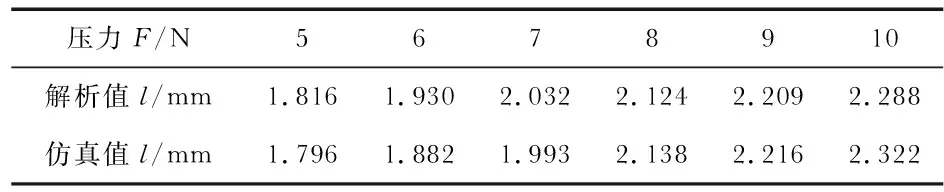
表2 不同压力下接触面接触半径l值与仿真值对比
前文分析了微圆顶结构柔性触觉传感器的敏感机理,为进一步验证文中微圆顶结构柔性触觉传感器具有较高的灵敏度,碳纳米管/炭黑/硅橡胶导电复合材料分别制备无微结构和微圆顶结构柔性触觉敏感单元,测得其压力—电阻曲线如图6所示。
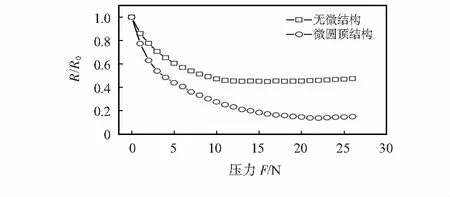
图6 微圆顶结构柔性触觉传感器压力—电阻曲线
可以看出,微圆顶柔性触觉传感器具有较高的触觉感知灵敏度。
3 结 论
针对高灵敏度柔性触觉传感应用需求,依据压阻理论和接触力学,结合数值分析模型与ANSYS有限元分析阐述微圆顶结构几何模型对柔性触觉传感器性能的影响。数值解析与仿真结果保持良好的一致性,验证了文中提出微圆顶结构数学接触模型的正确性,同时,论述了通过设计微圆顶结构有助于提升柔性触觉传感器的灵敏度和线性度,为高灵敏度柔性触觉传感器设计提供了设计方案。
猜你喜欢
电机与控制应用(2022年9期)2022-09-29
环球市场(2021年34期)2021-12-16
检察风云(2020年15期)2020-09-26
安徽工程大学学报(2020年2期)2020-07-16
湖北教育·科学课(2020年2期)2020-05-26
湖南大学学报·自然科学版(2020年4期)2020-05-06
石油与天然气化工(2020年2期)2020-04-30
小猕猴智力画刊(2020年3期)2020-04-08
中外公路(2019年6期)2019-06-09
橡胶工业(2018年4期)2018-07-23
