遥感图像道路信息提取的仿真分析研究
2019-09-24 01:08宋伟贺伟鹿旭升崔红婕
科技创新与应用 2019年25期
宋伟 贺伟 鹿旭升 崔红婕

摘 要:随着遥感技术的飞速发展,高分辨率遥感图像变得极易获得,而提取遥感图像中道路信息更是具有极大的现实意义。从遥感图像中提取的道路信息是结合直方图阈值分割技术和数学形态学研究出一种半自动的遥感图像道路提取方法。通过观察遥感图像的灰度直方图,选择出合适的阈值并分割出初始道路信息。初始道路会包含大量的颗粒噪声且道路会出现间断等情况。利用中值滤波器能够滤除原始道路图像中的颗粒噪声,利用数学形态学的方法可以消除物体间的粘连和填充道路孔洞。通过仿真分析,验证了研究的遥感图像道路提取方法和有效性。
关键词:遥感图像;阈值分割;数学形态学;道路提取
中图分类号:TP751.1 文献标识码:A 文章编号:2095-2945(2019)25-0018-04
Abstract: With the rapid development of remote sensing technology, high-resolution remote sensing images become easy to obtain, and the extraction of road information from remote sensing images is of great practical significance. The road information extracted from remote sensing image is combined with histogram threshold segmentation technology and mathematical morphology to study a semi-automatic road extraction method from remote sensing image. By observing the gray histogram of remote sensing image, the appropriate threshold is selected and the initial road information is segmented. The initial road will contain a lot of particle noise and the road will be interrupted and so on. The median filter can be used to filter the particle noise in the original road image, and the mathematical morphology method can be used to eliminate the adhesion between objects and fill the road holes. Through the simulation analysis, the road extraction method and effectiveness of the remote sensing image are verified.
Keywords: remote sensing image; threshold segmentation; mathematical morphology; road extraction
1 概述
遙感技术具有采集数据速度快、实时性高、探测范围大、不受时间和地域条件的限制等优势。在近二十年的飞速发展中,遥感技术已广泛应用于军事侦察、海洋、地理、测绘、农业、水利、环境保护等方面,在国防建设和科学研究等方面发挥着重要的作用。随着我国基础设施的飞速发展,尤其是在加快信息化的进程中,我国的遥感技术得到了飞速的发展。在现代遥感技术应用中,由于我国高分辨率卫星遥感图像发展速度快,应用遥感技术对地观测的能力不断提高,高分辨率遥感图像的研究已成为研究热点。早期的高分辨率遥感卫星主要应用于军事,随着遥感信息的图像成本逐渐降低,遥感技术逐渐应用于商业。
在遥感图像提供的信息中,道路信息无疑是非常重要的。随着我国的经济飞速发展,人民对于美好生活的标准逐渐提高,准确获取实时交通信息和道路流量状况是人民和交通部门最基本的需求。早期的道路信息获取主要需要人工现场勘查,这需要投入大量的人力、物力,而且采集周期长。因此,如何利用遥感道路图像来快速的提取道路显得尤为重要。
2 遥感图像道路特征
不同的物体往往有不同的特征,了解道路的基本特征有助于我们设计实验从而设计遥感道路提取算法。遥感道路图像的特征可分为几何特征、辐射特征、拓扑特征、功能特征和上下文特征。
(1)几何特征:道路一般呈长条形,而且道路的长度大于宽度。在一定范围内,道路会呈现直线形状,在弯道中,曲率有一定的限制。
(2)辐射特征:道路的灰度值与其他区域的灰度值有明显的区别,所以图像中的道路有明显的边缘。
(3)拓扑特性:道路往往呈现为网状结构,一般是贯通的、连续的。
(4)功能特征:道路分为快速路、主干路、次干路和支路。主干路是城市道路的骨架,主要功能是交通运输;次干路兼有服务功能;支路起疏散交通的作用。
(5)上下文特征:上下文特征分为局部和全局,局部上下文特征指的是道路两旁的信息,如树木。全局上下文特征指的是道路所处的区域,如乡村、田野、城区等。
3 图像处理基础理论
3.1 灰度直方图
灰度图像的直方图(简称灰度直方图)是一种表示数字图像中各级灰度值与其出现频率关系的函数,可以看作是像素灰度值出现的概率函数图。灰度直方图的横轴表示像素的灰度级别,范围为0~255,共256个灰度级别;纵坐标表示各个灰度级别出现的概率。若灰度图像的灰度级范围为[0,L-1],则灰度图像的直方图定义为
式中,rk是第k级灰度值,nk是灰度值为rk的像素个数,h(rk)是灰度图像直方图的离散函数。
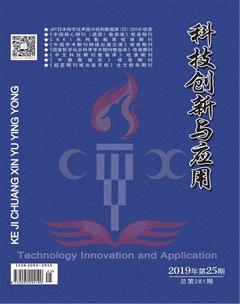
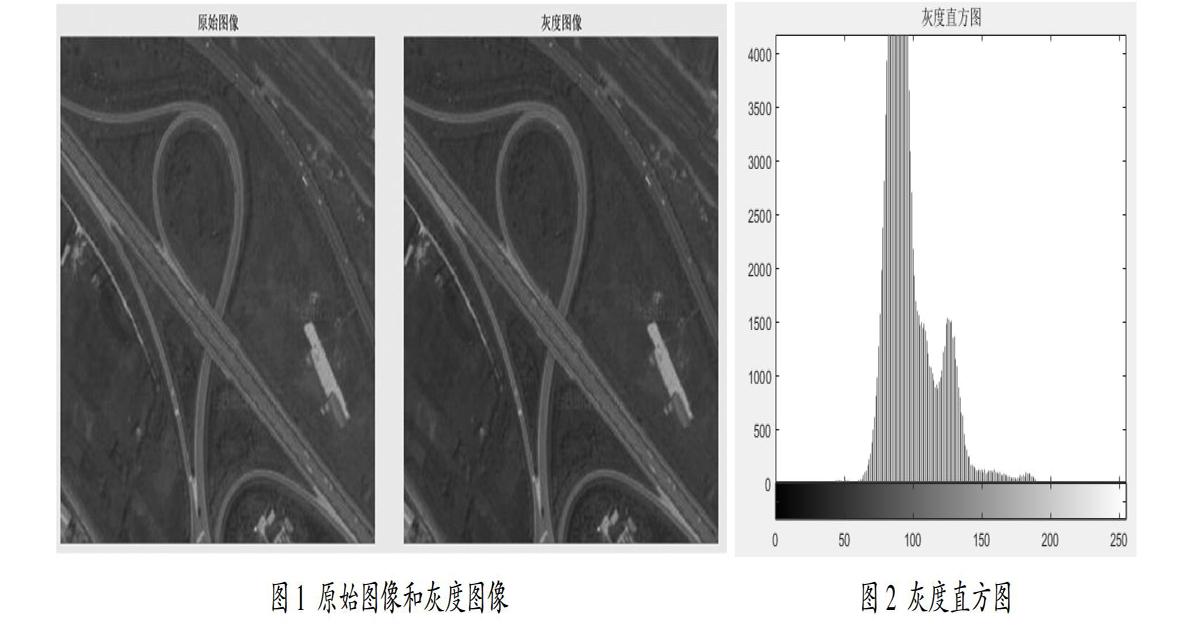
在观察彩色遥感图像的灰度直方图时,首先把彩色图像转化为灰度图像,如图1所示,然后再显示灰度图像的直方图,如图2所示。
3.2 阈值分割技术
阈值分割是图像分割方法中较为简单的一种,因其实现较为简单且性能稳定而成为应用最广泛的分割方法。设图像的灰度直方图的灰度级范围为[0,L-1],灰度级为k时,像素为nk,则该图像的总像素数N可表示为
灰度级出现的概率为
目标与背景有较大差异时,图像的灰度直方图往往会出现两个双峰的情况,此时图像可大概分为两个部分。在此情况下,从背景中提取目标首先要确定阈值。在灰度直方图中,左侧的山峰对应背景,右侧的山峰对应目标,所以要选取两个山峰之间的谷底对应的灰度值T作为阈值。在进行直方图分割时,判决条件如下:
(1)灰度值Ti大于或等于阈值T时,判决为目标;
(2)灰度值小于阈值T时,判决为背景。
即对于图像f(x,y),基于阈值的图像分割方法可以定义为
也可以定义为
其中,g(x,y)为分割出的二值图像。
3.3 非线性平滑滤波图像增强方法——中值滤波法
中值滤波是一种去除噪声的方法,是非线性滤波器,能够有效地保留图像的边缘信息。中值滤波的原理是利用中值滤波窗口,取窗口所覆盖区域的所有灰度值中的中间值,用中间值代替所覆盖区域中心像素点的灰度值。
中值滤波器可以定义为
式中,f(x,y)表示图像中位于(x,y)点的灰度值,g(x,y)表示滤波窗口所覆盖区域为A的中值滤波结果。
中值滤波法大致有三种实现方法:
(1)直接选择特定窗口滤波;
(2)先使用小窗口滤波,再使用大窗口滤波;
(3)先使用一维滤波,再使用二维滤波。
利用中值滤波法的过程可简单叙述如下,先选定窗口的形状并根据窗口形状确定窗口的中心像素在图像上的重合方式,然后利用窗口进行扫描并且将扫描到灰度值按大小进行排列,然后找到中间灰度值,最后把中间灰度值赋值给窗口中心像素。
3.4 灰度形态学的基本运算
3.4.1 灰度腐蚀
假设灰度图像用A表示,结构元素用B表示,则用结构元素B对灰度图像A进行灰度腐蚀的过程为:
(1)将结构元素B的原点重叠在灰度图像A的中心元素上。
(2)依次用灰度图像A的中心元素减去B的各个元素并将计算结果放在对应位置上。
(3)将结构元素B的原点移动到与原始图像A的中心元素相邻的8个元素上进行(2)的相同操作,得到8个结果。
(4)取步骤(2)和步骤(3)所得到的9个结果的最小值,此最小值即为腐蚀结果。
按以上步骤依次计算,即可得到图像A的腐蚀结果。
灰度腐蚀的运算是逐像素点进行的,求某像素点的腐蚀结果即求在该像素点和其附近的8个像素点与结构元素中的对应位置进行相减运算,运算对得到9个结果,其中的最小值即为该像素点的灰度腐蚀结果。
3.4.2 灰度膨胀
假设灰度图像用A表示,结构元素用B表示,则用结构元素B对灰度图像A进行腐蚀的过程如下:
(1)将结构元素B的原点重叠在灰度图像A的中心元素上。
(2)依次用灰度图像A的中心元素加上结构元素B的各个元素并进行相加计算,并将计算结果放到对应位置上。
(3)将结构元素的原点移动到与原始图像的中心元素相邻的8个元素上进行(2)的相同操作,得到8个结果。
(4)取步骤(2)和步骤(3)所得到的9个结果的最大值,此最大值即为膨胀结果。
(5)按以上步骤依次计算,即可得到图像A的腐蚀结果。
灰度膨胀的运算是逐像素点进行的,求某像素点的膨胀结果即求在该像素点和其附近的8个像素点与结构元素中的对应位置进行相加运算,运算对得到9个结果,其中的最大值即为该像素点的灰度腐蚀结果。
3.4.3 灰度开运算
假设结构元素用b表示,灰度图像用f表示,则用结构元素b对灰度图像f进行灰度开运算可表示为
灰度开运算的过程为:在灰度图像下方滑动结构元素,在每个像素点计算结构元素上的最高点,最高点的集合即为开运算的结果。
灰度开运算能够去除灰度图像中的较小的明亮细节,保持整体灰度不变的作用。
3.4.4 灰度闭运算
假设结构元素用b表示,灰度图像用f表示,则用结构元素b对灰度图像f进行灰度闭运算可表示为
灰度闭运算的过程为:在灰度图像下方滑动结构元素,在每个像素点计算结构元素上的最低点,最低点的集合即为闭运算的结果。
灰度闭运算能够去除图像中比较暗的细节部分,能够保持明亮区域。
4 基于阈值分割和形态学的道路提取方法
4.1 道路提取流程和步骤
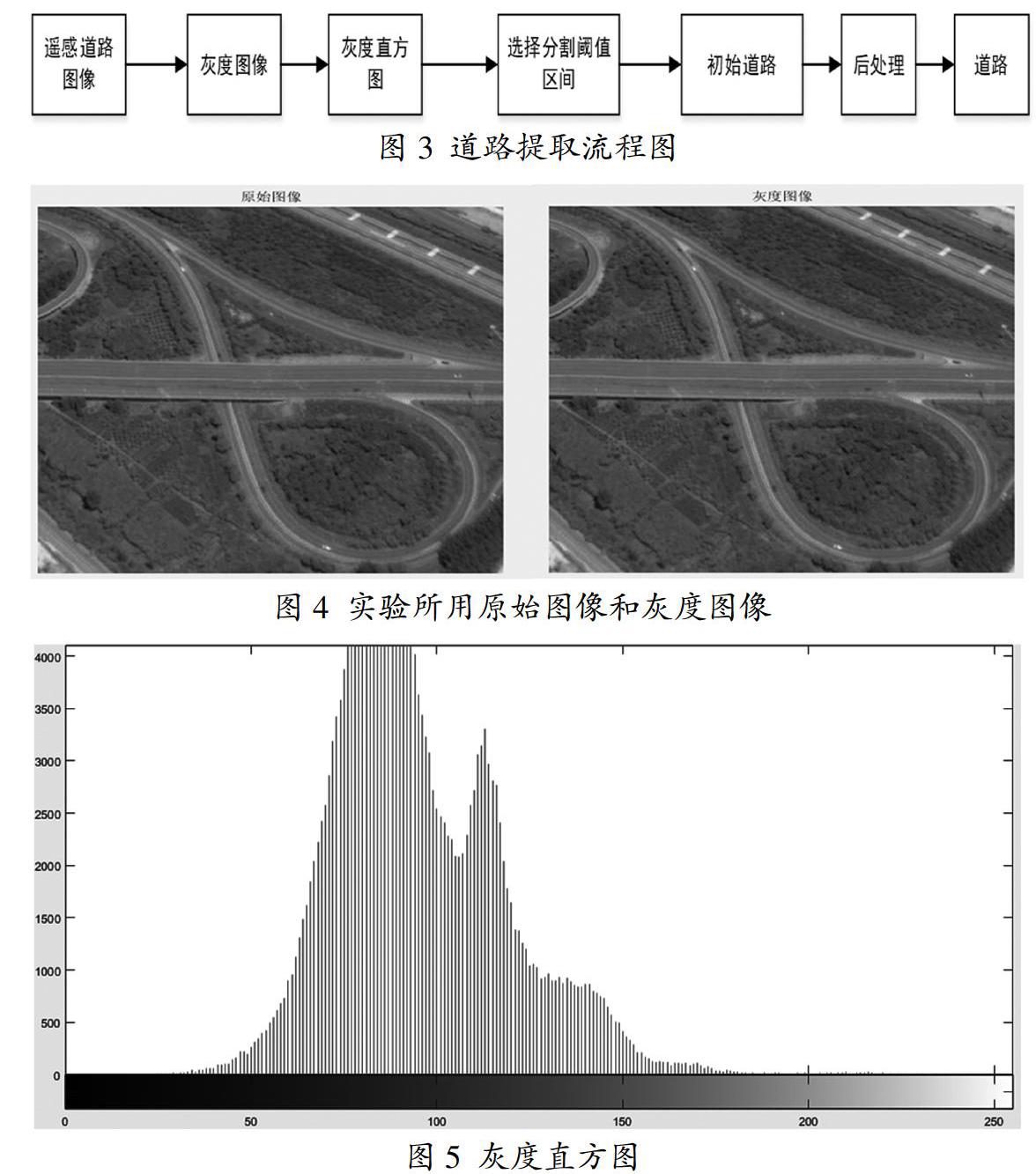
本文研究的是直方图和数学形态学结合的方法,流程图如3所示。
具体操作步骤为:(1)将彩色遥感道路图像转换成灰度图像。(2)显示灰度直方图,观察灰度直方图并选择合适的阈值。(3)根据所选择的阈值进行图像分割,得到大致道路图像。(4)选择合适的中值滤波模板滤除初始道路图像中的小颗粒噪声。(5)利用形态学处理中值滤波后的图像,粘连道路并去除非道路信息。(6)图像叠加。本设计流程中,选择合适的阈值是进行图像分割的关键,而且選择合适的中值滤波模板和选择合适的结构元素也同样重要。选择阈值要观察灰度直方图或借助数学方法,选择中值滤波模板和选择结构元素需要借助实验进行观察实验后的效果。
4.2 遥感图像道路信息提取的具体方案
4.2.1 彩色遥感图像灰度化
将彩色图像转化为灰度图像通常有三种处理方法,分别为最大值法、平均值法和加权平均值法。假设彩色图像用f(x,y)表示,灰度图像用g(x,y)表示,每个像素的分量为R、G、B。
(1)最大值法用公式可以表示为
(2)平均值法用公式可以表示为
(3)加权平均值法可以表示为
4.2.2 阈值分割提取初始道路
观察图4中原始图像的灰度直方图,选择合适的阈值,把初始道路提取出来。灰度直方图如图5所示。
由图5所示的灰度直方图可以观察得到:该灰度图像的直方图有两个明显的山峰,左边的山峰较高而且山比较宽,右边的山峰较低而且山较窄。结合灰度图像可以发现,图像中有两个明显的特征,分别为道路和道路两旁的植被,而且道路两旁的植被在该灰度图像中所占的区域比较大。由此可以推断出,左边的山峰对应图像中的植被,右边的山峰对应图像的道路。
阈值应当选取为两个山峰之间的山谷,经过观察图5选择阈值为T=110,提取灰度值大于110的图像即为初始道路图像。初始道路图像如图6所示。
4.2.3 中值滤波去除颗粒噪声
由于受光照、反射、阴影等客观因素的影响,卫星在获取图像的过程中会出现同一类别的区域(如植被)的颜色不统一,这就会造成灰度值的差别。所以在阈值分割后的初始道路中会出现大量的颗粒噪声。
中值濾波器能够很好地消除图像中的颗粒噪声。选择合适的中值滤波模板是进行中值滤波的关键,中值滤波器的模板选择通常借助实验的方法。
4.2.4 数学形态学处理
虽然初始道路图像经过中值滤波消除了大量的颗粒噪声,但是在图像中依然存在大量的道路间断和道路孔洞。由数学形态学理论分析可知,开运算能够消除两个物体间的粘连,闭运算能够连接间断道路和填充孔洞。
4.2.5 最终道路提取效果
将开运算处理后的结果与原始彩色遥感图像叠加,道路的颜色为白色,得到最终的遥感图像道路信息提取效果如图7所示。
5 结论
本文所研究的遥感道路提取方法的主要步骤有:图像灰度化、阈值分割、中值滤波、开运算和闭运算和图像叠加。将彩色图像灰度化能够加快图像处理的速度,而且中值滤波器能够滤除图像中大量的颗粒噪声。在研究中,阈值的选取是非常重要的,选择争取的阈值是后续研究的基础。在后续的中值滤波器的设计中,设置合适的中值滤波模板也同样重要。本文通过MATLAB图像处理平台,验证了本文研究的道路提取方法的有效性。
参考文献:
[1]李华胜.基于遥感影像的道路信息提取方法研究[D].内蒙古工业大学,2015.
[2]李润生,曹闻.基于视觉显著性特征的遥感影像道路网提取方法[J].计算机系统应用,2014,23(8):114-118.
[3]阙昊懿.基于遥感图像的城市道路及车辆信息采集研究[D].湘潭大学,2014.
[4]李俊山,等.数字图像处理(第三版)[M].北京:清华大学出版社,2017:1-278.
[5]Wijesingha J.S.J., Kumara R.W.D.M., Kajanthan P., et al. Automatic Road Feature Extraction from High Resolution Satellite Images Using LVQ Neural Networks[J]. Asian Journal of Geoinformation, 2013,13(1):30-36.
[6]Alex D.M.. Robust and Efficient Method to Extract Roads from Satellite Images[J]. International Journal of Latest Trends in Engineering and Technology(IJTET), 2013,2(3):26-29.
[7]Miao Zelang, Wang Bin, Shi Wenzhong, et al. A Method for Accurate Road Centerline Extraction From a Classified Image[J]. IEEE JOURNAL OF SELECTED TOPICS IN APPLIED EARTH OBSERVATIONS AND REMOTE SENSING,2014,7(12): 4762-4771.