一种凌乱滤嘴棒识别的方法
2019-09-28 02:41何琦多张勇刚
科技视界 2019年24期
何琦多 张勇刚
【摘 要】在卷烟机上,滤嘴棒料库区偶尔发生滤嘴棒凌乱的现象。滤嘴切割股不能正常提取滤嘴棒,使得设备停机。本文寻求一种有效方法来检测出料库区域的凌乱现象,提醒操作人员及时处理,避免设备停机,保证设备运行效率。
【关键词】滤嘴棒凌乱;图像识别;matlab仿真
中图分类号: TS761.2文献标识码: A文章编号: 2095-2457(2019)24-0025-002
DOI:10.19694/j.cnki.issn2095-2457.2019.24.013
【Abstract】In the storage of cigarette machine,the filter bars occasionally disorder.Filter cutting drum can not transfer filter rods normally,result to the equipment stop.This paper seeks for an effective method to detect the disordered bars,to remind the operator to deal with it in time,to avoid the stop of the equipment accidentally, and to ensure the equipment operating efficiency.
【Key words】Disordered filter bar; Image identification; Matlab emulator
0 引言
4倍长滤嘴棒由发射装置进入料库,滤嘴切割鼓通过不停顺时针旋转,将滤嘴棒从料库中取出,并经过切割,排直等一系列步骤,与烟条,水松纸组合加工成烟支。料库区的凌乱滤嘴棒不能顺利进入切割鼓鼓槽,切割股不能正常取出滤嘴棒。为了避免生产出缺滤嘴烟支,当连续监测出缺3个槽没有滤嘴时,设备自动停机。由于在生产线上,操作工任务繁多,加之,操作人员容易产生疲劳,注意力不集中,操作人员经常不能发现料库区凌乱滤嘴棒,以至不能提前理整齐滤嘴棒,造成设备停机。人工观察凌乱滤嘴棒效率低,强度高,也逐渐不能适应自动化生产和高速高效生产的要求。查阅相关文献可以发现,有许多较为成熟的视觉检测公司都开发出了较为成熟的产品在烟机设备上使用,诸如大树科技的ZN0248小包外观质量在线检测系统、FK 光电式小包烟支检测器、小包CCD图像外观检测器、B1光电小包烟支检测器等等[1]。但市面上产品价格高,且基本上是识别产品缺陷的,而没有识别凌乱滤嘴棒的,凌乱滤嘴棒的识别研究具有现实意义。
1 凌乱现象及识别目标分析
在处理前,先对嘴棒凌乱情况有所了解,以便我们能选出合适的算法。
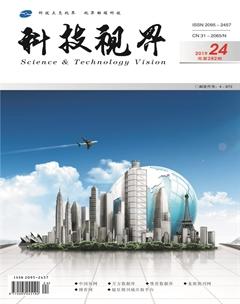
图1为正常排列嘴棒与凌乱嘴棒几种典型情况的对比图片:图(a)为正常排列得滤嘴棒;图(b)为滤嘴棒横置在料库前方的情况;图(c)为滤嘴棒横置在料库后方的情况,图(d)为凌乱嘴棒倾斜交错排列的图片。在识别图像时识别流程大致可以分为三段,(1)图像预处理,(2)凌乱区域表达(3)特征值与阈值比较。
分析凌乱的图像我们可以发现,无论凌乱在什么地方,都会使得其周围滤嘴棒排列不紧密造成空洞,如果我们能识别出该空洞区域,也能间接地识别出凌乱区。下面我们就根据该思路进行目标识别。
2 二值化图像
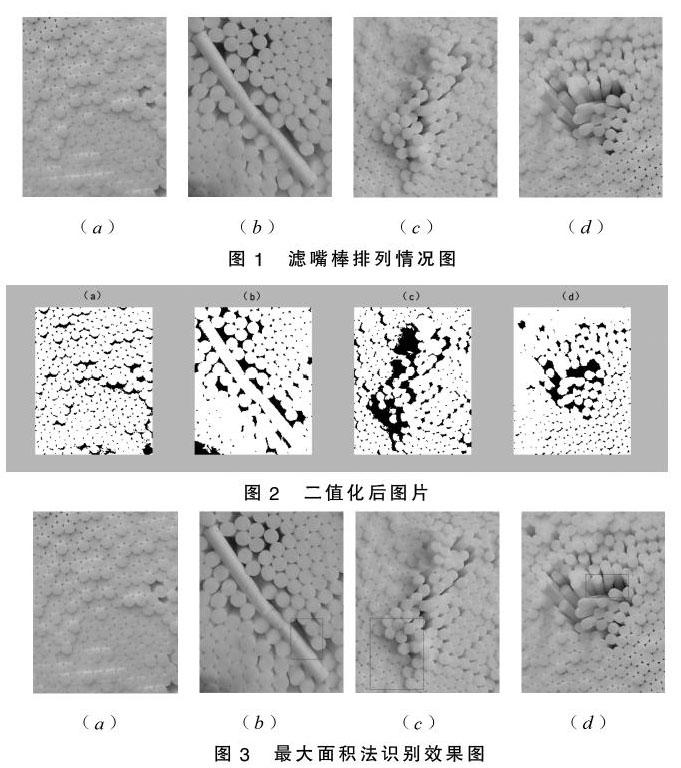
为了减少图像处理的时间,一种有效的方法,就是将待处理图像转化为灰度图像,转化为灰度图像后就是对图像的二值化处理。二值化是图像处理中最简单的一种图像分割技术,利用背景与对象之间的灰度差异,可以把图像从背景中分离出来,特别是背景与对象之间的灰度差异较大时,分割效果较好。阈值T的确定,可以说是图像二值化的关键所在,二值化图像的方法有几十种,比较常见的有P参数法,Otsu法,最大熵阈值法,迭代法等[2]。分析其直方圖发现,二值化后图像直方图基本上是单峰的,故我们采用Otsu法来分割滤嘴棒和空洞部分。图2为用matlab二值化后的图片。
3 特征提取与阈值比较
在二值化图形上,可以对连通域进行标记。在进行连通域标记前先进行图像求负片,然后对求负片图像求出最大连通域的面积,通过之前的标记识别出最大面积连通区域,判断最大连通区域是否大于一定的阈值,若大于,则判断有凌乱的滤嘴棒。并把最大连通域标识出来。
对二值图像的标记算法有很多种,比如基于边界的标记算法,基于跑长码的标记算法[3],基于游程的标记算法[4]。而matlab和OpenCV上都有相应的连通域标记函数,在matlab仿真过程中,我们采用bwlabel()对图像进行标记,采用regionprops()函数求连通域的面积。
因为拍摄距离有差距,图像中包含滤嘴棒数目差距较大,阈值的确定不能简单地取一个固定值。我们可以根据霍夫变换在滤嘴棒排列图上识别出滤嘴端面。再根据识别出的圆半径r,就可以求出其滤嘴端面的面积。具体方法为:(1)对灰度图像进行二值化操作,然后根据边缘检测函数edge提取图形的边缘。提取完后对图像进行霍夫变换,将图像像素从2D空间坐标转换到参数空间;(2)在参数空间中取不同r值,求不同r值下交点数最多的点(即为同一圆上的点);(3)再比较不同r值的交点数,求出交点数最多的r值,该r即为滤嘴端面半径;(4)我们根据最大的r计算出滤嘴端面面积为S。我们另外取10幅正常排列的图片和10幅排列凌乱的图片实验当阈值为2.3S时,能很好地识别出凌乱区域,而又不会把正常排列的滤嘴棒中的小孔洞进行识别成凌乱区域。因此我们最终取判断有凌乱滤嘴棒的阈值设为2.3S,当二值化图像中白色区域(取负片后)的面积大于2.3S时,则判断有凌乱区,并用红色的外接矩形把凌乱区域绘制在原始图像上。
4 识别效果检验
对图2中的四幅图像二值化后求其最大连通域面积,并把最大连通域的外接矩形标识在图片上,其识别效果为:
其中图(a)为正常排列得滤嘴棒;图(b)为滤嘴棒横置在料库前方的情况;图(c)为滤嘴棒横置在料库后方的情况,图(d)为凌乱嘴棒倾斜交错排列的图片。从中可以看出取最大连通域的识别方法能较好地识别出凌乱嘴棒区域。
5 结论
综上所述,本文对滤嘴棒凌乱的常见情况进行分析,结合其凌乱特点,寻找到了一种有效的识别方法:把拍摄到的图片二值化后,寻找最大连通域面积,通过设定适当阈值(滤嘴端面的2倍),能正确识别出凌乱区域。该方法简单高效,后续设计嵌入式图像识别系统编程难度较低,硬件要求低,是一种行之有效的方法。
【参考文献】
[1]戴刚.烟盒结构光视觉检测与信息处理应用技术研究. 南京理工大学硕士论文,2013.
[2]阮秋琦.数字图像处理学.第3版.2013:电子工业出版社.
[3]张桂林,陈益新.基于跑长码的连通区域标记算法.华中科技大学学报(自然科学版),1994(5):p.11-14.
[4]徐利华,陈早生.二值图像中的游程编码区域标记.光电工程,2004.31(6):p.000063-65.
猜你喜欢
电子制作(2019年16期)2019-09-27
中国交通信息化(2019年4期)2019-07-13
电子制作(2018年19期)2018-11-14
电子制作(2018年14期)2018-08-21
电子测试(2017年23期)2017-04-04
科学与财富(2016年26期)2016-12-01
考试周刊(2016年11期)2016-03-17
电子设计工程(2015年8期)2015-02-27