基于遗传算法和阈值滤噪的玉米根茬行图像分割
2019-10-10 02:24王春雷卢彩云陈婉芝李洪文王庆杰
农业工程学报 2019年16期
王春雷,卢彩云,陈婉芝,李洪文,何 进,王庆杰
基于遗传算法和阈值滤噪的玉米根茬行图像分割
王春雷,卢彩云,陈婉芝,李洪文※,何 进,王庆杰
(1. 中国农业大学工学院,北京 100083;2. 农业部河北北部耕地保育农业科学观测实验站,北京 100083)
作物行的识别是农业机械视觉导航系统的一项重要研究内容,针对华北一年两熟区玉米利用联合收获机留茬收获后,农田原始图像中背景目标多(行间秸秆、裸露地表等),且背景目标与玉米根茬颜色接近,难以实现玉米根茬行准确快速分割的问题,该文采用RGB颜色空间,以根茬顶端切口为目标,提出了一种基于遗传算法和阈值滤噪的玉米根茬行图像分割方法。首先,为了降低图像分割难度,选取图像中间位置包含一条完整玉米根茬行的矩形区域作为感兴趣区域(region of interest,ROI);然后,利用经过遗传算法优化得到的灰度化算子对ROI进行灰度化,采用单阈值法分割ROI;最后,通过形态学腐蚀处理去除孤立点、毛刺等误分割情况,同时利用基于连通域面积阈值和偏距阈值的滤噪方法滤除根茬行两侧噪声,实现玉米根茬行的有效分割。为评价该分割方法,利用从农业部河北北部耕地保育农业科学观测实验站采集到的200幅玉米根茬行图像进行试验。结果表明:该方法能够较好的适应晴天光照条件变化,从含有裸露地表、玉米行间秸秆等复杂背景下,准确快速地分割出玉米根茬行,平均相对目标面积误差率为24.68%,处理一幅1 280像素×1 024像素的彩色图像平均耗时为0.16 s,具有较好的鲁棒性、实时性和准确性。研究结果验证了基于遗传算法和阈值滤噪方法实现玉米利用联合收获机留茬收获后根茬行图像分割的可行性,并为玉米根茬行直线检测提供良好的基础。
图像分割;机器视觉;遗传算法;阈值滤噪;玉米根茬行
0 引 言
在华北一年两熟区的玉米留茬地,实行小麦对行免耕播种不但可以发挥免耕播种减少风蚀、水蚀,改善土壤理化性质的优点,还可以减少机具的堵塞问题[1-3]。然而目前的小麦对行免耕播种普遍都是依赖于驾驶员驾驶经验完成,驾驶员作业强度大且对行精度和作业效率无法得到保证。因此,研究利用机器视觉导航方法实时、准确检测玉米根茬行,引导小麦对行免耕播种机在根茬行间作业,对于提高对行精度,作业效率和播种质量都有着重要的意义。
作为农业机械视觉导航系统的基础,前景目标的准确快速识别直接影响到系统的准确性和实时性。近年来,国内外学者提出了许多适用于耕、种、管和收等农业机械化生产过程中农田前景目标的分割方法。在耕种环节,研究人员通过将作业地块和未作业地块的分界线、划行器的划痕、播种行及水稻插秧作业过程中的已插植秧苗行等作为目标特征,分割目标[4-7];在田间管理阶段,研究人员将绿色作物作为目标,通过凸显绿色特征分割作物[8-11];在收获期,研究人员将收获作业过程中收获地块与未收获地块自然形成的分界线作为前景特征进行图像分割[12-14]。上述研究在各自的应用领域都取得了一定的效果,但通过分析发现,上述分割方法适用于农田图像中的待分割前景目标与背景目标间存在明显差异(颜色、亮度等)的情况,而玉米利用联合收获机留茬收获后,图像中含有大量背景目标,如裸露地表、行间秸秆等,且颜色与玉米根茬接近,因此上述分割方法并不适用于玉米利用联合收获机留茬收获后的根茬行图像。
遗传算法作为一种常见的全局优化搜索算法已被用于导航线提取、自动控制等领域[15-16]。连通域概念作为图像处理系统的一项重要内容,常用于提取目标区域,并统计目标区域的特征参数如面积、质心等[17-18]。因此,本文在分析玉米利用联合收获机留茬收获后根茬行图像分布特点的基础上,结合遗传算法和连通域概念,提出一种基于遗传算法和阈值滤噪的根茬行图像分割方法,以期为后续准确快速地检测出根茬行直线,引导小麦对行免耕播种机沿导航线进行对行免耕播种提供基础。
1 图像采集
本文以玉米利用联合收获机留茬收获后的根茬行为研究对象,采用嘉恒中自图像技术有限公司生产的型号为OK_AC1310的CCD彩色摄像头,AVENIRLENS公司型号为SE0614MP-3C的镜头获取根茬行图像,其中图像传感器(CCD)尺寸为7.6 mm×6.2 mm,镜头焦距为6 mm,相机视场角为78.52°,拍摄地点是农业部河北北部耕地保育农业科学观测实验站,拍摄时间为2014-2016年每年10月初。参考农业车辆视觉导航、农具视觉导航等相关研究中的相机安装位置,在多次前期初步试验的基础上确定拍摄时摄像头距地面的高度约1 m,与水平方向的夹角约40°,且使摄像头正对一条玉米根茬行[19-20]。按照当前高度和夹角拍摄时,相机能够获得前方约3 m的农田信息,投射的采集面约是4 m×3 m,投射范围的尺度比例约是4:3。共采集图像250张,包括50幅样本图像(包括25幅晴天强光条件和25幅晴天弱光条件),用于获取根茬顶端切口、裸露地表和行间秸秆3类像素的样本图像和滤噪阈值的面积阈值和偏距阈值等,100幅晴天强光条件下采集的图像(如11:00-14:00、天气晴朗)和100幅晴天弱光照条件下采集的图像(如早上或傍晚,多云等)作为测试图像,用于验证本文提出算法的性能[21-22],采集图像格式为.jpg,图像分辨率为1 280´1 024像素。
2 基于遗传算法和阈值滤噪的分割方法
基于遗传算法和阈值滤噪的玉米根茬行分割方法主要分为3个处理流程,如图1所示。1)ROI选取:选取玉米根茬行图像中间位置包含一条完整玉米根茬行的区域作为ROI,降低分割难度;2)图像灰度化及分割:针对现有图像中目标(根茬顶端切口)和背景(行间秸秆、裸露地表)3类像素,利用遗传算法优化灰度化算子以增强目标,抑制背景,并通过得到的灰度化算子对ROI进行灰度化处理,采用单阈值法分割灰度化的ROI;3)噪声滤除:先通过形态学腐蚀处理滤除ROI二值图像中的孤立点、毛刺等,然后通过基于连通域面积阈值和偏距阈值的方法滤除根茬行两侧噪声(滤噪阈值通过标记形态学腐蚀处理后的50幅样本图像的ROI二值图手动获取),最后得到只含有玉米根茬行的二值图。
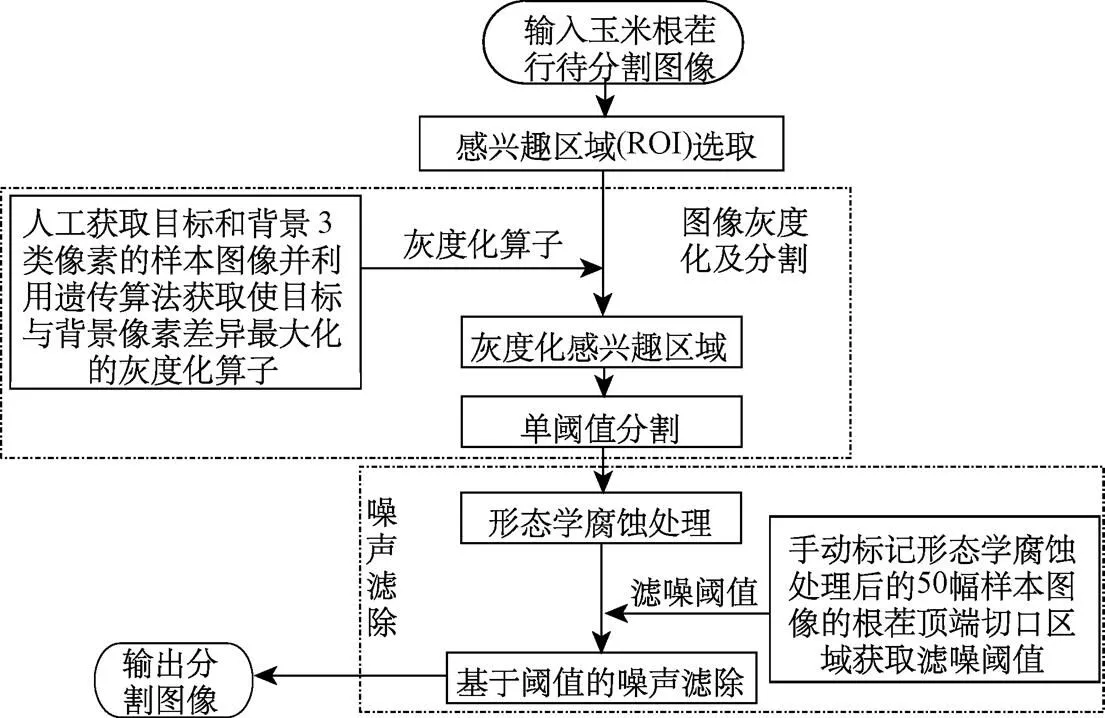
图1 玉米根茬行图像分割流程图
2.1 颜色空间选择
农田环境下获得的玉米根茬行图像,由于背景复杂且颜色与目标接近、光照强度不均匀等实际情况,导致玉米根茬行的实际分割效果较差,因此要选取适于目标颜色特征表达的颜色空间。RGB,HSI,YCbCr和Lab等是目前较为常用的4种颜色空间,而这些颜色空间在表达上又有着各自侧重点[23]。
为准确描述复杂农田环境下的玉米根茬行图像,将图像分为根茬顶端切口,行间秸秆和裸露地表3部分。首先,人工获取目标和背景3类像素的样本图像,其获取流程如下:1)利用Photoshop软件矩形选框工具中的固定大小功能,设定10×10像素的单位像素块;2)人工通过该单位像素块从50幅样本图像的每幅图像中,随机采样根茬顶端切口、行间秸秆和裸露地表各2个共计300个;3)利用Photoshop软件将属于每类特征的单位像素块拼成100×100像素的样本图像。将3类像素的样本图像分别投射到上述4种颜色空间中,对比发现根茬顶端切口在RGB颜色空间的所有分量通道下与行间秸秆和裸露地表的灰度差异都比较明显,如图2所示。但是这种明显差异仅存在于HSI空间的分量通道、YcbCr空间的分量通道和Lab空间的分量通道,因此选取RGB颜色空间用于完成玉米根茬行图像分割。
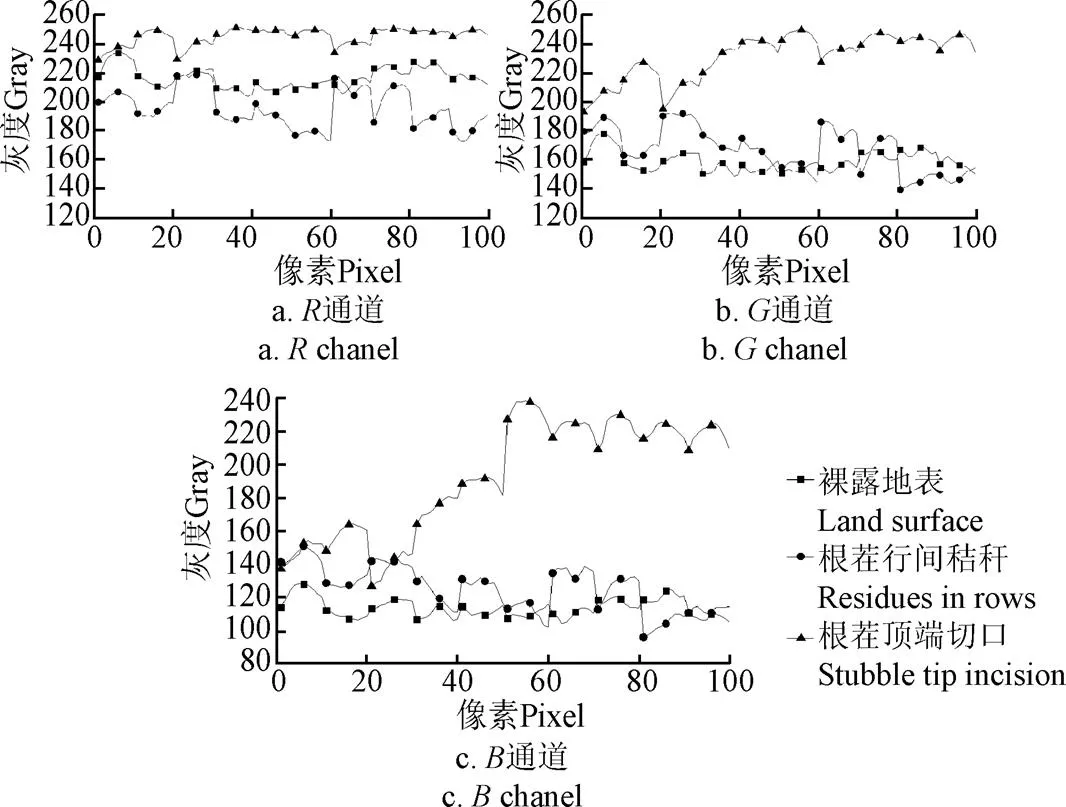
图2 样本图像在RGB各通道下的灰度分布
2.2 玉米根茬行感兴趣区域选取
由于玉米种植行距及摄像头视场设定等原因能基本保证采集的图像中仅包含一条完整的玉米根茬行(本研究中完整的玉米根茬行指图像采集时与摄像头相对的且与底边最接近垂直的根茬行),如图3a所示。为了降低分割难度,选取采集图像中间位置包含一条完整玉米根茬行的区域作为ROI。ROI选取方法:将以平均灰度值最大的像素列为中心列,并向两侧各取150个像素列的矩形区域作为玉米根茬行感兴趣区域,如图3b所示。
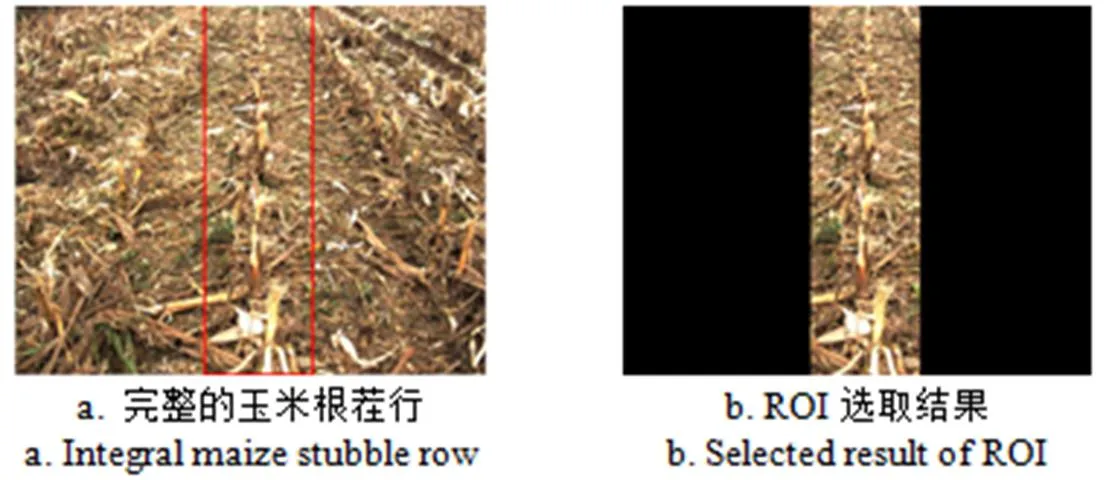
图3 玉米根茬行感兴趣区域选取过程
2.3 图像灰度化及分割
2.3.1 基于遗传算法的灰度化算子优化
作为一种常见的全局优化搜索算法,遗传算法通过对种群反复进行选择、交叉、变异操作产生新种群,并采用设计的适应度函数不断筛选优良个体,使种群向最优方向繁衍,最终求出最优解[24]。从图2可以看出,目标与背景灰度虽然接近,但仍有不同,因此通过遗传算法对灰度化算子的3个系数(,,)进行优化,以达到强化根茬顶端切口,抑制背景的目的,具体过程如下:
1)编码方式及种群数量
采用浮点数制编码方式,定义灰度化算子3个系数(,,)的取值范围如公式(1)所示,种群数量为50。
2)适应度函数设计
为增强根茬顶端切口和裸露地表或行间秸秆灰度的差异,采用相同适应度函数,分别获取可增强根茬顶端切口同时抑制裸露地表的灰度化算子,以及可增强根茬顶端切口同时抑制行间秸秆的灰度化算子。
利用种群中每个个体代表的灰度化算子分别处理根茬顶端切口、裸露地表和行间秸秆的样本图像。将根茬顶端切口和裸露地表或行间秸秆的灰度重叠率、均值差值和灰度图像方差作为评价指标,重叠率越小,越有利于灰度化根茬行图像,计算方式如下
式中p为重叠率,%;p为重叠区域的像素数;0为根茬顶端切口样本图像的灰度图像对应的总像素数;1为裸露地表或行间秸秆样本图像的灰度图像对应的总像素数。
均值差值越大,越有利于灰度化根茬行图像,计算方式如下
式中m为根茬顶端切口样本图像和裸露地表或行间秸秆样本图像各自灰度均值之间的差值;[01,02]和[11,12]为2类样本图像的灰度直方图范围;为第个直方图;0i和1i为2类样本图像各自第个直方图的概率;0和1分别为2类灰度图像对应的灰度直方图。
灰度方差越小,越有利于灰度化根茬行图像,计算方式如下
式中0为根茬顶端切口样本灰度图像的方差。
式中1为裸露地表或行间秸秆样本灰度图像方差。
通过赋予不同权重值的方式将上述评价指标构造成如下综合评价函数()

3)遗传算子及终止条件
遗传算子主要包括选择、交叉和变异,其中选择操作采取最优保存策略,交叉操作选取多点交叉,变异操作选择自适应变异,并设定最大迭代代数为50作为算法的终止条件。
以上述根茬顶端切口、行间秸秆及裸露地表3类像素的样本图像为样本,利用MATLAB软件按上述步骤对灰度化算子和进行了优化。最终选取最优系数为:p=-0.78,p=1,p=0.8,即灰度化算子为-0.78++ 0.8;q=-0.7,q=0.96,q=0.95,即灰度化算子为-0.7+ 0.96+0.95。、、分别代表彩色图像中某一像素点红、绿、蓝3个分量的灰度值,取值范围为[0, 255]。
分别利用灰度化算子和对玉米根茬行感兴趣区域进行灰度化处理,然后对两幅灰度图取平均得到最终的玉米根茬行感兴趣区域灰度图。
2.3.2 单阈值法分割
阈值法分割因具有计算方便,用时短,效率高的优点而得到广泛应用,但需选择合理的分割阈值[25-26]。利用灰度化算子处理根茬顶端切口和裸露地表的样本图像,灰度化算子处理根茬顶端切口和行间秸秆的样本图像,并对灰度化算子和分别处理后的根茬顶端切口灰度图像取均值,得到三者在同一坐标系下的灰度分布直方图。从图4可以看出,三者灰度虽仍有重叠,但裸露地表和行间秸秆的灰度值大部分都在150以下,而根茬顶端切口灰度值大多都在150以上,因此,选取分割阈值为150。
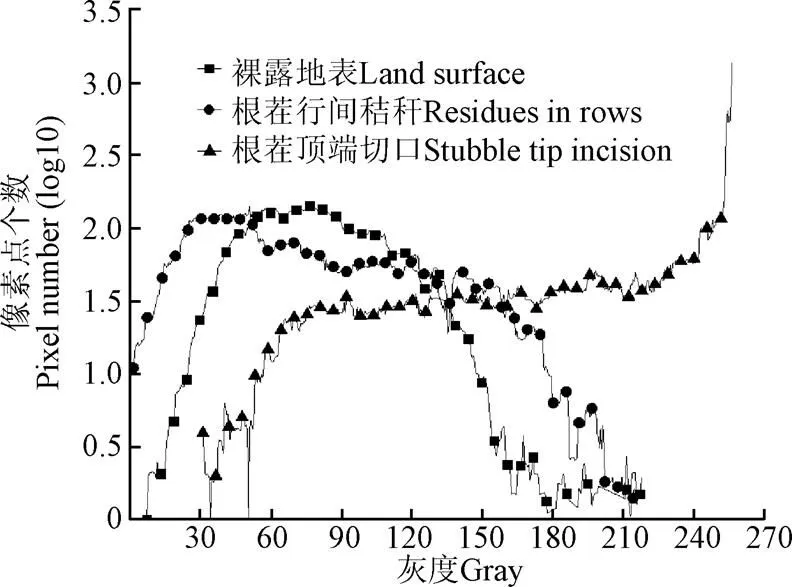
图4 样本图像灰度直方图
2.4 噪声滤除
2.4.1 形态学腐蚀处理
采用形态学滤波方法对分割结果进行优化,去除由于阈值误差造成的毛刺、孤立点及部分行间噪声等误分割情况[27-28]。本文在试验过程中选取形如矩阵的结构元素,通过腐蚀运算去除部分行间噪声和毛刺、清除孤立点以优化分割结果。
2.4.2 基于阈值的噪声滤除
经过腐蚀处理后的ROI二值图中,根茬行两侧仍然随机分布着部分颗粒状或块状噪声,且部分块状噪声与根茬顶端切口大小接近。为滤除这些噪声,结合连通域概念[29-31],提出一种基于阈值的噪声滤除方法。在二值化后的ROI中,连通域i包括连通域面积大于阈值a的根茬顶端切口类和连通域面积小于阈值a的噪声类,且根茬顶端切口类连通域集中分布在ROI中心列两侧一定距离o之内,噪声杂散地分布在ROI中心列一定距离o之外。综上,通过选择合理的面积阈值和偏距阈值对玉米根茬行两侧噪声进行滤除,其中连通域面积用其所包含的非零像素个数表示,偏距用连通域中心横坐标与感兴趣区域中心列横坐标差值的绝对值表示。
a和o的确定方法:将50幅样本图像经过形态学腐蚀运算处理后的ROI二值图作为统计样本,通过对比手动标记二值图中所有属于根茬顶端切口的连通域,计算并记录其连通域面积和中心点位置,得到根茬顶端切口连通域面积和偏距的分布图(图5),通过分析将a设为100,o设为30。
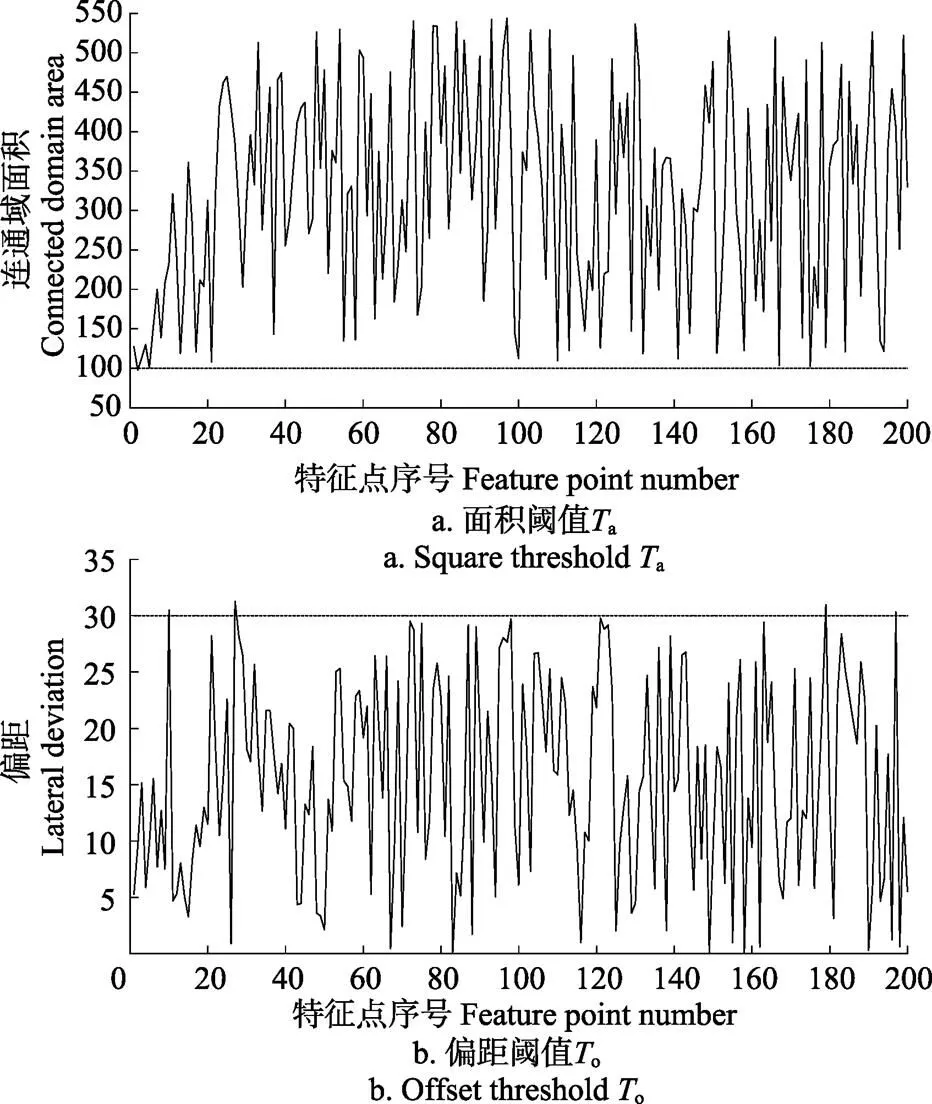
图5 阈值选取结果
3 玉米根茬行分割试验
3.1 试验环境
试验平台选择如下:硬件配置为Intel(R) Xeon(R) Silver 4116 CPU@2.10GHz,64GB RAM,NVIDIA Quadra P5000显卡的计算机;软件环境则采用Windows 10操作系统,在MATLAB 2018a 编程环境中实现。
3.2 玉米根茬行分割结果
试验测试图像为晴天强光条件和晴天弱光条件下拍摄的玉米利用联合收获机留茬收获后的玉米根茬行图像,每种条件各100幅,图像分辨率为1 280×1 024像素。每一幅图像上不仅包含了待分割的玉米根茬行,同时,还存在分布杂散且量不同的行间秸秆,地表裸露多或少、少量绿色杂草等复杂背景干扰。试验目标设计为,从玉米利用联合收获机留茬收获后的复杂背景图像中准确快速地分割出玉米根茬行。
另外,试验还选取了应用广泛的迭代法分割[32]、及OTSU法[33-34]替换本文分割过程中的单阈值法分割构成OTSU法分割等两种分割方法,与本文所提出的分割方法对玉米根茬行的分割效果进行对比。其中,OTSU法分割后无滤噪处理;迭代法分割选取彩度信息灰度化ROI,初始迭代分割阈值的估算值设为1=127,同时迭代法分割后也无滤噪处理。通过所选取的上述3种方法分别对强光条件和弱光条件下的试验图像进行处理,处理过程中获得的一些典型灰度图和分割结果图如图6、7所示,同时将对这些结果展开进一步分析。
为了客观评价本文所提出分割方法的有效性,选用平均相对目标面积误差率(average relative object area error,ARAE)来对图像分割质量进行定量评价[21],计算方式如下
式中表示第幅测试图像,表示测试图像的数量,值是100,1表示参考图像中目标区域的面积,2表示测试图像中目标区域的面积,目标区域的面积用区域内像素的个数表示,像素数通过MATLAB软件获得。参考图像由人工通过Photoshop手动分割获得,将图像中属于背景的像素标记为0,将图像中属于根茬行切口类的像素标记为255。平均相对目标面积误差率的取值范围都是0~100%,误差率的值越小表示分割效果越好,反之则分割效果越差。
4 结果与讨论
彩度灰度图像虽然能够有效区分玉米高留茬收获且行间无秸秆覆盖条件下的土壤与根茬,但在玉米利用联合收获机留茬收获后,且有行间秸秆覆盖的情况下,灰度化处理效果欠佳,根茬切口与裸露地表和行间秸秆对比度不明显,如图6b和7b所示。而本文通过遗传算法优化得到的灰度算子灰度化处理效果好,根茬切口区域得到增强,裸露地表和行间秸秆区域得到抑制,如图6c和7c所示。
迭代法分割能有效分割出高留茬收获且行间无秸秆覆盖条件下的玉米根茬,但在玉米利用联合收获机留茬收获后,且有行间秸秆覆盖的情况下,玉米根茬分割效果欠佳,如图6d和7d所示。OTSU法分割方法是常用的图像分割方法,但当地面背景复杂,目标与背景颜色非常接近时,易出现大面积目标误分割,分割效果不佳,如图6e和7e所示。根据迭代法和OTSU法分割原理推测造成二者分割效果不佳的原因是:采用迭代法或OTSU法分割对灰度化处理的根茬行图像进行分割时,虽然通过遗传算法优化得到的遗传算子进行灰度化处理时根茬切口区域得到增强,但由于目标(根茬顶端切口)和背景(行间秸秆、裸露地表)颜色接近,使得三者的灰度值差异不大,即灰度直方图不存在明显的“双峰”,不利于通过迭代法或OTSU法对根茬切口进行分割,造成采用迭代法或OTSU法分割玉米根茬行效果差。
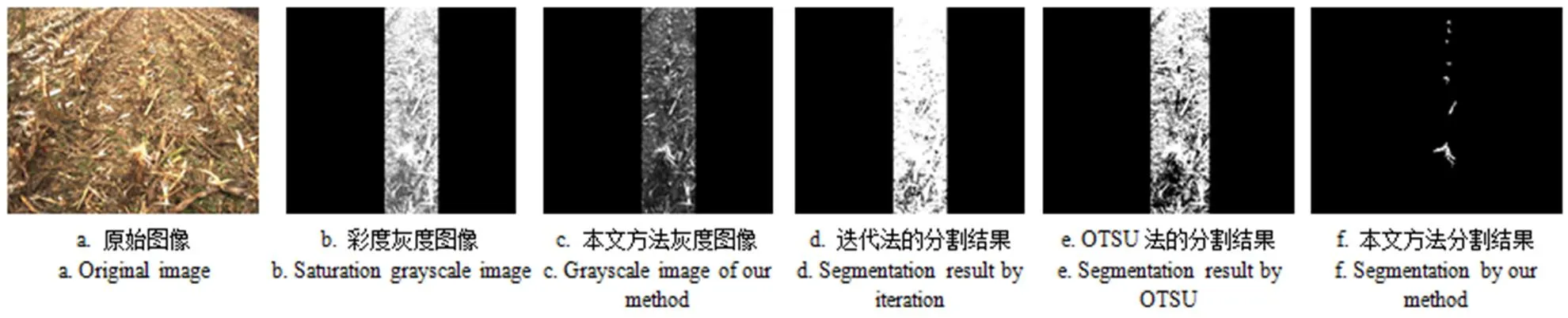
图6 晴天弱光条件下玉米根茬行图像的灰度图及分割结果
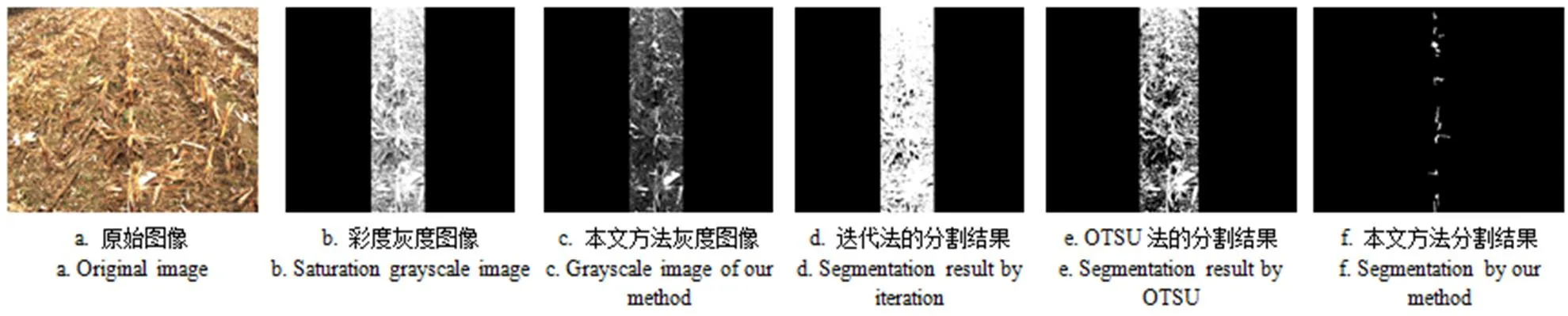
图7 晴天强光条件下玉米根茬行图像的灰度图及分割结果
与迭代法和OTSU法的分割结果相比,本文方法能够从大量行间秸秆、裸露地表等的复杂背景中准确分割出玉米根茬行,如图6f和7f所示。同时,本文方法能够比较有效地克服非均匀光照带来的强光点影响,如图7a中的太阳强光条件下仍取得良好的分割效果。
综上,从分割效果直观看出,本文方法能够在强光条件和弱光条件下,从玉米根茬行的复杂背景图像中,有效分割出玉米根茬行,对光照变化有较好的适应性。
表1展示了不同方法在晴天强光条件和晴天弱光条件下玉米根茬行图像分割的平均相对目标面积误差率,每一种都包含了100幅图像的平均结果。由于迭代法分割和OTSU法将行间秸秆和裸露地表等也误作为目标进行分割,使得测试图像目标区域面积远大于参考图像面积,造成平均相对目标面积误差率过高,迭代法(90.67%),OTSU法(86.42%)。从分割性能的平均指标上看,晴天弱光条件下的分割效果要比晴天强光条件下分割结果较好,说明强光照条件对3种算法的分割具有一定的影响。但从整体情况上看,本文方法在强光照条件和弱光条件下均有较好的分割效果,表明本文方法对晴天光照条件变化具有较好的适应能力。
表1同时展示了本文方法在200幅测试图像上的平均运行时间,从时间指标上看,本文方法相对于OTSU法要耗时一些,但时间花费不是太高,低于迭代法,实时性较好,且平均相对目标面积误差率远远低于迭代法分割和OTSU法分割。综上,从分割性能指标和运行时间上看,本文方法能够从复杂自然环境下分割出完整的玉米根茬行,具有较强的适应性和鲁棒性,实时性较好[33,35],分割准确率较高。
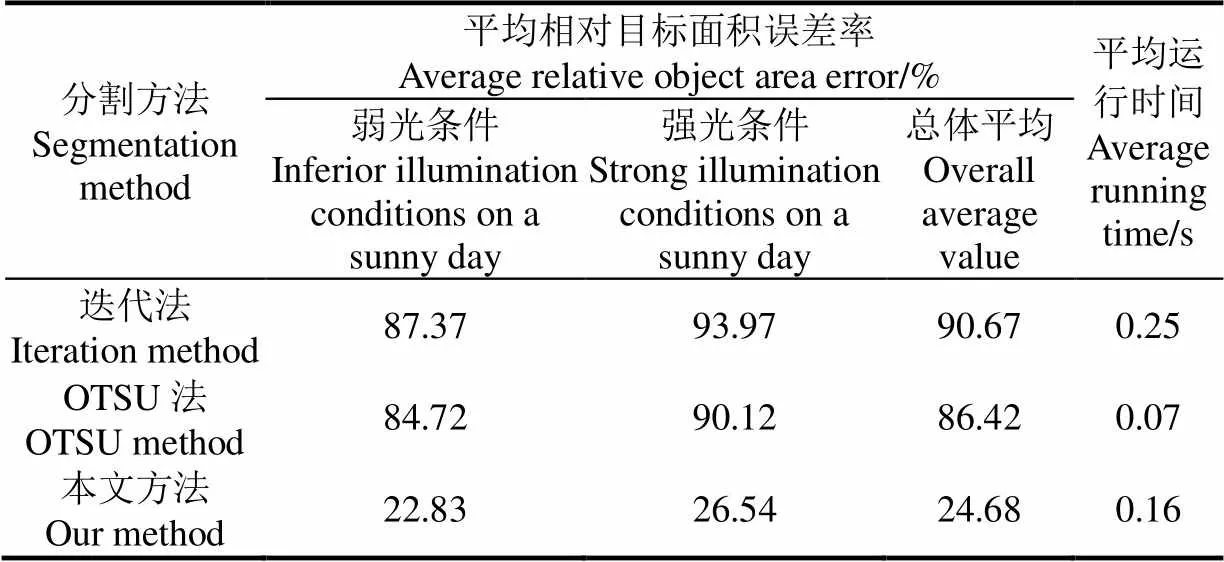
表1 不同方法分割玉米根茬行图像的性能指标
同时,本文方法也存在一些问题,如当行间秸秆大于等于面积阈值a且小于偏距阈值o,即行间秸秆也在根茬行上时,将会被视为玉米根茬切口并保留,如图8b所示。除此之外,后续将在本文研究基础上,探索能够提高玉米根茬行分割效率并降低分割误差的方法,如机器学习,以满足对行免耕播种作业的实时性和准确性。

注:矩形框用于标记采用本文方法处理根茬行图像时出现的误分割情况
5 结 论
本文提出了一种从玉米利用联合收获机留茬收获后的复杂背景下准确快速地分割玉米根茬行的方法,该方法选取RGB颜色空间,以根茬顶端切口为目标特征,通过ROI选取,遗传算法优化得到的灰度化算子灰度化处理ROI,单阈值法分割ROI,形态学腐蚀运算和基于阈值的噪声滤除方法滤除根茬行附近噪声,实现了玉米根茬行的准确快速分割。通过在强光条件和弱光条件下200幅玉米根茬行图像的试验分析表明:
1)本文方法对于光照变化具有一定的适应性,在强光条件和弱光条件下,均能较为准确的从玉米利用联合收获机留茬收获后的复杂背景中分割出玉米根茬行,最大平均相对目标面积误差率为26.54%(强光条件下)。
2)本文方法对玉米利用联合收获机留茬收获的图像分割具有较好的适应性和鲁棒性,能够将玉米根茬行从留茬收获后的复杂背景中较为准确快速地分割出来,平均相对目标面积误差率为24.68%,远远低于迭代法(90.67%)和OTSU法(86.42%)。
3)本文方法平均处理时间为0.16 s,低于迭代法(0.25 s),虽高于OTSU法(0.07 s),但平均相对目标面积误差率远低于OTSU法。从分割效果、平均相对目标面积误差率及平均处理时间等综合指标来看,本文方法对于分割玉米利用联合收获机留茬收获后的复杂玉米根茬行图像具有良好的效果。
[1] 姚宗路,王晓燕,李洪文,等. 2BMD-12型小麦对行免耕施肥播种机改进与试验研究[J]. 干旱地区农业研究,2005,23(5):46-51.Yao Zonglu, Wang Xiaoyan, Li Hongwen, et al. Modification and experiment on 2BMD-12 row-controlled no-till wheat drill[J]. Agricultural Research in the Arid Areas, 2005, 23(5): 46-51. (in Chinese with English abstract)
[2] 李兵,李洪文. 2BMD-12型小麦对行免耕播种机的设计[J].农业机械学报,2006,37(3):41-44. Li Bing, Li Hongwen. Design and study of 2BMD 12 no-till planter for wheat[J]. Transactions of the Chinese Society for Agricultural Machinery, 2006, 37(3): 41-44. (in Chinese with English abstract)
[3] 李洪文,王晓燕,李兵,等. 小麦对行免耕播种机试验研究[J]. 农机化研究,2004,9(5):179-181. Li Hongwen, Wang Xiaoyan, Li Bing, et al. A new-concept of no-till row-follow wheat planter[J]. Journal of Agricultural Mechanization Research, 2004, 9(5): 179-181. (in Chinese with English abstract)
[4] 李景彬,陈兵旗,刘阳. 棉花铺膜播种机导航路线图像检测方法[J]. 农业机械学报,2014,45(1):40-45. Li Jingbin, Chen Bingqi, Liu Yang. Image detection method of navigation route of cotton plastic film mulch planter[J]. Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(1): 40-45. (in Chinese with English abstract)
[5] 迟德霞. 水稻插秧机视觉导航系统设计与路径追踪试验[D]. 沈阳:沈阳农业大学,2015. Chi Dexia. Design on Machine Vision Navigation System of Rice Transplanter and Path Tracking Experimnet[D]. Shenyang: Shenyang Agricultural University, 2015. (in Chinese with English abstract)
[6] Leemans V, Destain M F. Application of the hough transform for seed row localisation using machine vision[J]. Biosystems Engineering, 2006, 94(3): 325-336.
[7] 赵颖,陈兵旗,王书茂,等. 基于机器视觉的耕作机器人行走目标直线检测[J]. 农业机械学报,2006,37(4):83-86.Zhao Ying, Chen Bingqi, Wang Shumao, et al. Fast detection of furrows based on machine vision on autonomous mobile robot[J]. Transactions of the Chinese Society for Agricultural Machinery, 2006, 37(4): 83-86. (in Chinese with English abstract)
[8] García-Santillán I D, Montalvo M, Guerrero J M, et al. Automatic detection of curved and straight crop rows from images in maize fields[J]. Biosystems Engineering, 2017, 156: 61-79.
[9] Zhang Qin, Chen M E, Shaojie, LI Bin. A visual navigation algorithm for paddy field weeding robot based on image understanding[J]. Computers & Electronics in Agriculture, 2017, 143(10): 66-78.
[10] 艾长胜,林洪川,武德林,等. 葡萄园植保机器人路径规划算法[J]. 农业工程学报,2018,34(13):77-85.Ai Changsheng, Lin Hongchuan, Wu Delin, et al. Path planning algorithm for plant protection robots in vineyard[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(13): 77-85. (in Chinese with English abstract)
[11] 张志斌,罗锡文,臧英,等. 基于颜色特征的绿色作物图像分割算法[J]. 农业工程学报,2011,27(7):183-189.Zhang Zhibin, Luo Xiwen, Zang Ying, et al. Segmentation algorithm based on color feature for green crop plants[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2011, 27(7): 183-189. (in Chinese with English abstract)
[12] 梁习卉子,陈兵旗,姜秋慧,等. 基于图像处理的玉米收割机导航路线检测方法[J]. 农业工程学报,2016,32(22):43-49.Liangxi Huizi, Chen Bingqi, Jiang Qiuhui, et al. Detection method of navigation route of corn harvester based on image processing[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(22): 43-49. (in Chinese with English abstract)
[13] 赵腾,野口伸,杨亮亮,等. 基于视觉识别的小麦收获作业线快速获取方法[J]. 农业机械学报,2016,47(11):32-37.Zhao Teng, Noboru Noguchi, Yang Liangliang, et al. Fast edge detection method for wheat field based on visual recognition[J]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(11): 32-37. (in Chinese with English abstract)
[14] 李景彬,陈兵旗,刘阳,等. 采棉机视觉导航路线图像检测方法[J]. 农业工程学报,2013,29(11):11-19.Li Jingbin, Chen Bingqi, Liu Yang, et al. Detection for navigation route for cotton harvester based on machine vision[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2013, 29(11): 11-19. (in Chinese with English abstract)
[15] 孟庆宽,张漫,仇瑞承,等. 基于改进遗传算法的农机具视觉导航线检测[J]. 农业机械学报,2014,45(10):39-46. Meng Qingkuan, Zhang Man, Qiu Ruicheng, et al. Navigation line detection for farm machinery based on improved genetic algorithm[J]. Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(10): 39-46. (in Chinese with English abstract)
[16] 孔玲君,曾茜,张雷洪,等. 基于遗传算法选择多光源下的光谱反射率重构研究[J]. 光谱学与光谱分析,2019,39(4):1162-1168.Kong Lingjun, Zeng Xi, Zhang Leihong, et al. Research on spectral reflectance reconstruction based on genetic algorithm for selecting multi-illum[J]. Spectroscopy and Spectral Analysis, 2019, 39(4): 1162-1168. (in Chinese with English abstract)
[17] 于潇宇,郭玉波,陈刚,等. 基于点目标连通域标记的实时特征提取及其分布式运算[J]. 光学学报,2015,35(2):104-114.Yu Xiaoyu, Guo Yubo, Chen Gang, et al. Real-time point feature extraction based on connectedcomponents labeling and distributed computing[J]. Acta Optica Sinica, 2015, 35(2): 104-114. (in Chinese with English abstract)
[18] Jeong J, Lee G, Lee M, et al. A single-pass connected component labeler without label merging period[J]. Journal of Signal Processing Systems, 2016, 84(2): 211-223.
[19] 丁幼春. 联合收获机视觉导航关键技术研究[D]. 北京:中国农业大学,2010.Ding Youchun. The Key Technology of Vision Navigation in Combine Harvester[D]. Beijing: China Agricultural University, 2010. (in Chinese with English abstract)
[20] 孟庆宽. 基于机器视觉的农业车辆—农具组合导航系统路径识别及控制方法研究[D]. 北京:中国农业大学,2014.Meng Qingkuan. Methods of Navigation Control and Path Recognition in the Integrated Guidance System of Agricultural Vehicle and Implemnet Based on Machine Vision[D]. Beijing: China Agricultural University, 2014. (in Chinese with English abstract)
[21] 刘立波,程晓龙,戴建国,等. 基于逻辑回归算法的复杂背景棉田冠层图像自适应阈值分割[J]. 农业工程学报,2017,33(12):201-208.Liu Libo, Cheng Xiaolong, Dai Jianguo, et al. Adaptive threshold segmentation for cotton canopy image in complex background based on logistic regression algorithm[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(12): 201-208. (in Chinese with English abstract)
[22] 贺付亮,郭永彩,高潮,等. 基于视觉显著性和脉冲耦合神经网络的成熟桑葚图像分割[J]. 农业工程学报,2017,33(6):148-155.He Fuliang, Guo Yongcai, Gao Chao, et al. Image segmentation of ripe mulberries based on visual saliency and pulse coupled neural network[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(6): 148-155. (in Chinese with English abstract)
[23] Gonzalez R C, Woods R E, Eddins S L, 等. 数字图像处理[M].北京:电子工业出版社,2013.
[24] 陈黎卿,李艳,曹成茂,等. 基于遗传算法的山区微型播种施肥机减振优化设计[J]. 农业工程学报,2015,31(3):17-22.Chen Liqing, Li Yan, Cao Chengmao, et al. Optimization design for vibration reduction of micro planter and fertilizer machinery used in mountain area based on genetic algorithm[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(3): 17-22. (in Chinese with English abstract)
[25] 刘媛媛,王跃勇,于海业,等. 基于多阈值图像分割算法的秸秆覆盖率检测[J]. 农业机械学报,2018,49(12):27-35,55. Liu Yuanyuan, Wang Yueyong, Yu Haiye, et al. Detection of straw coverage rate based on multi-threshold image segmentation algorithm[J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(12): 27-35,55. (in Chinese with English abstract)
[26] 高国琴, 李明. 基于K-means算法的温室移动机器人导航路径识别[J]. 农业工程学报,2014,30(7):25-33.Gao Guoqin, Li Ming. Navigating path recognition for greenhouse mobile robot based on K-means algorithm[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2014, 30(7): 25-33. (in Chinese with English abstract)
[27] 毕昆,姜盼,李磊,等. 基于形态学图像处理的麦穗形态特征无损测量[J]. 农业工程学报,2010,26(12):212-216.Bi Kun, Jiang Pan, Li Lei, et al. Non-destructive measurement of wheat spike characteristics based on morphological image processing[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2010, 26(12): 212-216. (in Chinese with English abstract)
[28] 吕谷来,李建平,李锵,等. 基于机器视觉的砧木定位识别方法[J]. 浙江大学学报工学版,2011,45(10):1766-1770.Lv Gulai, Li Jianping, Li Qiang, et al. Method for rootstock position recognition based on machine vision[J]. Journal of Zhejiang University Engineering Science, 2011, 45(10): 1766-1770. (in Chinese with English abstract)
[29] 李毅念,杜世伟,姚敏,等. 基于小麦群体图像的田间麦穗计数及产量预测方法[J]. 农业工程学报,2018,34(21):185-194.Li Yinian, Du Shiwei, Yao Min, et al. Method for wheatear counting and yeild predicting based on image of wheatear population in field[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(21): 185-194. (in Chinese with English abstract)
[30] Zhu Yanjun, Cao Zhiguo, Lu Hao, et al. In-field automatic observation of wheat heading stage using computer vision[J]. Biosystems Engineering, 2016, 143: 28-41.
[31] Fernandez-Gallego J A, Kefauver S C, Gutiérrez N A, et al. Wheat ear counting in-field conditions: High throughput and low-cost approach using RGB images[J]. Plant Methods, 2018, 14(1): 1-12.
[32] 陈媛. 基于机器视觉的秸秆行茬导航路径的检测研究[D]. 北京:中国农业大学,2008. Chen Yuan. Detection of Stubble Row for Machine Vision Guidance in No-till Field[D]. Beijing: China Agricultural University, 2008. (in Chinese with English abstract)
[33] 王见,周勤,尹爱军. 改进Otsu算法与ELM融合的自然场景棉桃自适应分割方法[J]. 农业工程学报,2018,34(14):173-180. Wang Jian, Zhou Qin, Yin Aijun. Self-adaptive segmentation method of cotton in natural scene by combining improved Otsu with ELM algorithm[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(14): 173-180. (in Chinese with English abstract)
[34] Guerrero J M, Ruz J J, Pajares G. Crop rows and weeds detection in maize fields applying a computer vision system based on geometry[J]. Computers & Electronics in Agriculture, 2017, 142: 461-472.
[35] 傅隆生,冯亚利,Elkamil Tola,等. 基于卷积神经网络的田间多簇猕猴桃图像识别方法[J].农业工程学报,2018,34(2):205-211.Fu Longsheng, Feng Yali, Elkamil Tola, et al. Image recognition method of multi-cluster kiwifruit in field based on convolutional neural networks[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(2): 205-211. (in Chinese with English abstract)
Image segmentation of maize stubble row based on genetic algorithm and threshold filtering noise
Wang Chunlei, Lu Caiyun, Chen Wanzhi, Li Hongwen※, He Jin, Wang Qingjie
(1.100083; 2.(),,100083)
Green crop is generally used as the foreground in image segmentation of agricultural visual navigation system because of its obvious chromaticity difference from the basic image background. However, for the segmentation of maize stubble row, there are many backgrounds in the field harvested by combine harvester, such as naked land surface, maize residues, which has little color difference with the maize stubble row. To achieve accurate and quick segmentation of maize stubble row, an image segmentation approach of maize stubble row based on genetic algorithm and threshold filtering noise was proposed in this paper. Firstly, the RGB color space was selected to accomplish the segmentation, which is a basic color space and widely used in machine vision automatic guidance systems. Secondly, to reduce the difficulty of image segmentation, the region of interest (ROI) was selected by calculating the maximum of column gray value accumulation. Thirdly, the gray-scale image of the maize stubble row was obtained through the optimized gray-scale operator. Besides, the genetic algorithm was often used in global optimization, which was used to optimize the gray-scale operator. Specially, the maize stubble row image’s pixel was divided into 3 classes: land surface, residues in rows and stubble tip incision, and the 3 classes were selected as the sample to optimize the gray-scale operator by genetic algorithm. Then, the segmentation of single threshold method was used to segment the gray-scale image. Furthermore, the segmentation of single threshold method is widely used in image segmentation because of its high efficiency and convenience. Lastly, the morphological corrosion treatment (MCT) and threshold noise filtering algorithm (TNFA) were applied to guarantee the integrity of the maize stubble row region and the noise points on both sides of the maize stubble row removal. In order to verify the effect of the method proposed in this paper, 200 test images were captured from Scientific Observing and Experimental Station of Arable Land Conservation (North Hebei),Ministry of Agriculture in Baoding City, China in each October during 2014-2016. The acquisition was often on sunny day, aiming at collecting images under different natural lighting conditions, different positions in maize stubble row field. The results showed that the average relative object area error (ARAE) by our method was only 24.68%, while the AREA of the iteration method and the OTSU method were 90.67% and 86.42%, respectively. The average processing time of a test image based on this paper presented algorithm was 0.16 s, which was much more time-consuming than the OTSU method (0.07 s), while the processing time of our method was less than the iteration method (0.25 s). Therefore, the method presented in this paper achieved better performance than other methods in maize stubble row segmentation, and was effective to segment the maize stubble row in the complicated backgrounds. The presented method can provide precise basis for detection of guidance line in maize straw covering field.
image segmentation; machine vision; genetic algorithm; threshold filtering noise; maize stubble row
2019-06-25
2019-07-31
公益性行业(农业)科研专项(201503136)
王春雷,博士生,主要从事现代农业装备与计算机测控技术研究。Email:chlwang@cau.edu.cn
李洪文,教授,主要从事现代农业装备与计算机测控技术研究。Email:lhwen@cau.edu.cn
10.11975/j.issn.1002-6819.2019.16.022
TP391.4
A
1002-6819(2019)-16-0198-08
王春雷,卢彩云,陈婉芝,李洪文,何 进,王庆杰. 基于遗传算法和阈值滤噪的玉米根茬行图像分割[J]. 农业工程学报,2019,35(16):198-205. doi:10.11975/j.issn.1002-6819.2019.16.022 http://www.tcsae.org
Wang Chunlei, Lu Caiyun, Chen Wanzhi, Li Hongwen, He Jin, Wang Qingjie. Image segmentation of maize stubble row based on genetic algorithm and threshold filtering noise[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(16): 198-205. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2019.16.022 http://www.tcsae.org
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
河北果树(2022年1期)2022-02-16
汽车工程(2021年12期)2021-03-08
天津医科大学学报(2021年1期)2021-01-26
中国果业信息(2020年6期)2020-12-16
中国信息技术教育(2020年2期)2020-02-02
电子制作(2019年16期)2019-09-27
东坡赤壁诗词(2019年1期)2019-04-30
电子制作(2019年24期)2019-02-23
中老年健康(2016年9期)2016-11-18