基于机载LiDAR点云制作DEM及等高线的方法
2019-10-12 04:00秦佩阳林书范张道轻
资源导刊(信息化测绘) 2019年9期
秦佩阳 林书范 张道轻
(1.河南省遥感测绘院,河南 郑州 450003;2.海口弘勘地理信息有限公司,海南 海口 570226;3.河南省征地储备中心,河南 郑州 450016)
1 引言
机载LiDAR 系统是集激光、全球定位系统(GPS)和惯性导航系统(IMU)技术于一体的空间测量系统[1],不受日照和天气条件限制,能全天候对地观测。机载激光雷达传感器发射的激光脉冲能部分穿透树林遮挡,获取地面的高精度三维信息,在灾害监测、资源勘查、森林调查、地形测绘等领域得到广泛应用。以此为基础制作的DEM 数据具有表达地貌细微、精度高的优点,成为国内外获取DEM 的主要手段。本文基于机载LiDAR点云简单分类,利用软件对其进行精细分类后获得地面点点云,制作高精度DEM,并对高精度DEM 反生出来的等高线进行处理,以满足万分之一制图要求。
2 总体技术方案
对LiDAR 点云预处理后的地表点进行人工精细分类,提取精细分类后地面点云进行高精度DEM 的构建与输出;针对不同地形DEM 反生的等高线,经过综合处理,满足地形图制图要求。具体作业流程如图1 所示。
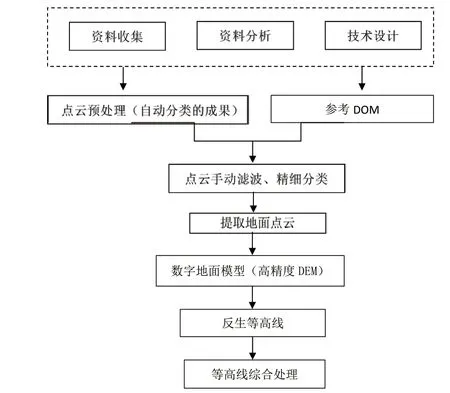
图1 高精度DEM及等高线处理流程图
3 点云精细分类及高精度DEM 构建
3.1 点云分类软件和精细分类方法
3.1.1 TerraSolid 软件介绍
TerraSolid 系列软件是第一套商业化的LiDAR 数据处理软件,基于MicroStation 开发运行[2]。利用TerraSolid 中 的TerraScan、TerraModel 模 块 处 理LiDAR 点云数据,通过自动滤波、手动精细分类,设定阈值,去除各种噪声和误差点,寻找地面点。提取地面点是最重要的操作步骤,即滤掉非地面点的回波信号所产生的数据,如房屋、植被、交通工具及桥梁等,以得到更加贴近地表的地面点。
3.1.2 滤波基本原理
滤波的基本原理是基于真实地面与地物高程差异,针对相邻点或点集之间的高程差,通过构建“网格”范围并采取一定的规则进行运算,把混合在一起的属于不同对象的点区分开来,特别是地面点与非地面点。
3.1.3 点云预处理
测量过程中因仪器误差和被测对象的物理特性不免会混有噪声点,相比激光点总数,噪声点数目极少,但多数滤波算法都是以高程突变为理论依据进行滤波,最低点默认为地面点,如果噪声点没有被去除将影响滤波效果,因此在精细分类前去除噪声点非常必要。
3.1.4 点云精细分类方法
经过预处理后的点云数据含地面点、植被点、建筑物点、水域点、桥点等,原始点云均在同一数据层。精细分类是将这些点分类归属至预先定义的正确数据层中,如地面点放在ground 层、植被点放在vegetation 层、建筑物点放在building 层等,其中重点是分出地面点,生成高精度DEM。常用滤波分类方法有数学形态学法、基于地形坡度法和基于不规则三角网的滤波算法。
(1)数学形态学法
Lindenberger 最早提出采用数学形态学法对激光点云数据进行开运算,然后通过自回归过程改善开运算结果,自回归运算要求激光点有序排列,适合处理有序的激光点数据[3]。目前,形态学算法应用于许多图形图像处理软件,这些软件在数据处理时常将数据规格格网化,从而导致信息损耗,特别是在地面点和地物点间进行内插,得出的高程值在地面点与地物点之间,让内插的高程数据相比实际数据更平滑。但在地形特征信息明显区域,如山顶、山脊线、山谷线等处,这一方法将弱化地形特征信息,使滤波分类更困难。
(2)基于地形坡度法
该算法基本思想是基于非地形坡度引起的两相邻点与高程差异有关的坡度值,认定其中较高的点是非地面点。在高差一定的情况下,随着两点间距离的减小,较高点是地面点的可能性也减小。该方法根据一个可接受的两点间的高程差,构造两点间的距离函数的函数。因此,两点之间的阈值Δhmax(d)可以利用两点间的距离来定义,即滤波函数如公式(1)所示。

公式(1)中,s 是可容许的最大地形坡度百分数;d 是两点之间的距离;δz 为标准偏差。
(3)基于不规则三角网的滤波算法
该算法滤波的主要流程是先将点云数据进行分块处理(分块大小通常以测区最大地物尺寸为准),然后在块中选取一些高程较低的点,作为原始地面点用于构建初始三角网[4]。构建好初始三角网后对非地面点P 进行判断,如果该点到其对应三角形的距离d 以及点到三角形三个顶点之间的角度α、β、γ 均小于给定的阈值(如图2 所示),那么该点为地面点,将该点加入初始地面点集中并重新构建TIN。然后继续对剩余点进行判断,经过不断迭代,遍历完所有的点,直至待判断点集中不再出现满足距离与角度阈值的点。
TerraSolid 软件中的TerraScan 模块对激光雷达数据的滤波采用的就是基于不规则三角网的滤波算法,通过不断建立三角网的过程筛选出地面点。
3.2 构建高精度DEM
利用TerraScan 精细分类后,将关键地面点(Ground)、水点(Water)作为特征点,带有高程信息的面状水域范围线和河流边线作为特征线,采用双线性多项式内插方法构建规则三角网,从而生产高精度DEM(如图3 所示)。

图2 不规则三角网滤波算法中的参数
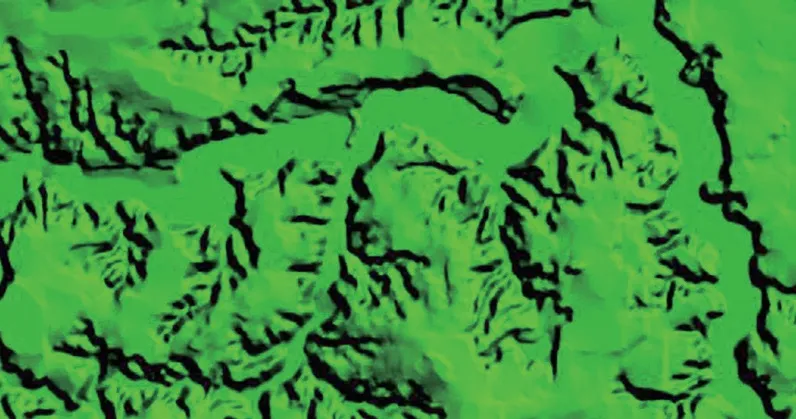
图3 高精度DEM
4 DEM 反生等高线及综合处理
4.1 DEM 反生的曲线存在的问题
地形图制图要求等高线满足精度的同时,曲线光滑,但作业中DEM 反生的等高线,尤其是平地1 米等高距的等高线存在抖动、锯齿状、尖锐角、综合取舍难、主次难分的情况(如图4 所示),需作业人员进行分析。
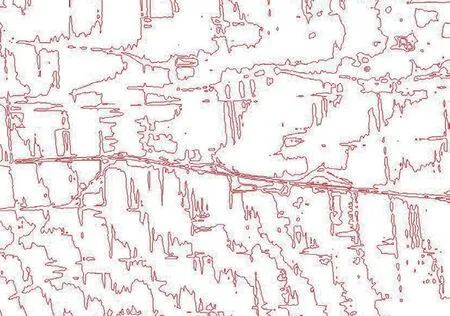
图4 初始反生的等高线
4.2 MapMatrix 中DEM 编辑功能介绍
利用航天远景MapMatrix 中的DEM 编辑模块对原始DEM 进行局部平滑或全局平滑,根据不同地形设定不同的平滑度(1 ~12)(如图5 所示),对平地可以适当加大平滑度,以满足精度和制图要求,丘陵山地不能平滑太厉害,以免山头被消掉。
DEM 平滑后进行精度验证,反生曲线和原始曲线对比不能超过半个等高距。经过上述处理后,图6 显示,处理前后等高线中心位置没有发生偏移,主次分明,美观圆滑,满足制图要求。

图5 DEM平滑界面
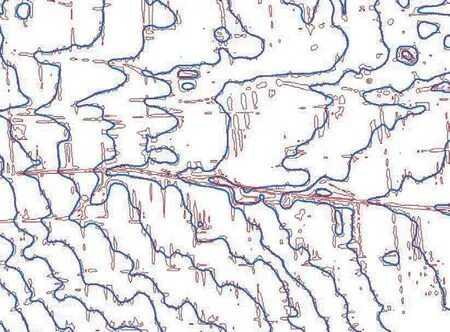
图6 DEM平滑前后等高线精度对比
5 结语
基于机载LiDAR 点云制作DEM 及等高线的方法可以对局部地貌进行有效处理,与传统航测立体采集相比,大大减轻了工作量,为完成河南省LiDAR 航摄生产DEM 及万分之一基础测绘地貌更新工作提供了借鉴和经验。
猜你喜欢
军民两用技术与产品(2022年1期)2022-06-01
资源信息与工程(2021年5期)2022-01-15
当代陕西(2020年23期)2021-01-07
西部论丛(2020年1期)2020-10-13
广东教学报·教育综合(2019年87期)2019-09-10
测绘通报(2019年1期)2019-02-15
电子制作(2018年17期)2018-09-28
智富时代(2018年8期)2018-09-28
智富时代(2018年8期)2018-09-28
消费导刊(2017年8期)2018-01-18