基于GNSS后差分技术航测系统在大比例尺地形图测绘中的应用
2019-10-12 04:00李勇
资源导刊(信息化测绘) 2019年9期
李勇
(新疆维吾尔自治区第二测绘院,新疆 乌鲁木齐 830000)
1 引言
无人机低空遥感作为一种新型高效的影像获取技术,具有使用便捷、机动灵活、时效性强等优势,是卫星遥感和大飞机航空摄影的有力补充[1]。目前,轻小型无人机在农村土地确权、灾害应急监测、自然资源调查、国土空间规划、矿山测绘等领域应用广泛[2-4],正逐步成为获取空间地理信息的重要手段。
GNSS辅助航空摄影测量在测绘行业有着重要地位,尤其是GNSS 后差分技术的逐渐成熟与应用,为航空摄影测量提供了更加高效的手段[5]。无人机后差分技术的特点是能够获取高精度的摄站点三维坐标,用高精度的POS 数据辅助空三加密,可减少野外像控点数量,提高工作效率,降低作业成本[6-7]。本文基于GNSS 后差分技术,用CW-30 大鹏无人机进行大比例尺测图,研究GNSS 后差分辅助空三的像控点布设方案和GNSS后差分辅助空三加密技术流程,为无人机完成大比例尺航空摄影测量提供依据。
2 CW-30 大鹏简介
CW-30 大鹏垂直起降固定翼无人机采用油电混合动力,性能稳定,携带方便,续航能力和任务载荷能力强,在城市规划、灾害监测、水利设计、文物保护等领域有着重要作用。CW-30 无人机参数如表1 所示。
3 项目应用
3.1 航摄计划
航测设备采用CW-30 固定翼无人机搭载尼康D810相机,并配套PPK 模块一体作业。测区面积约4.782km2,成图比例尺为1∶1000,平面坐标系统采用2000 国家大地坐标系,中央子午线为东经114°,高程系统采用1985 国家高程基准。航摄范围和航线示意图如图1 所示,航摄技术参数如表2 所示。
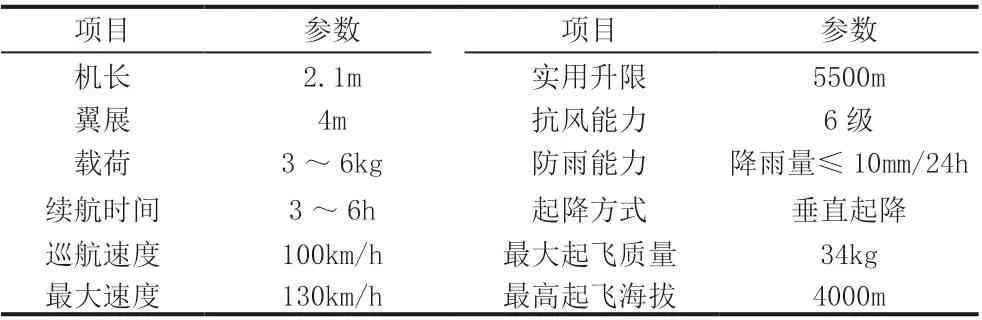
表1 CW-30无人机参数

图1 航摄范围及航线示意图

表2 CW-30航摄技术参数
3.2 数据获取
航测工作中,兼顾测图精度和生产成本,通过改变布点的航向间隔和旁向间隔设置最佳像控点布设方案,根据测区实际规划航线,设置合适的飞行高度和影像重叠度等参数,按航线飞行获取影像数据。
3.3 数据处理
数据处理包括坐标影像数据预处理、空三加密和数字化产品制作。
3.3.1 坐标影像数据预处理
检查坐标影像和POS 坐标文件的完整性和逻辑一致性,将POS 数据大地坐标转换为CGCS2000 坐标,利用航空摄影测量软件对航测影像进行畸变改正、匀光匀色和影像匹配等预处理。
3.3.2 GNSS 后差分POS 辅助空三
后差分POS 辅助空三技术流程:航测数据经过畸变改正、坐标转换、刺像控点后,通过GNSS 后差分辅助区域网平差等处理,计算出每张像片的位置、姿态等6 个外方位元素,完成空三加密。输出加密成果后检查所有像控点的精度和模型连接差。技术流程如图2 所示。通过采集密集控制点进行空三区域网平差,解算每张像片设站坐标以此作为真值,与初始POS 和后差分POS 对比,精度分析统计如表3 所示。

图2 空三加密处理流程

表3 后差分POS精度分析统计(单位:m)
3.3.3 数字化产品制作
数字化产品生产包括DEM、DOM、DLG 制作。使用无人机低空遥感数据处理软件进行照片对齐、自动像点匹配、不合格点剔除、照片深度匹配、建立密集点云、生成网格和纹理等,获得高密度点云、高分辨率DOM 和DEM(如图3 所示)。然后利用高密度点云生成等高线和高程点,叠加正射影像、DEM 采集地物,进行等高线编辑、地物绘制地形图生产(如图4 所示)。

图3 DEM和DOM成果

图4 DLG线划图成果
3.4 数据检核与精度分析
根据《数字航空摄影测量空中三角测量规范》(GB/T 23236—2009)的相关规定,我国现行空中三角测量区域网平差误差标准如表4 所示。

表4 丘陵地区基本定向点残差、检查点误差、公共点较差最大限值(单位:m)
检查点的平面中误差、高程中误差按公式(1)计算:

公式(1)中,m1为检查点中误差,Δ 为检查点野外实测值与解算值误差,n 为参与评定精度的检查点数。
依据相关规范要求,在测区均匀 选取50 个有明显特征的地面检核点,包括房角、道路、干沟、池塘等地物设施,对不引入控制点的空三加密成果进行误差统计,平面位置误差检查方法主要是在DOM 数据上采集平面坐标,高程误差则通过三维模型采集高程值。最后与实地采集的坐标进行对比,分别计算平面位置中误差与高程中误差。坐标检核统计如表5 所示,计算结果如表6 所示。
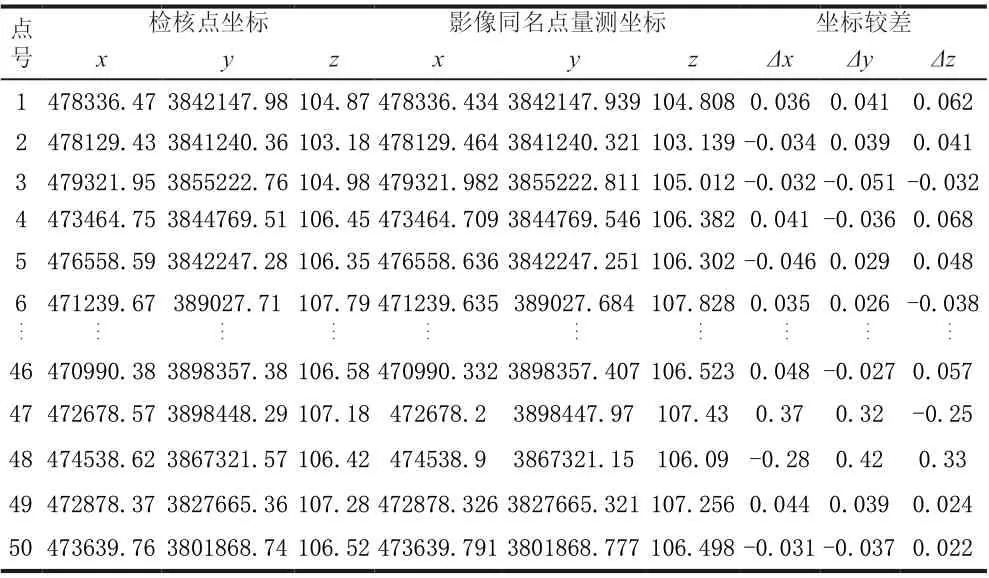
表5 坐标检核统计表(单位:m)

表6 坐标精度统计表(单位:m)
结果显示,根据《基础地理信息数字成果1∶500、1∶1000、1∶2000 数字线划图》,在平地、丘陵地区,1∶1000 比例尺的DOM 明显地物点的平面位置中误差不应大于0.6m,DEM 检核点的中误差不应大于0.2m,在不引入控制点情况下生成的正射影像图和三维模型精度完全满足规范要求,中误差及最大误差均没有超过限差值,满足大比例尺测图要求。
4 结语
本文将GNSS 后差分技术应用于CW-30 大鹏固定翼无人机航测,并进行GNSS 后差分辅助空中三角测量试验,得出结论:(1)CW-30 大鹏无人机航测采用GNSS 后差分辅助空中三角测量的结果能满足1∶1000 成图比例尺的空三精度要求。(2)GNSS 后差分辅助空三的方法极大减轻了像控点野外测量工作量,缩短了航摄到完成加密的时间,提高了效率,节约了成本。
猜你喜欢
——以大班艺术领域为例
今天(2022年20期)2022-12-16
资源信息与工程(2021年5期)2022-01-15
今日健康(2021年5期)2021-12-01
全球定位系统(2021年3期)2021-08-07
理论与创新(2020年15期)2020-10-09
辽宁省博物馆馆刊(2020年0期)2020-08-13
装饰装修天地(2020年7期)2020-06-01
航空知识(2019年1期)2019-01-11
企业科技与发展(2018年5期)2018-09-10
环球飞行(2018年7期)2018-06-27