
工业机器人视觉系统的可靠定位分析
2019-10-21 19:21马佳誉
装备维修技术 2019年5期
马佳誉

摘要: 科技发展推动了时代的变迁,机器人被大量生产出来,同时机器人的出现也在相当大的程度上解放了很多领域的部分工作环节,相比较人工,机器人能够完成的工作效率更高。但是机器人也存在自身的弊端那就是接受周围信号的感官是不存在的不能根据外界信息的变化来调整自己的工作状态和环节,使得在某些环节中,由工业机器人负责的工业生产质量和精度还得不到保障。所以将视觉系统安装到工业机器人内部,提高机器人对外界信息的感知能力和视觉能力,进而提高机器人的实用性、灵活性是很有必要的。本文介绍了计算机视觉系统对机器人的意义、系统的构成和运作的原理。通过将计算机视觉系统安装在工业机器人内部,从而实现机器人的对物体的定位功能,继而能够完成识别、跟踪、搬运等一系列功能。
关键词: 工业机器人;视觉系统;定位
引言
计算机视觉系统的设计和研发是为了更好地为工业机器人服务,它的本质是发挥摄像机定位以及跟踪性功能,很多企业在自身生产环节依赖于机器人,生产效率明显得到改善。然而很多机器人的工作模式是半自动的,需要在人工操控的指引下才能完成工作任务,这使得机器人的实用性和适应性较差,无法彻底解放人工,实现自动化操作。为了提高机器人接收外界信息、感知外界信息的能力,进一步提高机器人的工作效率,保障工业生产的精度和质量,在以往的机器人系统中新增全新的计算机视觉系统,通过视觉系统捕捉的外界信息,对图像进行分析识别,继而让机器人能够识别外界信息,然后再全面分析图像的基础上完成后续的重建和精准化计算,通过一系列的重建以及精准化的计算全面应用机器人控制柜通讯等等设备,完成全面的掌控工作。实现机器人对外界信息的跟踪功能和定位功能。
系统的结构与原理
本文选取的研究对象是Motornan UP6工业机器人系统,在以往的系统内,再将计算机视觉系统嵌入到工业机器人内部,从而提高机器人识别外界信息的能力。此套视觉系统的组成部分包括了工控机、OK c一50图像采集卡等外部设备。工学机器人的全系统包含了以往存在的原有系统以及新增的计算机视觉系统。图像采集系统能够采集外界物体的信息图像,接着会分三步对采集的图像进行处理、计算、变换和通信,继而来给工控机下达指令,操纵工业机器人。
计算机视觉系统的构建
硬件的组成
如图1。CCD摄像头的像素用p表示,其具体参数如下:500(H)x582(V),N:510(H)x 492(v)。摄像机的成像器使用1‘33“CCD信噪>48dB,此外,CCD摄像头的优点众多,在背景阴暗时,它会对背景进行自动补光,且具备自动增益控制功能。
图像采集卡:采集卡的构成部件有CCD摄像头以及与摄像头配套使用的MV 200工业图像处理。MV一200图像采集卡的优点是采集的图像高清,分辨率好。其部件展示如下图2:
MV一200图像采集卡的稳定性是非常不错的,其采集的图像不仅像素高,质量好,画面效果也是非常顺畅,完全不卡顿。该卡的硬件质量也有所保障、地层函数也较为稳定,即使在不友好的工作环境中,它依旧能够稳定运行。
MV一200图像采集卡性能特点:该卡的分辨率是768 x 576,采用新型的视频过滤技术,进而保障了采集图像的质量,其显示效果也是十分流畅。它支持的系统有Win98 / 2K / XP等多种系统,被广泛应用于人工智能领域、监控领域、事物定位识别领域。
工控机:工控机一般选择奔4系列。
软件的组成
对于图像信息完成详细的分配,例如图像处理软件,图像获取软件,定位软件,算法软件等等都是其中重要组成。
视觉系统的原理及流程图
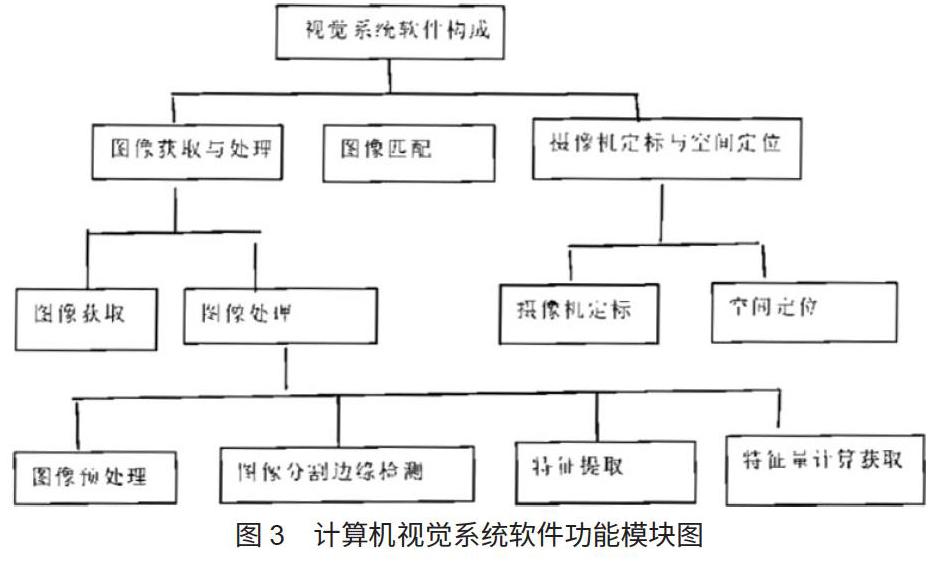
工业机器人的核心系统构成有三个部分,第一部分为工业机器人本体;第二部分是机器人外部的硬件设备,这些硬件设备包括外部设备、控制器、執行器等核心元件;第三部分就是计算机视觉系统,该系统完成的任务有图像的采集、图像的处理和计算、图像的分析和定位。通过Opencv的视觉库进行VC++.NET实行,流程如下图表4所示:
本文的计算机视觉系统在进行工作时,第一步要借由摄像机进行定标,建立坐标系统,定位摄像机的位置和摄像机对应点的位置。在定位流程展开之时,首先要标记基准点,基准点一旦确定,摄像机在进行图像采集的时候,就能够精准地在摄像机的坐标上标注这些基准点的位置。此外,就能够处理并计算采集卡的图像,具体得出基准点图像在坐标系中的位置坐标,最好使用定标计算法,计算出摄像机的参数。
计算机视觉系统运完成图片,数据,视频等等灵活改变,将这些信息统一起来,存储的格式选择BN格式,计算机发挥C语言的功能,完成图像调节,进而对函数有效控制,
让这些图像信息在计算机上显露出来,紧接着去除图像内含有的噪声和其他干扰,对图像进行平滑处理,针对灰度阈值的图像,使用二值化对其进行处理。当完成这些工作以后,接着就要找到与图片相符的具体特质,通过高度一致化的匹配完成图像的采集,如果重叠度比较理想,那么就称之为有效图像,如果重叠效率不高,那么则需要发挥3D数据库的功能,完成后期模型的优化选择,完成详细的分析计算工作。
直至确定和图像互相匹配的数据模型为止。整个操作流程如下图5所示。
结语
概括来说,计算机视觉系统是为了提高工业机器人的工作效率,降低人工工作任务量,保障工业生产的精度和质量,从而设计研发的,进而完成对外界信息的识别、定位、跟踪、搬运、夹持等指令。
参考文献
孙凤连,李扬.工业机器人视觉系统中双目摄像头标定算法研究[J].计算机与数字工程(04):30–33+97.
陈伟华,马琼雄,陈月军,等.基于VisionPro的工业机器人视觉定位系统[J].组合机床与自动化加工技术,2012(2):81–83.
王一,刘常杰,杨学友,等.工业机器人视觉测量系统的在线校准技术[J].机器人(03):45–48+77.
蒋书贤.基于机器视觉的工业机器人分拣系统研究[D].西南交通大学,2015.
猜你喜欢
福建基础教育研究(2019年11期)2019-05-28
杂文选刊(2018年1期)2018-01-09
中学生数理化·高一版(2017年1期)2017-04-25
科技创新与应用(2016年34期)2016-12-23
汽车科技(2016年6期)2016-12-19
科技创新导报(2016年21期)2016-12-17
中小企业管理与科技·下旬刊(2016年10期)2016-11-18
科技视界(2016年18期)2016-11-03
企业导报(2016年13期)2016-07-19
雕塑(1996年3期)1996-07-12
