
基于MEMS传感器组合的行人室内高度定位算法
2019-10-22 09:27路永乐郭俊启
压电与声光 2019年5期
刘 宇,李 瑶,路永乐,邸 克,郭俊启,方 针
( 1. 重庆邮电大学 先进传感器件与系统集成研究室,重庆 400065;2. 中国电子科技集团公司第二十六研究所,重庆 400060)
0 引言
GPS信号在室内被严重遮挡,无法利用。目前应用较广的室内测高技术主要分为两类:
1) 基于无线局域网、蓝牙、射频识别、超宽带等基础设施的测高技术[1-4]。这类技术需要在室内预先部署设备,自主性差。
2) 基于气压计的测高技术。气压计测高具有自主性好,精度高,实时性强等特点,但易受环境温度的影响,可靠性较低[5-6]。
惯性导航技术依靠惯性传感器进行姿态解算,具有良好的自主性[7]。由于气压计的优点及局限性,一些学者提出了基于惯性传感器与气压计融合的室内高度算法。Zhu J X提出了一种融合气压计数据和加速度计积分得到的高度方差进行上、下楼判定[8]。但微机电系统(MEMS)加速度计精度较低,误差较大,基于加速度计积分得到的高度会随时间发散。Zheng L提出了一种基于足部佩戴方式、气压计和加速度计融合的高度算法,该算法通过卡尔曼滤波融合气压计高度数据和加速度计积分的高度数据进行高度解算,同时利用零速修正算法降低加速度计的高度漂移误差[9]。零速修正算法虽然可以降低加速度计积分的高度漂移误差,但仅适用于足部,对腰部设备适用性差。
本文提出了一种基于腰部佩戴方式、加速度计和气压计融合的室内高度定位算法。该算法分别利用加速度计的峰值特征和四分位距值特征进行上楼判定和下楼判定;然后利用气压计计算行人步高进行高度计算。为了降低环境温度对气压计的影响,本文将滤除气压突跳的高度数据,减少高度误差。经实验验证,本文的高度定位算法受环境温度影响较小,且本文算法高度与实际楼层高度的误差小于2 m,能够将人员定位到正确楼层。
1 惯性单元介绍
本文使用的微惯性测量单元集成了三轴MEMS加速度计、三轴MEMS陀螺仪及气压计。该惯性单元置于人员的腰部位置,本系统采用的导航坐标系为东、北、天坐标系,简称为n系。载体坐标系为b系,x、y、z方向为前、左、上方向。
1.1 步态检测
根据行人步行的运动特性,行走时加速度计三轴模值输出波形成周期性变化,因此可利用该周期性来检测行人步态。三轴加速度模值为
(1)
式中ax、ay、az分别为加速度计三轴输出的数据。
对anorm进行峰值检测,一个峰值点(波峰或波谷)记为1步。
1.2 气压计解算高度
实际的大气温度随高度的增加而递减。以平均海平面为起算高度,行人高度和气压的关系为
(2)
式中:H为行人的高度;P为观测点的气压值;P0=101 325 Pa为标准气压。
根据式(2)可计算得到行人的绝对高度,但在室内,绝对高度无法提供行人的高度位置。因此需要计算2个位置的相对高度,得到行人在室内的高度为
ΔH=H2-H1
(3)
式中:H1为气压计测量的行人初始位置高度;H2为气压计测量的行人当前时刻位置的高度。本文将行人初始位置高度置为0。
2 融合高度定位算法
为了降低外界环境对气压计的影响,本文利用加速度计对人员的上、下楼状态进行识别,利用滤出了气压突跳值的气压计数据进行高度解算,本文算法框图如图1所示。图中,h0,h1,h2为本文算法涉及高度的相关参量。
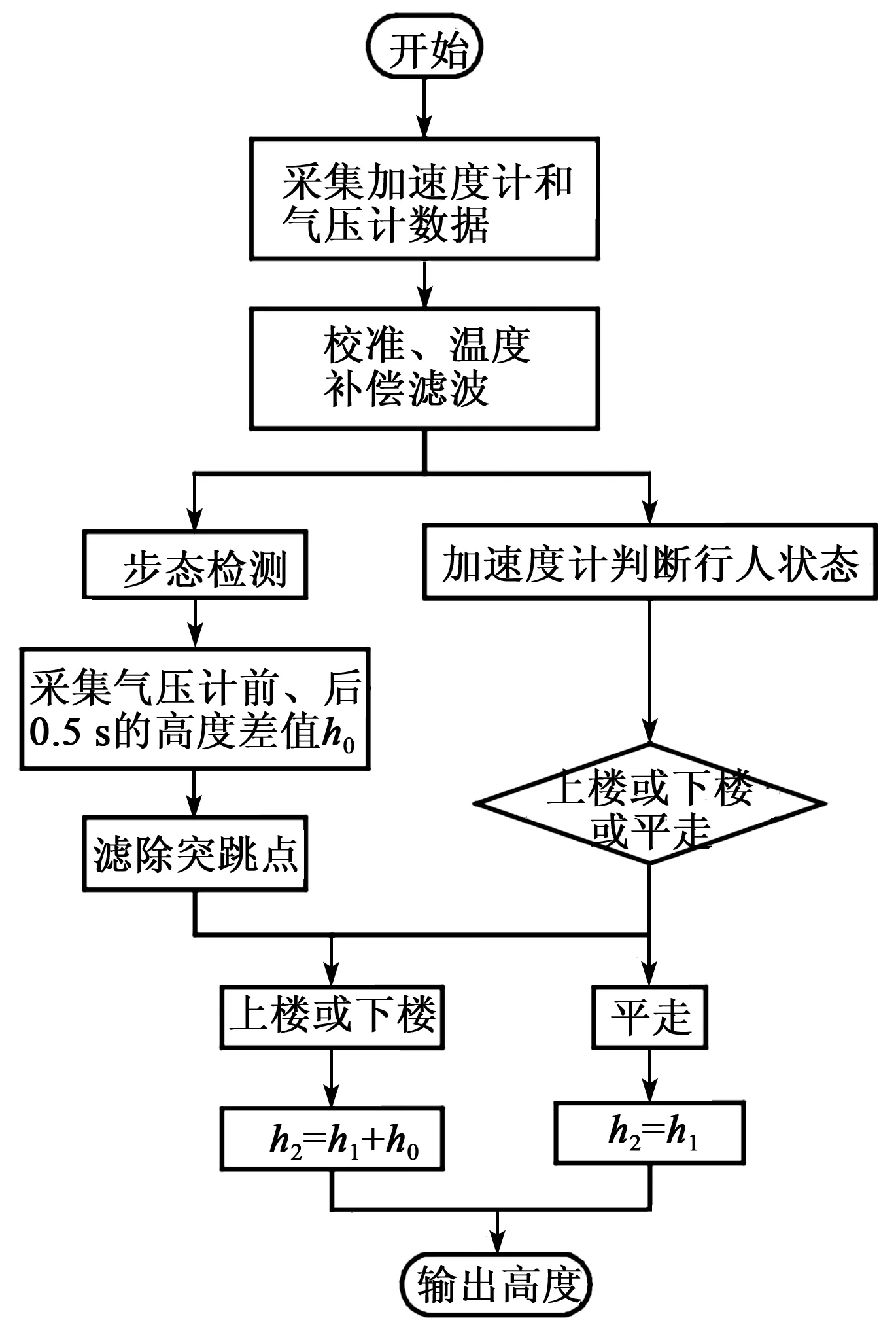
图1 高度算法框图
2.1 加速度计判定上下楼
四分位距也称为四分差,可用来反映一段数据的离散程度。行人在行走过程中,下楼的频率较平走和上楼的频率更大,因此,可用四分位距值作为识别上、下楼的参考量。四分位距值为
QIQR=Q3-Q1
(4)
式中:Q1为前50个数据的中位值;Q3为后50个数据的中位值。数列长度选取100,将数列的数据按从大到小排列。
本文采集了行人上、下楼及平走的加速度数据,通过分析加速计的峰值特征及四分位距值特征发现,可利用x轴加速度计的峰值进行上楼识别,利用z轴加速度计的四分位距值特征进行下楼识别,如图2所示。
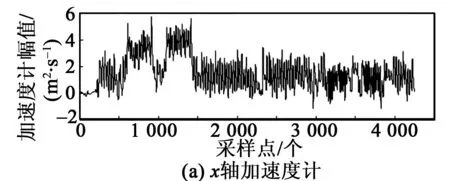
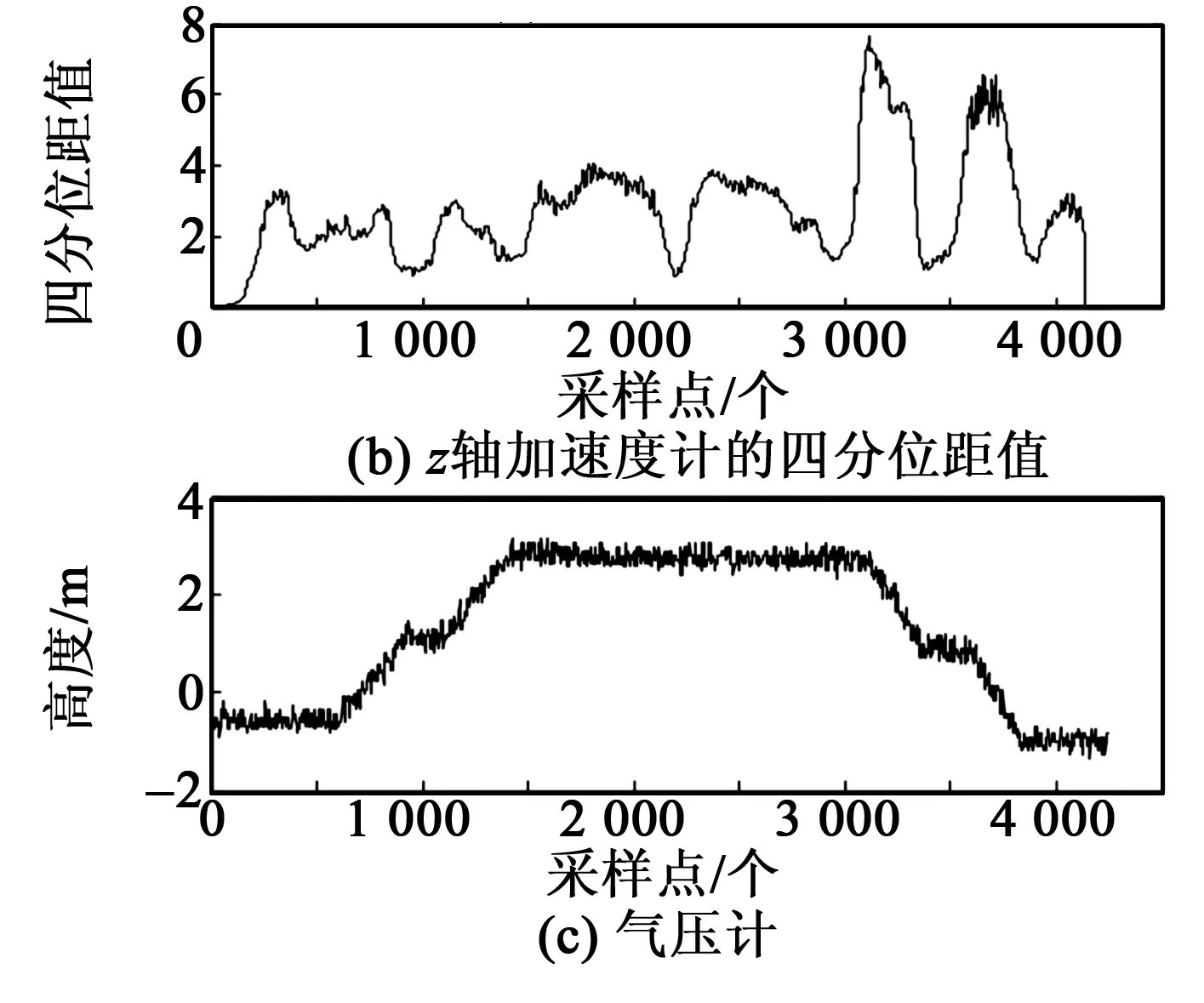
图2 加速度计的数据特征
利用加速度计的峰值特征和四分位距特征对行人的上、下楼及平走姿态进行识别,上、下楼姿态识别条件为
(5)
式中:Axmax为x轴加速度计的波峰值;avxmax为平走时x轴加速度计的波峰值均值;AzIQR为z轴加速度计数据的四分位距值;avzIQR为平走时z轴加速度计数据的四分位距值均值;α为上楼判定设置的阈值,β为下楼判定设置的阈值。
2.2 改进的气压计测高度
当行人在上、下楼受到环境温度的影响时,气压计会产生高度漂移误差。为了提高气压计测高的精度,本文以前、后0.5 s的气压高度差值h0作为参考量。当气压计受到环境温度影响时,h0会发生变化,本文将滤除这些气压差值h0,不参与高度解算。
本文采集了大量行人在正常环境中上、下楼的气压高度差值h0,如图3所示。同时也采集了行人平走进入环境温度升高(进入制热的空调房)和环境温度降低(进入有冷风的地方)区域的气压高度差值h0,如图4所示。
图3 行人上、下楼时的气压差值
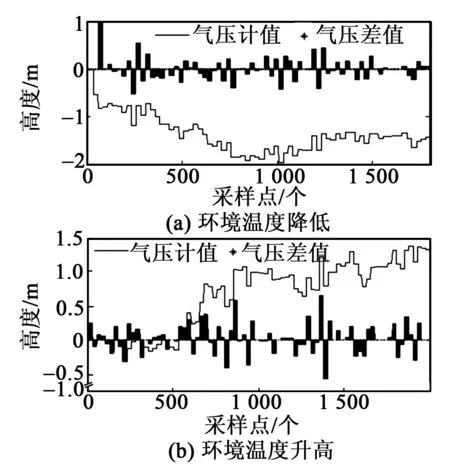
图4 平走时环境温度改变的气压差值
由图3、4可看出,行人在正常环境上、下楼时,h0一般为0.1~0.3 m。行人行走过程中气压计受温度影响时,前、后0.5 s内,h0绝对值一般为0.35~0.50 m,甚至高达1 m。
为了降低环境温度对气压计的影响,提高气压计测高的精度,本文将滤除“气压突跳点”,滤除条件为
|h0|>λ
(6)
式中λ为滤除气压突跳点的条件阈值。式(6)成立,则认为该气压差值为突跳点。当检测到气压突跳点时,则h0不参与高度计算。
本文的高度计算式为
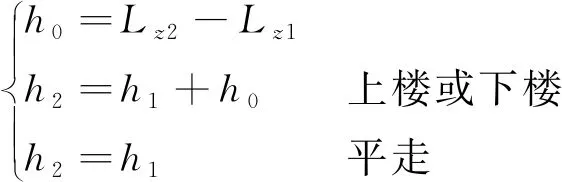
(7)
式中:Lz2为当前时刻气压计输出高度;Lz1为前0.5 s气压计输出高度;h2为当前时刻本文算法解算的行人高度;h1为前一步解算的行人高度。设行人的初始位置高度为0。
为了减少上、下楼误判造成的高度误差和气压计的高度误差累积,本文提出了一种改进的高度修正算法:行人平走时都在建筑的半层楼高处或整层楼高处,因此,当检测到行人平走时,可以将行人高度修正到半层高的整数倍,即
h2=hc×n(平走)
(8)
式中:hc为建筑的半层楼高;n=-2,-1,0,1,2,…等整数。
3 实验验证
本文将从两个方面对本文算法进行验证:
1) 验证本文算法不易受环境温度影响。
2) 验证本文算法的精度。
第一次实验设计为:实验地点为重庆邮电大学第一教学楼,层高4 m。行走路径为:行人从1楼走到4楼,其中3楼上4楼时,改变环境温度(用热水袋放在惯性单元旁边,使环境温度升高,如图A点),然后再从4楼走到1楼室外(有冷风,如图B点所示)。高度解算结果如图5所示。
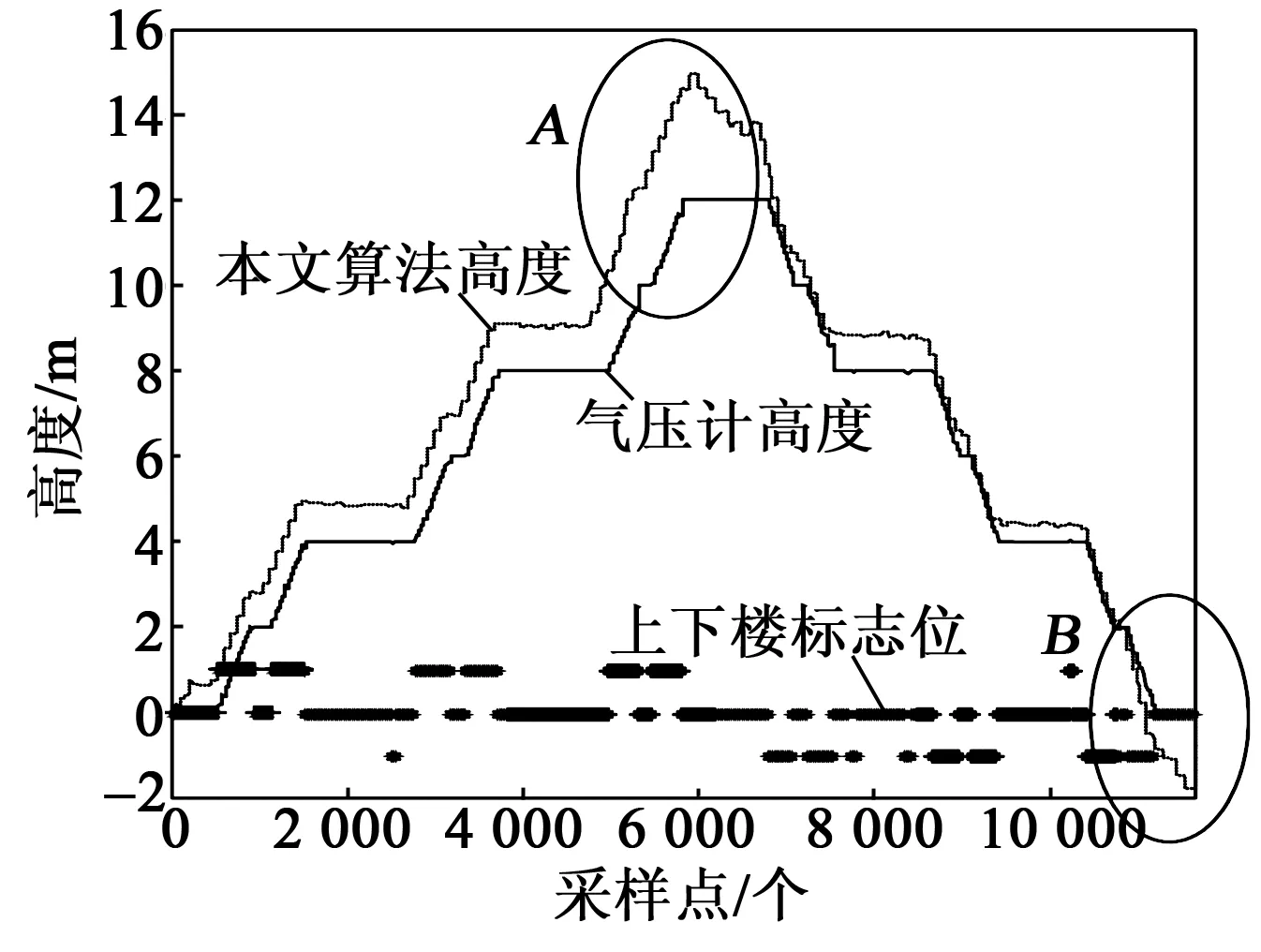
图5 改变环境温度的高度对比
由图5可看出,当改变环境温度时,基于加速度计的上、下楼识别算法未受影响。行人从3楼上4楼时,由于环境温度的升高,气压计高度增加了约3 m(见图5中A点);当行人从1楼走到室外时,由于环境温度的降低,气压原始高度降低了约1.8 m(见图5中B点)。由于本文高度解算算法滤除了气压突跳点,所以,本文算法解算高度并未产生很大的高度误差。
第二次实验为验证本文算法上、下楼识别的准确率,本文选择了4名不同身高、性别的实验人员,实验地点为重庆邮电大学信科大楼。本次实验设计为:每个实验人员都从1楼上到4楼,然后平走,最后从4楼下到1楼,行走路径如图6所示。经统计,每层楼上楼阶梯数和下楼阶梯数均为25阶,平走过程中,记录员记录实验员的平走步数,实验结果如表1所示。
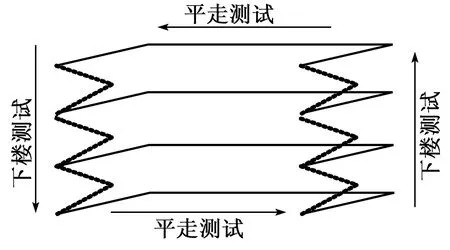
图6 行走路径

表1 上、下楼测试结果
由表1可看出,本文算法的上、下楼姿态识别准确率很高,上楼准确率均大于94.6%,下楼准确率均大于97.3%,平走识别率大于98.2%。
第三次实验为高度精度验证实验。本文选择了4名不同身高、性别的实验人员。本次实验设计为:选择了2个层高分别为4 m、5 m的建筑,实验人员在从1楼出发,首先经过随机的上、下楼行动后,到达7楼;然后再经过随机的上、下楼行动,到达3楼,实验结果如表2所示。
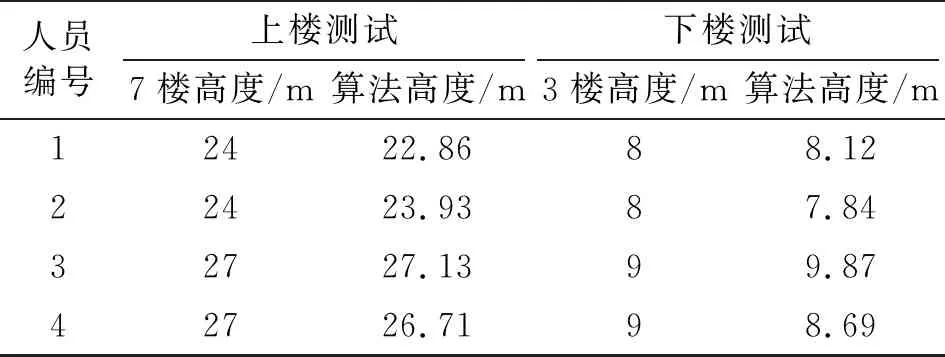
表2 高度测试结果
由表2可看出,不同人员在不同建筑的上、下楼测试中,本文算法解算的高度与楼层实际高度的误差均小于2 m,而建筑层高一般为4~5 m,所以,本文算法可将人员准确定位到楼层。
4 结束语
针对气压计易受环境因素影响的问题,本文提出了一种基于腰部穿戴、加速度计和气压计融合的人员室内高度定位算法。经实验验证,该算法不易受环境温度的影响,算法解算高度与实际楼层高度的误差小于2 m。因此,本文提出的人员室内高度定位算法可有效应用到各种环境变化较复杂的领域,具有很高的工程应用价值。
猜你喜欢
幼儿画刊(2021年5期)2021-12-02
Bone Research(2021年2期)2021-09-11
装备制造技术(2020年12期)2020-05-22
模具制造(2019年4期)2019-06-24
中国惯性技术学报(2019年1期)2019-05-21
中国惯性技术学报(2017年1期)2017-06-09
汽车维护与修理(2016年10期)2016-07-10
探测与控制学报(2015年4期)2015-12-15
浙江大学学报(工学版)(2015年7期)2015-03-01
导航定位与授时(2014年2期)2014-04-27
