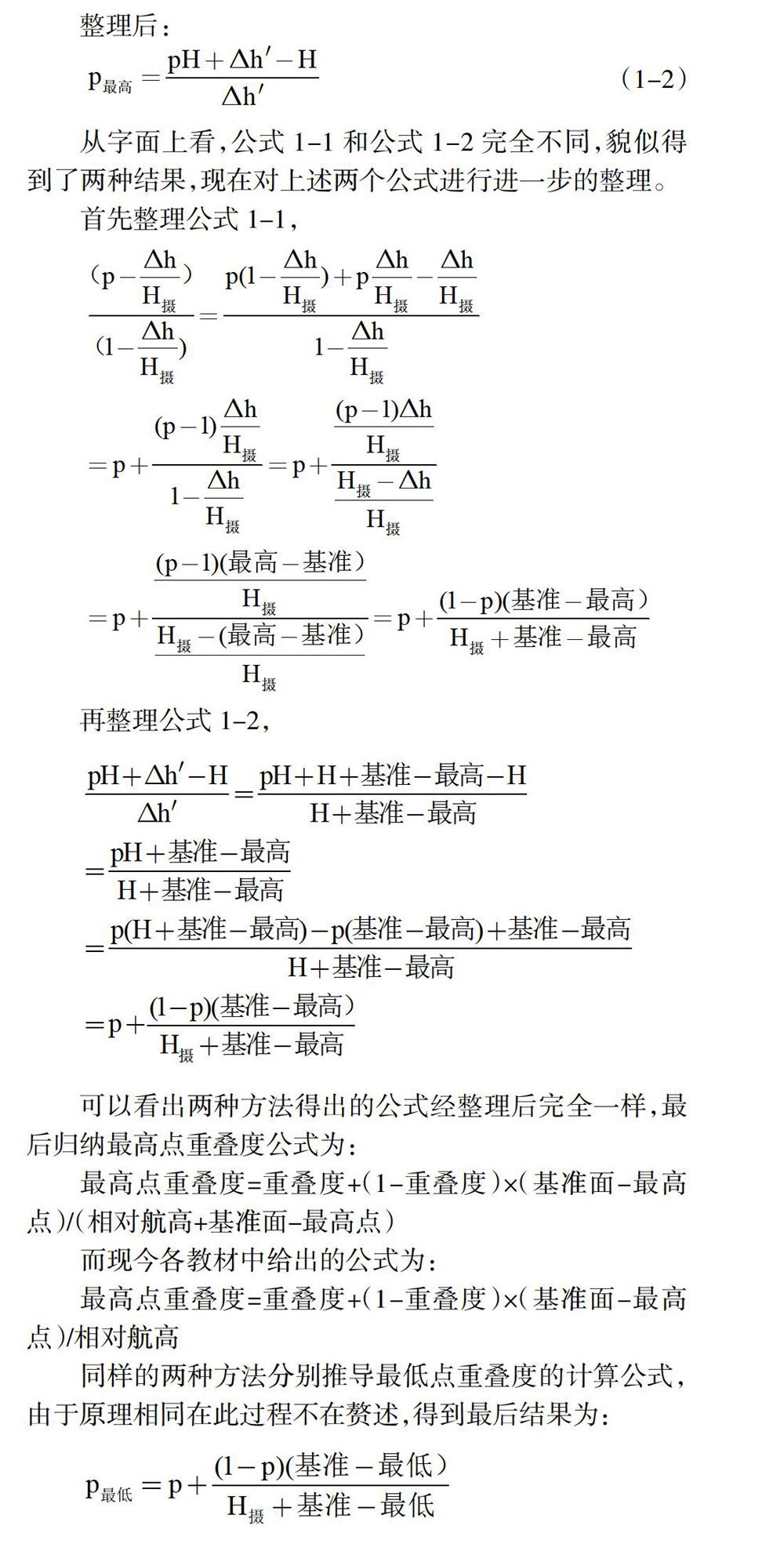
最高、最低点重叠度计算的分析研究
2019-10-24 08:53田昕
科技创新与应用 2019年24期
田昕


摘 要:文章分析摄影中心与基准面高程、最高点高程、最低点高程以及相对航高之间的几何关系,在已知基准面所设重叠度的前提下,分别推导了最高点和最低点相应重叠度的计算公式,并通过绘制几何结构图及实际飞行影像数据对分析结果进行验证。实验证明该公式推导正确,提高了两者的计算精度,保障了航测参数设置的准确性。
关键词:重叠度;最高点;最低点;基准面
中图分类号:P231 文献标志码:A 文章编号:2095-2945(2019)24-0066-04
Abstract: This paper analyzes the geometric relationship between the photography center and the datum elevation, the highest point elevation, the lowest point elevation and the relative navigation height. In this paper, the calculation formulas of the corresponding overlap degree of the highest point and the lowest point are deduced respectively, and the analysis results are verified by drawing the geometric structure diagram and the actual flight image data. The experimental results show that the derivation of the formula is correct, which improves the calculation accuracy of the two methods and ensures the accuracy of the setting of aerial survey parameters.
Keywords: overlap; highest point; lowest point; datum
1 概述
摄影测量的目的是通过影像进行定位,而影像定位的前提是将各像对恢复立体效果,只有像片之间具有一定的重叠度才能达到上述要求,因此,重叠度在摄影测量中起到至关重要的作用。在实际作业中,经常会遇到类似山地、高山地等高差较大的地形测区,在规划航线、设置航摄参数时,往往会考虑最低处的分辨率和最高处的重叠度。由于分辨率的计算是像元大小、焦距和相对航高之间简单的比例关系,其计算结果也较为直观,因此在该数值的计算上并没有太大争议。而重叠度的计算过程相对比较繁琐,得出的结果也很难直观判断对错,尤其在最高点和最低点重叠度的计算上需要更加谨慎,最高点重叠度若不够则会干扰影像匹配,导致空三计算失败;最低重叠度过大会引起摄影基线过短,造成高程精度不能满足要求。决定两者大小的正是基准面上设置的重叠度数值,而基准面重叠度和最高、最低点重叠度之间的函数关系直接影响前两者的计算。本文分析了摄影中心、基准面高程、最高、最低点高程以及相对航高之间的几何关系,对最高、最低点重叠度的计算过程进行了推导,得出两者的计算公式,并利用实际生产中的影像数据进行验证。实验证明,笔者自行推导的公式所计算的结果与实际飞行像片的重叠度更加切合,准确度更高,对航线规划以及后期影像处理奠定了良好的基础。
2 最高、最低点重叠度的推导
直观的认为,在某个基准面设定好重叠度后,高于基准面的地物重叠度必然比预设值小,同理低于基准面的地物重叠度比预设值大,而该值不能过大或过小,否则影响计算过程和成果精度。当测区包含高差较大的地形时最高和最低点的重叠度变化幅度会很大,而基准面上的重叠度又与两者存在一定的数学关系,因此基准面重叠度数值的选取较为关键,而首当其冲是需要推出基准面重叠度与最高、最低点重叠度之间的函数关系。本节对三者之间的函数关系进行分析和推导。
首先研究最高点与基准面之间的重叠度关系。如图1所示:O1、O2为相邻像片的摄影中心,GF所在平面为测区的最高平面,AB所在平面为选取的基准面,GF、AB分别为像片在两个平面上的覆盖范围。众所周知,重叠度为像片重叠度分的长度与像片边长之比。其中CB为O1、O2两像片之间的重叠长度,CB/AB即为基准面上预设的重叠度。同理,EF为O1、O2两像片在最高面上的重叠长度,EF/GF则为最高面上的重疊度。本节用两种方法对EF/GF与CB/AB之间的关系进行推导。
令O2Q=H摄,即相对航高,最高面-最低面=Δh,AB=CH=L基准面重叠度为p。作ED平行于FB,则EF与DB相等。其中CB=p*AB=p*L,△CDE相似于△O2CH,可得出关系:
3 实验与分析
本次实验以部门所做荫营镇1:2000正射影像图航测项目为依托,通过飞行影像、实测地形概况及处理成果进行分析,比较两种公式的正确性。
3.1 测区概况
荫营镇是山西省阳泉市郊区区委、区政府驻地,2001年初由原荫营镇、白泉乡、三郊乡三个乡镇合并而成,荫营镇地处太行山西麓刘备山下,距山西省阳泉市北6公里处,全镇总面积111.62平方公里。本次飞行范围为北纬37°53′35″~37°57′43″,东经113°32′04″~113°39′27″,约100平方公里,测区包含刘备山,地形起伏较大,最高点约1100米,最低点约600米,测区如图2所示。
3.2 参数设置
本次飞行采用成都纵横科技公司生产的CW-007C固定翼无人机,使用CWCommander地面站规划航线。鉴于高差约500米,本次选择最高点和最低点高程的二分之一,即高程为850米的水平面为基准面,在此基准面上,设定航向重叠度为75%,旁向重叠度为65%,考虑无人机续航及安全问题,本次按照1000比例尺的高度采集,分辨率设置为0.08米,相对航高为620米。因此绝对航高为1470米,测区分为六个区域,共49条航线,航线分布如图3所示。
3.3 对比分析
首先由现今通用教材中给出的公式进行计算,将上述各参数代入求得结果如下:
最高点航向重叠度=航向重叠度+(1-航向重叠度)×(基准面-最高点)/相对航高=75%+(1-75%)×(850-1100)/620=64.9%
最高点旁向重叠度=旁向重叠度+(1-旁向重叠度)×(基准面-最高点)/相对航高=65%+(1-65%)×(850-1100)/620=50.9%
然后用本文推导的公式按照同样的参数进行计算,得出:
最高点航向重叠度=航向重叠度+(1-航向重叠度)×(基准面-最高点)/(相对航高+基准面-最高点)=75%+(1-75%)×(850-1100)/(620+850-1100)=58.1%
最高点旁向重叠度=旁向重叠度+(1-旁向重叠度)×(基准面-最高点)/(相对航高+基准面-最高点)=65%+(1-65%)×(850-1100)/(620+850-1100)=41.3%
可以看出,教材中给出的公式计算的结果相比本文推导的公式计算的结果,航向重叠度多了近7%,旁向重叠度多了近10%,差距较大,接下来将根据实验数据对两种结果进行验证。
以第一块区域的第一架次为例,该架次涵盖了测区中最高点,通过检测最高点对应的像对间的实际重叠度,并与前面算出的两种结果作比较,即可得出结论。由于重叠度的计算是在理论条件下,实际飞行中,由于无人机姿态幅度较大,对重叠度造成一定的影响,得出的数值与理想值必然有所差异,而同时在实践中作业人员尽量选择无风的天气下飞行,这也一定程度上提高了该数值的精度,因此实际检测的重叠度应该与正确结果更接近。
本次飞行风速约1m/s,影响较小,采用武汉讯图科技有限公司天工软件中的飞检模块FlyCheck对像片的实际重叠度进行检测,导入像片,加载带有姿态数据的POS文件,运行程序计算重叠度。选取其中涉及到最高点的几个像对进行验证,如图4。
这里选取了该区域覆盖最高点的六个像对,其中三个航向覆盖,另三个旁向覆盖,分别统计各自的航向、旁向重叠度,统计结果由表1所示。
根据表1统计的数据,最高点的航向重叠度平均值为56.82%,与通用公式计算的64.9%和推导公式计算的58.1%相比,更接近于后者,最高点旁向重叠度平均值为43.3%,与通用公式计算的50.9%和推导公式计算的41.3%相比,同样接近于后者,两者间较小的差值可以认为略微受到风力导致无人机姿态较大的影响。实践证明,由本文推導的最高、最低点重叠度计算公式更接近于现实。假设该区域规划航线将航向重叠度设为70%,按照教材通用公式计算得出最高点重叠度为57.9%,而推导公式计算得出49.7%,已经低于规范要求,影响后期内业处理精度,给工作带来一定的偏差。
实际上在推导公式中,其分母“相对航高+基准面-最高点”和“相对航高+基准面-最低点”,正是飞机相对于最高点和最低点的相对高差,即为相对计算面的航高,则公式可以进一步整理为:
最高点重叠度=重叠度+(1-重叠度)×(基准面-最高点)/相对(最高点)航高
最低点重叠度=重叠度+(1-重叠度)×(基准面-最低点)/相对(最低点)航高
4 结论
本文对现今教材中通用的最高、最低点重叠度计算公式进行了分析,并通过研究最高面、最低面、基准面、相对航高和摄影中心之间的几何关系,对两个重叠度计算公式重新进行推导,改进了现用公式中计算精准度的不足。同时根据航测项目中的影像数据,分别统计了最高点、像对的航向、旁向重叠度,并与两种公式计算的理论数值进行对比,结果表明,推导的计算公式更加符合实际数据。通过理论分析和实践验证,证明笔者所推导的公式是正确的,为航测工作的质量起到一定的保障作用。
参考文献:
[1]窦学颖,孟宪军.山区航带设计重叠度计算[J].铁道勘察,2006(02):22+80.
[2]黄慧萍,吴炳方.地物大小、对象尺度、影像分辨率的关系分析[J].遥感技术与应用,2006(03):243-248.
[3]秦光银.航空摄影中飞行质量的保证[J].武测科技,1992(03):18-21+17.
[4]李昊霖,李冲,黄瑞金,等.A3数码航摄仪飞行重叠度检查[J].遥感信息,2015,30(06):58-62.
[5]李秀丽.基于Google地图数据的可视化无人机航线规划研究[J].测绘通报,2014(01):74-76.
[6]何敬,李永树.无人机航线规划参数分析研究[J].资源与人居环境,2013(10):26-28.
猜你喜欢
中学课程辅导·教育科研(2020年18期)2020-07-04
书香两岸(2020年3期)2020-06-29
教育界·下旬(2019年8期)2019-11-27
新课程·中旬(2017年12期)2018-03-07
股市动态分析(2014年20期)2014-06-10
数理化学习·高一二版(2009年7期)2009-11-23
计算机世界(2009年31期)2009-08-20