
A Descriptor System Approach of Sensor Fault State Estimation for Sampled-data Systems
2019-11-05 00:59ZhenhuaZhouMaoWangandBoyuanYang
Zhenhua Zhou, Mao Wang and Boyuan Yang
(1. Changzhou Vocational Institute of Light Industry, Changzhou 213164, Jiangsu China;2.Department Space Control and Inertial Technology Research Center, Harbin Institute of Technology, Harbin 150001, China)
Abstract: This paper proposes a fault estimation method for sampled-data systems with sensor faults. The sampled-data system is firstly discretized to obtain a discrete-time model. Then a descriptor system is constructed to describe the discretized system with sensor faults. Based on the descriptor system representation, a bank of observers are designed to isolate and estimate the sensor faults. These observers can be synthesized by the linear matrix inequality (LMI) technique, and sufficient conditions for the existence of these observers are derived. Finally, the effectiveness is ascertained by an aircraft simulation example, which is in the proposed method.
Keywords: fault isolation and estimation; sampled-data system; descriptor system; linear matrix inequality (LMI)
1 Introduction
In recent decades, the fault estimation of sampled-data systems by the observer design method has received more and more attention[1-5]. However, for a well-known reason, if the sampling process is relatively slow, the stability and stabilization condition of the continuous-time observers may be lost which makes the fault estimation results unfeasible. In many practice, this unfeasibility cannot be solved. So, a new model by transforming the sampled-data systems into descriptor ones is proposed.
Descriptor systems, which can be also defined as the singular systems or differential-algebraic equation systems, are widely used to describe plenty of practical systems such as electrical networks[6], constrained mechanical systems[7], aircraft modeling[8]and so on. A lot of models have been established to guarantee the feasibility of the fault estimation in descriptor systems by the observer designing[9-11]. However, little existing work focuses on the fault estimation problem of sampled-data descriptor systems, and the observability of some descriptor systems in practical works may not be realized[12-14]. So there is a great incentive for us to develop a novel sampled-data descriptor observer for the estimation of system faults, and furthermore to improve the detectability of the designed system.
Recently, a novel design method of observation is proposed in Ref.[15] to investigate sensor fault reconstruction and sensor compensation for discrete-time systems. Based on the results in Ref.[15], a new approach of sensor fault estimation for sampled-data systems is considered. The sampled-data systems are firstly discretized to obtain a discrete-time model. Then a fault estimation model is established by designing a discrete-time observer of the discretized descriptor system, the necessary and sufficient condition for the existence and convergence of the proposed observer is given and proved. In the paper, many results have been proposed to design observers for discrete-time systems by using the linear matrix inequality (LMI) techniques, so the observer design is formulated as an LMI feasible problem, which can be easily solved by standard convex optimization algorithms[16].
Autonomous land vehicle control system is a class of norm bounded parameter uncertainty of generalized continuous piecewise affine systems[17].In view of the lack of an autonomous land vehicle system in previous switching control strategies and system delays, the case of unknown external interference and noise on the adverse effects of the performance of the control system, a method with a linear matrix inequality LMI algorithm in the papercan be put forward[18-20].Then discussion is needed for the detectability of descriptor system since a pair of parametersTandNare introduced[21-23].
This paper is organized as follows. In Section 2, a model of the sampled-data system is proposed to be studied, and then we discretize the system into a descriptor one by an efficient way. In Section 3, sensor fault estimation observer is presented for the evaluated discrete-time linear descriptor systems which is presented and formulated as an LMI formulation. The detectability of the designed observer is discussed. In Section 4, two simulation examples are given to demonstrate the validity of our results. Finally, several conclusions are drawn in Section 5.
2 Problem Statement
Consider the following sampled-data system:
(1)
wherex(t)∈nis the state,u(t)∈pis the control input,y(kTs)∈mis the sampled output at time instantkTs, andf(kTs)∈mdenotes the sensor fault. In system(1),Tsdenotes the sampling interval,Ac,Bc,DcandFare known constant matrices of appropriate dimensions.
Additional remark: At first, the following system representation is considered:
In this situation, the following descriptor system will be obtained:

where:

To obtainTE+NC=In+m, we must choose:

Denotingx(k)=x(kTs),u(k)=u(kTs), andy(k)=y(kTs), the discretized representation of System(1) can be derived as:
(2)
where:



So, we have to combine the descriptor system approach to the dedicated observer scheme, as used in Professor Wu’s paper (IEEE Transactions on Fuzzy Systems) 2015[16].
The following Lemma[17]is needed.
Lemma1Given a scalarγ>0, the discrete-time system described by:

(3)
Which is stable and its transfer functionHyu(z)=C(zI-A)-1B,satisfies ‖Hyu(z)‖<γ,if and only if there exists a matrixP>0 such that:
(4)
3 Sensor Fault Estimation Observer Design
In this section, a descriptor system is firstly constructed for System(6). Then, an observer is designed to simultaneously estimate the statex(k) and the sensor faultf(k).
Defining:

(5)
Then the System (2) is rewritten as the following descriptor system:

(6)
where:
(7)
For the descriptor System(6), the following observer is constructed:


(8)
Suppose that matricesTandNare chosen such that:
TE+NC=In+m
(9)
where the matrixT∈(n+m)×(n+m),N∈(n+m)×mmay be singular and rank(T)=rank(N)=r≤n.Then the following theorem is presented to design observer (8).
Based on Lemma 1, the following Theorem is proposed to synthesize a robust sensor fault estimation observer.
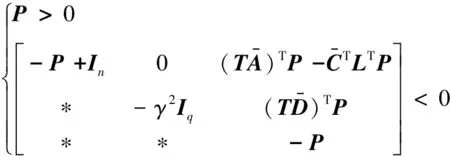
Theorem1Given a scalarγ>0, the dynamic System (8) is a robust sensor fault estimation observer with ‖Hed(z)‖<γ. if and only if there exist matrices:P∈(n+m)×(n+m)andW∈(n+m)×msuch that:
(10)
and the gain matrixLin observer (8) is determined byL=P-1W.
Proof Using Eq. (9), the descriptor System (6) is written as:

(11)
The augmented state estimation error is defined as:

(12)
Subtracting Eq. (8) from Eq.(11), the error dynamic equation is obtained as:

(13)
Applying Lemma 1 to Eq.(13), we obtain that ‖Hed(z)‖<γif and only if:

(14)
By the well-known Schur complement Lemma in Ref. [22], Inequality (14) is equivalent to:
(15)
LettingW=PL, Eq.(15) comes to Eq.(10). Then the gain matrixLis determined byL=P-1W.

For the convenience of discussion, the definition of detectability for the descriptor systems is introduced in Ref.[1].
Definition1The descriptor System (6) is calledR-detectable, if the following condition holds:

(16)

ProofIt is obvious that:
(17)
Using Eq. (9), we obtain:
(18)
SinceTis of full rank, we have:
(19)
Applying Sylvester’s equality to Eq. (18) gives:

(20)
Considering Eq. (17) and Eq.(20), it becomes:
(21)
If the descriptor system (6) isR-detectable, we have:

(22)
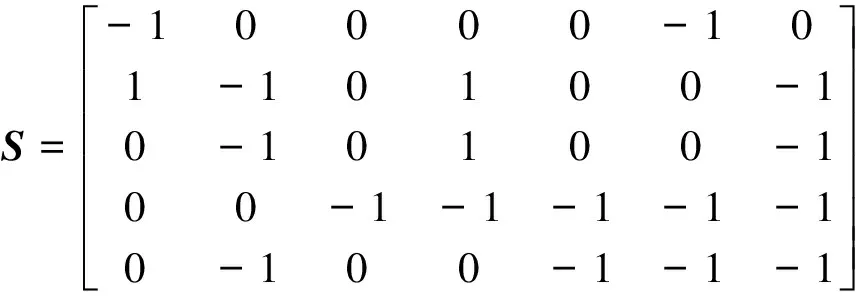
(23)
whereS∈n×(n+m)is an arbitrary matrix, which provides us a degree of freedom to determine a nonsingular matrixT.
4 Simulations
In this section, a simulation example is given to show the effectiveness of the proposed method.
Firstly, a fault estimation observer for Sensor 1 is designed.
Case1Consider the following sampled-data system in the form of System(1) with the following parameters:


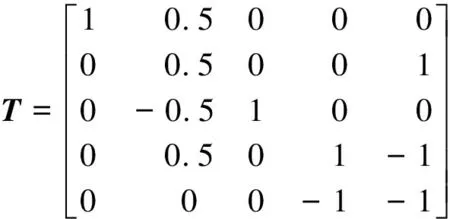
with the sampling intervalTs=0.1 s, Choosing:
We obtain:

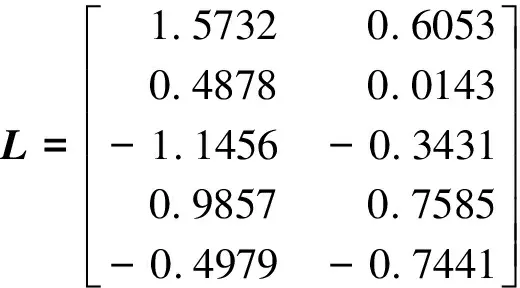
It is obvious thatTis of full rank. Then, by lettingγ=0.4 and applying Theorem 1, it comes:

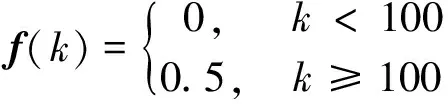
The disturbanced(t) is chosen as random noise withd(t)~N(0,1). The following sensor fault (of Sensor 1) is considered:

The fault estimation result is shown in Fig.1.
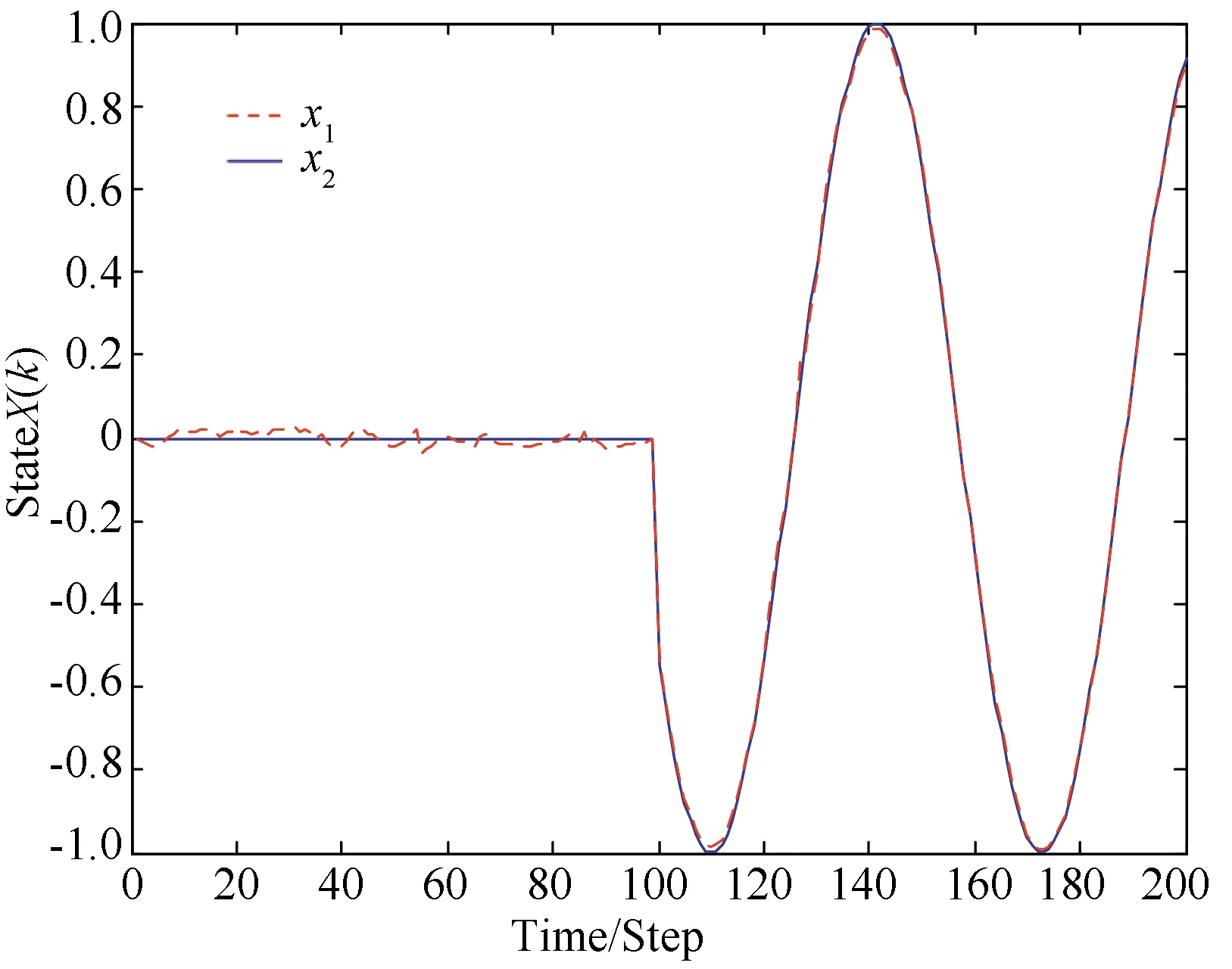
Fig.1 The fault estimation result in Case 1
Then, a fault estimation observer for Sensor 2 is designed.
Case2Consider the following sampled-data system in the form of System (1) with the following parameters.

Choosing:

We obtain:
Letγ=0.4 and apply Theorem 1, it comes:
The disturbanced(t) is chosen as random noise withd(t)~N(0,1). The following sensor fault (of Sensor 2) is considered.
The fault estimation result is shown in Fig.2.

Fig. 2 The fault estimation result in Case 2
Case3Finally, we consider a practical example of the tunnel diode circuit, in order to confirm the analysis and synthesis measures established in the priorsections[23]. In the tunnel diode circuit system,x1(k),x2(k),x3(k) can be described by the following Table 1.

Table 1 The significance of state variable xi(k)
The practical example can be abstracted as a system which is given by the prior dynamics system(1).y(k)=Cix(k),i=1,2.The data we used is given in Ref.[23]. Now, we also need some more data:

The other parameters are obtained by Case 2. Letγ=0.9 and apply Theorem 1, it comes:

The disturbanced(t) is chosen as random noise withd(t)~N(0,1). The following sensor fault (of Sensor 2) is considered.

5 Conclusions
The fault estimation method for sampled-data systems with sensor faults is addressed in this paper, based on designing observers for discrete-time descriptor systems, and a novel approach of sensor fault estimation for sampled-data systems is presented. The paper has established the necessary and sufficient conditions for the convergence of the proposed observer for the discretized discrete-time descriptor systems, and expressed it in a linear matrix inequalities formulation [LMI], and the detectability of the designed system is proved as well. Then two simulation examples are used to demonstrate the effectiveness of the design procedure which can be implemented.
 Journal of Harbin Institute of Technology(New Series)2019年5期
Journal of Harbin Institute of Technology(New Series)2019年5期
- Journal of Harbin Institute of Technology(New Series)的其它文章
- State Estimation for Non-linear Sampled-Data Descriptor Systems: A Robust Extended Kalman Filtering Approach
- Complementary Sliding Mode Speed Control with Saturation Function Boundary Layer Optimization
- An Improved Dynamic Friction Rejection Attitude Stability Control Strategy
- Relationship on the Head Deviation Rate and Laying Length of Porous Tubes
- Review: Recent Advancement of Experimental and Numerical Investigations for Breaking Waves