电动伺服舵机的控制与仿真
2019-11-05 10:20郭永凤
计算技术与自动化 2019年3期
关键词:PID控制
郭永凤

摘 要:阐述了无刷直流电机的工作原理,分析了电动伺服舵机的系统结构并建立了电动伺服舵机系统的数学模型。推导了舵机系统的传递函数并进行稳定性的分析,提出了基于PID控制方法的电动伺服舵机的控制策略。对所提出的舵机控制系统进行了稳定性分析,利用MATLAB/Simulink对舵机系统的负载、电压、转角、输出力矩等进行仿真。
关键词:伺服舵机;无刷直流电机;PID控制
中图分类号:TH13 文献标识码:A
Abstract:The working principle of brushless DC motor is introduced,the system structure of electric servo actuators is analyzed,its mathematical model is established. The transfer function of the servo actuator system is deduced,its stability is analyzed,the control strategy for the electric servo actuator system based on PID control is advanced. The stability of the presented controller is proved,a simulation test is finished about the load,the voltage,the rotation angle and output moment of the electric servo actuator system.
Key words:servo actuator;brushless DC motor;PID control
舵机按照动力方式可分为如下几类,由液压驱动的成为液压舵机;由气压驱动的舵机称为气动舵机;由电压气驱动的舵机称为电动舵机。其中的电动舵机有很多的其它舵机没有的优点,包括所占空间小,质量小,反馈速度快等等给[1]。电动舵机系统如果要达到对控制目标进行高精度的控制是较为复杂的,需要用到机电一体化的控制理论,其能否达到所需要求,将会影响到飞行器的飞行姿态甚至飞行安全。一个完整的舵机伺服系统回路包括液压、电压、电动等,随着技术的发展和整体飞行器的需求的增加,电动舵机系统要达到的目标越来越高,及其稳定性能的要求也随之增加[2]。因此,对电动伺服舵机的控制的研究意义重大。
电动舵机一词早在二战时期就被美国提出,并且利用电动舵机制造出了C-1自动驾驶仪,当时,这种仪器主要应用在导弹中,例如美国的RIM-66导弹以及法国的R530导弹都应用了这种仪器[3]。20世纪70年代之后,发现了新型的稀土资源,这给电动舵机的发展带来了第一道曙光。靠着这种稀土资源,电动舵机的可靠性大大提升,这种改良后的电动舵机仍旧运用于导弹。当时无刷电机还未出现,有刷电机为首选,其在高速运转时会产生电火花,造成电磁波干扰,影响跟随轨道的精度,也需要定期更换电刷,减少舵机的寿命。80年代以来数字信号处理器的出现以及现代控制理论的快速发展等等条件下,为电动舵机的发展带来了第二道曙光。这时的电动舵机可靠性和精度大大提高,发生了质的飞跃。可以说是革命性的改变。90年代之后,稀土资源被广泛应用,集成芯片高速发展,现代控制理论越发成熟,电子技术逐渐展现出它的肌肉等等,为舵机的发展带来了第三道曙光[4]。无人机以及无刷直流电机这时也开始出现,无人机作为军事领域的重要武器,各国也开始重视舵机的发展。因此也出现了无刷舵机,这种舵机具有所占空间小,质量小,反馈速度快,寿命长,精确度高等优点[5]。从这时起,舵机逐渐被广泛应用到飞行器上,到了现代,智能芯片的出现,促进了机器人的发展。而电动舵机也被广泛应用于机器人中,例如dynamixel,而我国的机器人不久之前控制其动作还使用普通的传统结构。
我国某个航天研究所生产的有刷直流舵机虽具有一定的优势,但是其只能运用于小型无人机上,可靠性,稳定性还存在一定的差距。而我国在输出大扭矩的无刷直流舵机,基本处于空白状态,而这种舵机别国严格封锁技术输出,国内的技术突破迫在眉睫。
1 电动伺服舵机
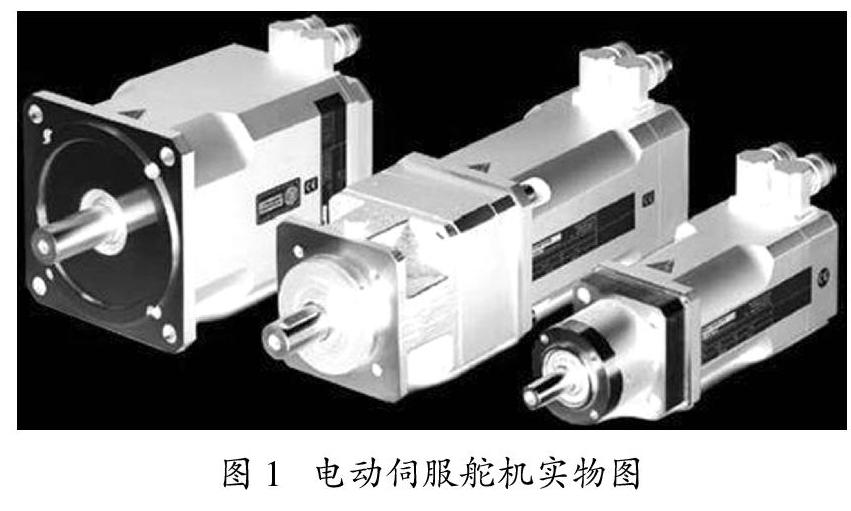
电动伺服舵机以伺服电机为核心,还包括一个运算放大器、一个传感器,一共三部分,如图1所示。
1.1 无刷直流电机的工作原理
无刷直流电机工作的核心电子的转向,无刷直流电子中具有定子磁场和转子磁场两个磁场,其中定子磁场是通过多极绕组定子产生的,而转子磁场是通过永磁体转子产生的。无刷直流电机通过两个磁场产生的磁力线分布不均,产生力矩再转化成电势能。两磁场磁力线方向是否一致是电机是否在工作的关键,所以要想电机工作两磁场的磁力线方向要相反。无数直流电机就是通过改变磁场方向从而产生力矩而工作的,如图二所示。
无刷直流电机的内部具有一个半导体开关,通过设置开关的状态可以使定子磁场旋转。一旦定子磁场以某一速度旋转起来,转子磁场也会被反作用的以相同的速度旋转起来,这样就可以完美的替代原来电机中的变相器和电刷的功能。所以也可以说这种电机是永磁同步电机。
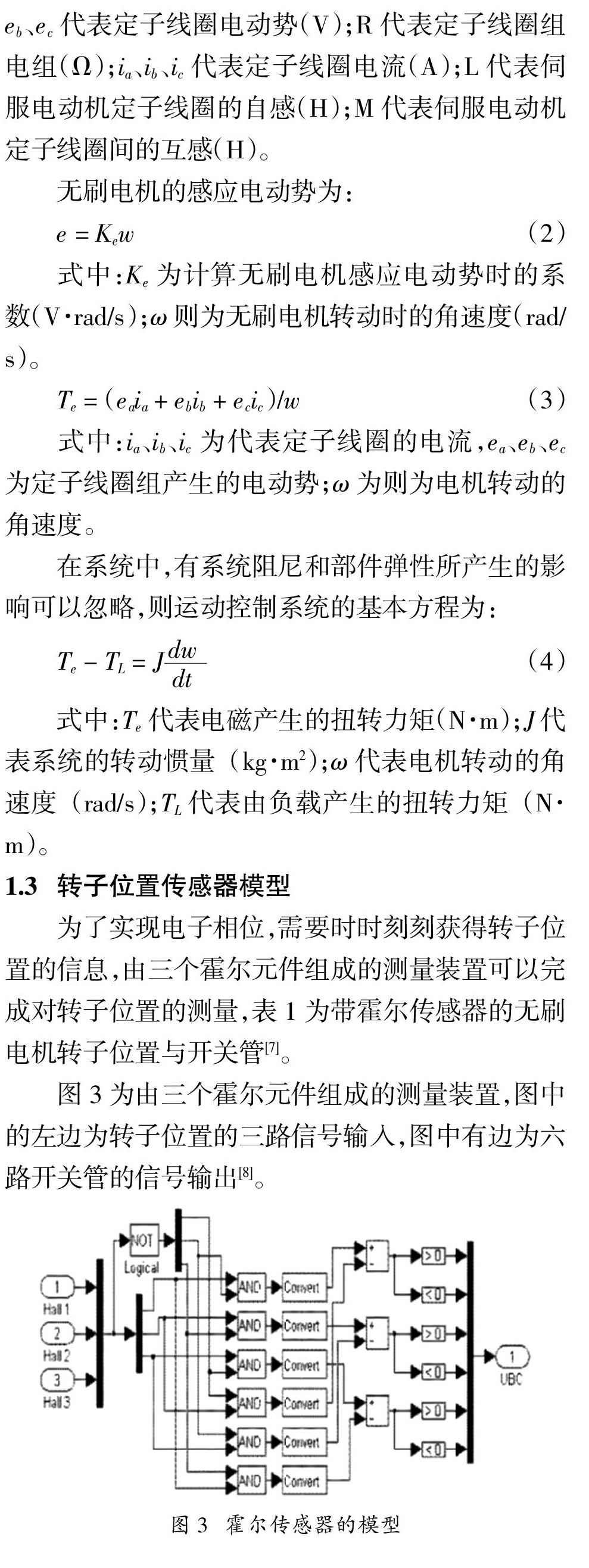
无刷直流电动机中除了直流开关,另一个重要部件是位置传感器,这里通常使用霍尔元件作为传感器。上面说无刷直流电动机要靠定子磁场转动带动转子磁场,为了达到这一目的,就需要位置传感器来工作了,位置傳感器穿插在两磁场中的作用在于交换两者的电流,霍尔元件可以根据转子的旋转,测量它与定子绕组的相对位移量,再根据预定好的输入信号和反馈信号控制半导体开关,通过这一控制律可以实现换流,也就是电机的永磁。位置传感器还可以在工作中给予定子绕组所产生的磁场旋转所需的电动势能[6]。
1.4 电动伺服舵机总体模型的建立
基于以上两部分模型的建立和PID控制理论,电动伺服舵机的控制模型如下,如图4,其中DC motor模块即为无刷电动伺服电机的数学模型,而有三个霍尔传感器组成的测量装置的数学模型为图中的HALL模型[9]。
图5中用于反馈位置的控制回路采用PID控制,其中电机双闭环调速系统由转速反馈控制回路和电流反馈控制回路组成,二者均使用了PI控制器,即图中的IPID和VPID。
电动伺服舵机控制系统的传递函数如图5。
2 仿真结果分析
基于电动伺服舵机系统的传递函数模型对电动伺服舵机进行仿真分析,参数如下:
有无负载操作速度:大于0.12秒/60度;
工作环境温度:常温-零下20 ℃(常规下都能满足,无需仿真时设定);
工作电压:24V DC;
转角范围:-25度~+25度;
最大输出力矩:3.0Nm。
为了检验电动伺服舵机系统的在位置阶跃信号下动态性能特性,我们需要仿真出在1 V时的位置阶跃信号响应曲线,如图6,和转角位置阶跃信号响应曲线,如图7。通过传递函数模型图计算出传递函数后,我们可以得到电动伺服舵机的伯德图如图8。
由图6和图7可得上升时间、稳态误差和超调量,均符合一般实验所需设计要求。由伯德图8可得所设计模型幅值裕度与相角裕度均满足电动伺服舵机回路稳定性要求。
参 考 文 献
[1] 张兴国,林辉. 电动伺服舵机系统中的迭代学习控制[J]. 计算机测量与控制,2007(03):354—356.
[2] 席鹏,马瑞卿,赵跃齐. 电动舵机伺服控制系统的模糊滑模控制[J]. 微特電机,2009,37(04):31—33+37.
[3] 王银泽,李迅波. 无人机电动舵机伺服系统仿真与分析[J]. 机械研究与应用,2010(05):36—38.
[4] 陆红.飞行器电动舵机系统的设计与实现[D]. 哈尔滨工程大学,2012.
[5] 王慧娟,王道波. 一种无人机用小型双余度电动伺服舵机的设计[J]. 微电机,43(3),2010:24—27
[6] 王帅,阴玉梅,杨晓霞,等.直流电机型力促动器的控制系统设计[J].电子测量与仪器学报,2014,28(01):48—55.
[7] 符文星,孙力,于云峰,等.大力矩电动负载模拟器设计与建模[J].系统仿真学报,2009,21 (12): 3596—3598.
[8] 吴金波,李绍安,李维嘉,等.新型电动负载模拟器的控制器设计[J].自动化仪表,2010,31(3):1—4.
[11] 杨波,曹奕涛,王俊奎.基于虚拟仪器的无人机舵面负载模 拟 器[J].测 控 技 术,2009,28(4):53—57.
猜你喜欢
山东工业技术(2016年23期)2016-12-23
科学与财富(2016年26期)2016-12-01
企业技术开发·中旬刊(2016年10期)2016-11-12
电脑知识与技术(2016年22期)2016-10-31
科技视界(2016年6期)2016-07-12
科技视界(2016年12期)2016-05-25
物联网技术(2015年12期)2015-12-28
现代电子技术(2015年22期)2015-12-02
现代电子技术(2015年15期)2015-08-14
物联网技术(2015年5期)2015-07-18