一种基于WebSocket协议的车联网监控系统设计
2019-11-08 06:01狄振华
粘接 2019年9期
狄振华


摘要:目前,汽车保有量在不断的提高,以此导致的交通道路车辆管理问题在不断的提高,比如交通事故、偷车盗车及停车困难等。文章实现了基于WebSocket协议的车联网监控系统,此系统为车联网的分支研究方面,是集合现代通讯技术、卫星定位技术、地理信息技术及总线技术,并且将互联网作为基础的系统,能够实现车辆状态信息通过数据包到监控中心中传输,实现车辆监控。
关键词:WebSocket协议;车联网;监控系统
中图分类号:TP311文献标识码:A 文章编号:1001-5922(2019)09-0113-04
汽车保有量不断增加,汽车安全问题变得越来越重要,对于汽车主动安全监控方面的研究开始备受重视。随着人工智能与工业技术的飞速发展,为解决车联网及汽车主动安全监控等问题打下了良好基础,促进了车联网技术及主动安全监控技术的进一步发展。车联网属于物联网应用到汽车领域的内容,指的是将独立车辆作为基础初始信息来源,通过车联网及车载移动互联网作为支撑,根据事先的选定的通信协议及数据交换标准,在车辆和车辆、道路及互联网之间实现无线方式通讯及信息交换,以此实现交通及车辆等管理的控制,从而实现动态信息及服务的网络化、一体化及智能化。以此表示,车联网技术发展会使交通控制、汽车行驶等朝着智能化、网络化及现代化的方向发展。所以,对车联网监控系统的设计和分析具有重要的现实意义。
1车联网监控系统的设计方案
文章基于WebSocket协议实现车联网监控系统的设计,创建车联网检测系统。图1为系统的结构,主要包括车载系统及监测系统两方面。车载系统主要包括通信系统、显示及操作系统及车载定位系统,主检测系统主要包括监测及操作系统、通信系统。
车载系统通过车载GPS及北斗定位接收系统获得车辆位置信息,并且将车辆位置信息和其他的信息利用无线通信网络到监控台中传输,监控台实现全部车载系统在某时间中信息的整合,展现主检测系统地图调用界面,并且使部分信息到车联网范围中界面进行展现。此系统能够使全部车辆预警信息及位置信息的共享在同个车联网车载系统中。利用LabVIEW对检测及显示软件进行编写,从而有效实现车辆运行情况的实时共享及监控。
2车联网监控系统的设计
2.1车载终端的设计
车载终端属于分布式车载智能安防终端,主要目的就是实现运输物流企业主动的安全监控。此仪器主要是分布在汽车上的各种传感器、油箱主控机、货箱探测器、方向盘探测器和遥控器构成。能够利用无线、有线两种方式实现数据传输,此仪器主要目的就是全车主动防盗警示、非正常驾驶预警、双向主动限速、重大交通事故自动报警及救援和车辆运输安全监管。仪器主要原理为:根据仪器中的GPS模块、GPRS模块、传感器组及无线电模块、嵌入式微处理器等,对得到的传感信息及空间数据实现动态分析和计算,并且以仪器自身的算法实现安全状态的自主判断,以此能够实现车辆主动安全防护及架空。仪器中的GPRS模块能够实现上位机无线数据通信联系,最终利用GSM网络以短信息的方式和指定手机相互练习,从而实现主动安全报警及监控。
2.2感知层的设计
感知层属于数据源收集模块结构,在感知层中能够有效实现工程车辆数据收集,此数据主要包括工程车地理位置和速度,主要包括数据库所收集的故障报警、现场数据等,在感知层安装指定数据库和仪表,将各种参数信息进行展现,数据主要指的是车辆运维记录、保养维护及故障数据记录等数据。在感知层模块中添加满足VPDN网络传输的模块,本文在前端系统控制设计过程中使用具备双核处理器主从式双处理器架构,此种架构模式在实现硬件设计过程中利用独立构造模型。主处理器使用数据收集和无线远程收集,通过处理器能够保证抽取数据存储、人机交互功能。其次,对于不同厂家及公司设计工程车,利用功能模块独立化之后,对处理器和通信协议的完整性进行保证,方便后期系统升级及维护。
在感知层设计过程中,通过DSP芯片实现主处理器,DSP芯片的数据运算能力比较高,在数据存储过程中具有良好的性能。其中ADSO-BF548芯片的外设接口便于系统升级及扩展,此种芯片的性能比较高,而且在后期系统升级过程中还能够将编码新能充分展现出来。系统使用ARM实现从处理器工作,此芯片能够实现高效編程及实时调试功能,能够在工业系统控制中收集不同传感器数据。处理器工作具备外围电路支撑,此电路主要包括数据存储、总线接口及电源支撑。ADSP能够为外部数据来源提供扩展数据存储空间,通过EBIU实现统一管理,芯片还使用信号线独占方式实现DDR存储管理。
2.3数据收集设计
此系统中车辆参数收集过程主要是利用OBD II标准协议实现开发,其主要的硬件核心为TL718芯片。此标准协议实现数据读取的过程较为简单,首先对TL718芯片实现换行格式、回显格式等简单帧格式的初始化设置,大部分都是利用默认值。在实现初始化之后,根据ISO文档中的描述服务模式及参数号实现Request命令得到相应的Answer数据。针对不同Answer数据帧计算处理方式各不相同。
在获得数据过程中,OBD II标准协议获得数据的时候一切都具有完整规定文档,其主要包括所有参数相应的数据字节数、数据字节计算折合方法和最终数值单位,从而使开发难度得到降低。图2为数据收集流程。
2.4监控服务端通信
监控服务端通信主要包括SMS及GRPS两部分的通信,其中的GPRS通信指的是利用socket套接字实现的,SMS通信指的是利用串口实现的。应用程序一般通过SOCkte对网络发送数据请求,或者实现数据接受请求的相应。
Socket技术能够为网络程序进程并发通信问题的解决提供了良好途径,套接字利用远程端口及本地端口创建连接并且相互通信,所以此信息是socket网络通信基础。图3为socket原理的结构。首先,服务端实现端口侦听的开启,如果侦听到外界连接请求,从而能够和发起请求客户端创建连接。服务端在得到客户端连接以后就能够与客户端实现数据传输。
在服务端开始实现端口侦听的时候,首先通过客户端实现TcpClient类型创建,然后能够在tcpListener实例中实现AccepTCPCIient()方法得到和客户端连接,其返回对象属于client值。主要代码为:
2.5车联网安全监控系统互联
根据车联网构成元素实现的功能,划分成为三个层次网络互联结构,信息感知层为最底层,实现数据收集和融合处理,网络传输层为中间层,实现分布式终端信息利用互联网的有向传输,应用层为最高层,也就是车联网上位机系统,实现终端数据处理功能。
GPRS和Internet连接的设计模型:GPRS网络结构构成指的是GSM基站中的GPRS网络互联,此设计系统的数据要利用移动通信调试解调器通过拨号方式,和当地GPRS业务节点实现无线通信的创建,并且进人到GPRS网络中,之后利用GPRS网关和Inter-net相互连接,从而实现数据的交互。
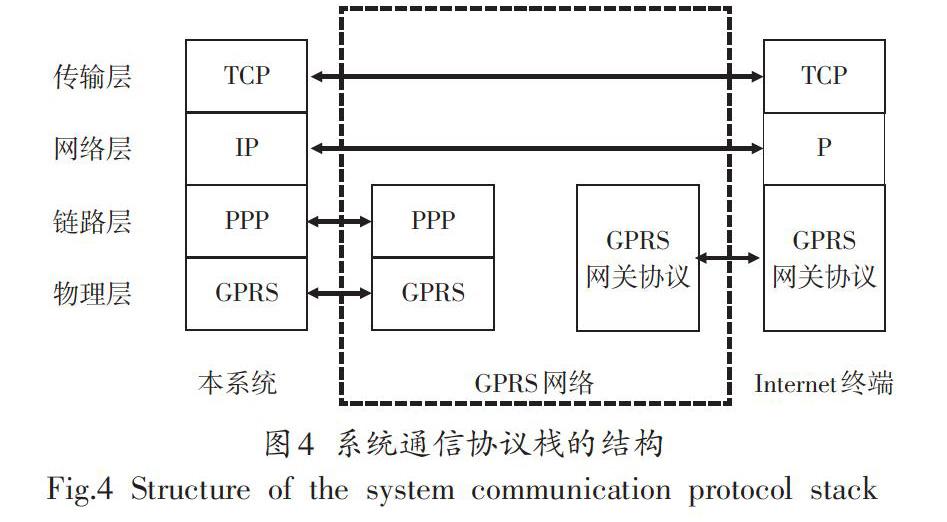
系统通信协议栈:此系统使用四层次通信协议栈结构,第一层为物理层,使用GPRS协议,ARM嵌人式微处理器通过AT指令,利用GPRS拨号方式创建系统中GPRS网络和GPRSModem网络物理通信,也就是GPRS信道。第二层为链路层,使用PPP协议。系统远程登录到Internet,并且得出GPRS网关所分配的IP地址,利用PPP协议使原始GPRS物理层连接改造成为无差错数据链路。第三层为网络层,利用IP协议方式,使接人Intemet中的终端相互联系,此终端的IP地址不同,利用IP路由进行选择和辨别,就能够使系统和接人Internet中的每个IP终端数据流转。第四层为传输层,也就是使用TCP协议方式为数据传输提高功能可靠及面向连接的服务。图4为系统通信协议栈的结构。
2.6系统测试
在实现系统設计之后对系统进行测试,系统功能最终实现边调试边修改和完善的过程。在实验测试的过程中主要包括SIM卡、车载终端、PC机、车载电源。在测试过程中,在三辆车中安装系统,开启监控客户端软件实现监控。通过测试,监控界面中能够将其实时位置和车辆参数展现出来,在三辆车运行的过程中,图标也会随车移动。通过长时间测试表示,系统运行稳定,满足实际需求。
3结语
设计基于webSocket协议的车联网监控系统能够感知车辆运行情况,对于网络区域中的货运车辆进行监控及管理,还能够实现远程车辆指挥、跟踪定位、安全防盗及事故救援等。通过次系统,能够降低交通事故、财产损失的几率,使管理效率得到提高。以上的创新设计能够在多种车辆中使用。
猜你喜欢
中国广播(2016年11期)2016-12-26
中小企业管理与科技·下旬刊(2016年10期)2016-11-18
电脑知识与技术(2016年25期)2016-11-16
科技视界(2016年18期)2016-11-03
科技视界(2016年20期)2016-09-29
电脑知识与技术(2016年17期)2016-07-23
商(2016年8期)2016-04-08
商(2016年4期)2016-03-24