
基于智能控制算法的自动驾驶系统优化研究
2019-11-12 11:38霍桂利
现代电子技术 2019年20期
霍桂利

摘 要: 针对传统自动驾驶系统的目标检测与识别模块易受到周围环境的影响而使得系统在准确性、实时性存在不足等问题,文中在分析传统算法的基础上,利用智能化控制算法中的SVM方法对现有的车辆自动化驾驶系统进行优化。该优化算法通过对输入图像特征的提取与训练得到相应的分类器模型,然后利用该模型进行目标的检测与识别。测试结果表明,该优化系统对于车道线、车辆及行人等目标的检测效率与准确率等方面均优于基于特征的传统算法,验证了该方法的可行性。
关键词: 系统优化; 智能控制算法; 自动驾驶系统; 目标识别; 边缘检测; 系统测试
中图分类号: TN876?34; TP391.99 文献标识码: A 文章编号: 1004?373X(2019)20?0177?04
Optimization of automatic driving system based on intelligent control algorithm
HUO Guili1, 2
(1. Shanxi University, Taiyuan 030006, China; 2. Shanxi Architectural College, Jinzhong 030060, China)
Abstract: Since the target detection and recognition module of traditional automatic driving system is vulnerable to the influence of the surrounding environment, which makes the system have some shortages such as insufficient accuracy and poor real?time performance, on the basis of the analysis of the traditional algorithm, the SVM method of intelligent control algorithm is used to optimize the existing vehicle automatic driving system. The optimization algorithm can obtain the corresponding classifier model by extracting and training the features of the input image, and then the model can be used to detect and recognize the targets. The feasibility of this method was verified in the system testing. The test results show that the optimized system is superior to the traditional feature?based algorithm in the aspects of detection efficiency and accuracy of lane lines, vehicles, pedestrians, etc.
Keywords: system optimization; intelligent control algorithm; automatic driving system; target recognition; edge detection; system testing
0 引 言
近年来,人工智能技术不断发展,传统汽车工业与智能化技术相结合的自动驾驶汽车应运而生。国内外众多机构也早已开始对自动驾驶领域展开研究,如谷歌、特斯拉、丰田、百度、比亚迪、大众等均已推出自动驾驶汽车[1]。对于自动驾驶系统中的目标检测模块,目前使用较多的是基于特征的检测识别算法,其算法利用目标的阴影、轮廓、颜色及方向梯度直方图等特征值来实现场景中的目标识别[2]。但这种方法在复杂路况或恶劣天气时,适用性大幅度降低,严重影响自动驾驶汽车的正常工作。因此,本文在传统系统的基础上利用SVM技术进行优化,得到基于智能控制算法的自动驾驶系统。系统测试结果表明,优化后的自动驾驶目标检测模块,对于目标的识别速度、准确度等方面相较于传统系统均有较大提升。
1 传统自动驾驶算法
在传统的自动驾驶系统与算法当中,主要是利用人工提取的特征,如HOG(方向梯度直方图)、SIFT(尺度不变特征变换)及CSS(颜色自相似)等,与计算机视觉、视频分析等技术相结合来实现车辆的自动驾驶[3]。在车辆行进的过程中,所捕捉到的实时场景视频序列中,通常包含各种影响车辆自动驾驶的目标,如行人、车辆、车道、障碍物及场景中的其他物体。自动驾驶系统需要在获取的视频中快速、准确地标识出场景中感兴趣的目标对象,从而为车辆控制系统提供重要的判断依据。在传统方法中,特征的检测与表示是自动驾驶算法中的核心部分,这涉及到如何对目标图像信息进行合理编码的问题[4]。选择合适特征并进行优化,能够使自动驾驶系统具有较强的抗干扰能力。如在存在遮挡或复杂背景的条件下,实现车辆的自动驾驶。
在基于传统特征的自动驾驶系统中,目标检测是其中最重要的模块,主要包括:道路车道线识别、车辆检测、行人识别及其他障碍物检测等。以下将详细介绍传统自动驾驶系统中目标检测的具体方法并进行分析,进而对其进行合理优化。
1.1 道路车道线识别
道路车道线的检测与识别,是车辆自动驾驶系统中的基本内容。在传统方法中,对车道线的检测大体可分为两种:基于特征的识别与基于模板的识别[5]。下面将对使用广泛基于特征的检测识别方法进行详细介绍。
在基于特征的检测方法中,需从实时获取到的视频图像中提取感兴趣的特征,比如:颜色、轮廓(边缘)、对称性及阴影等。在这些特征中,轮廓是最为重要也是最常使用的特征之一。一般车道线与周围的车道存在较明显的边缘,其之间会产生明显的亮度变化梯度。在该方法中,通常使用Canny边缘检测算子对输入的视频图像进行处理,得到图像场景的边缘。再利用Hough变换,在处理得到的边缘图像中寻找可能的车道线。
Hough变换的基本思想是[6]:利用点与线的对偶性,将原始图像空间中的特定曲线通过曲线表达形式变为参数空间的一个点。因此,把原始图像中给定曲线的检测问题转化为寻找参数空间中的峰值问题。一般采用的转换方程形式为:
图1 Hough变换算法流程
这种基于边缘提取与Hough变换的车道线识别方法相较于其他传统检测方法具有一定的优越性,但同时也存在部分问题。比如,利用该方法对车道线进行拟合时,不能确定所求得的参数值是实际参数值。尤其是存在阴影或遮挡的条件下,经常出现拟合结果偏差较大的情况。同时,该方法对于曲率较大的车道线检测准确度较低。
1.2 车辆检测
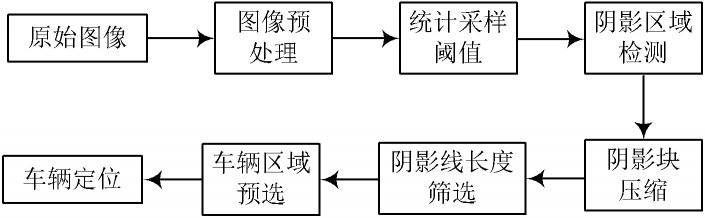
车辆检测是保障自动驾驶汽车安全行进中的关键部分,传统方法对于车辆的检测一般利用车辆的阴影特征来进行检测识别。通常车辆在正常行驶中,其对底部产生明显的阴影区域,可认为是一种鲁棒性的特征[7]。基于阴影特征的车辆检测算法流程如图2所示。
图2 传统车辆检测算法流程
基于阴影特征的车辆检测算法在阈值的选择上较容易受到周围环境光照的影响,常采用大小阈值的处理方法。大阈值由周围环境确定,小阈值则以阴影特征来确定。但在复杂环境下,该方法的准确性仍会受到较大的影响。
1.3 行人识别与防碰撞
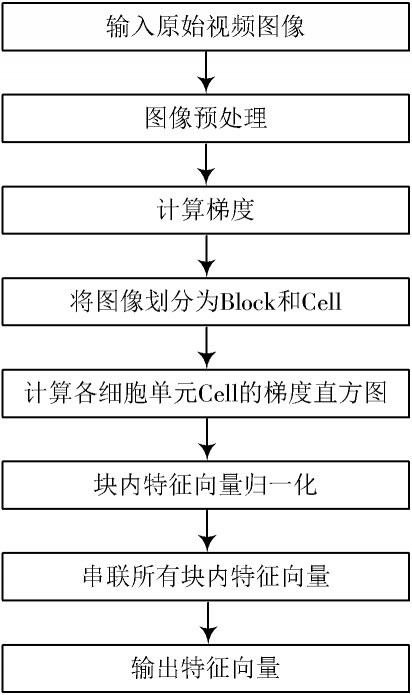
行人识别与防碰撞模块是自动驾驶系统中的研究热点、关键内容。传统技术主要利用统计学习中,特征提取与分类的检测识别算法。在特征的选择上,通常选用方向梯度直方图HOG。HOG是图像的一个基本特征,在行人检测与识别上具有较强的鲁棒性,可将视频图像中的行人准确识别与定位。HOG特征提取需先将视频图像按照一定的规则划分为多个单元块(Block),再将各Block单元细化分为若干细胞单元(Cell),并分别计算、提取其相应的直方图向量。随后将各单元的直方图向量进行合成,得到该单元块的梯度直方图向量。最后,与单元块对应的向量进行合成得到视频当前帧的梯度直方图向量[8]。其提取过程如图3所示。
HOG算法虽然能实现道路上行人的识别与检测,但仍存在两点不足:
1) 由于HOG特征提取計算量大需要消耗大量内存,导致实时性欠佳;
2) 当车辆行进到复杂背景路况时,该算法对于行人的识别度较低,抗干扰能力弱。
2 自动驾驶系统优化
通过分析基于特征的传统车辆自动驾驶系统在车道线、车辆及行人等目标检测识别过程中所存在的问题,可发现传统自动驾驶算法有较多需要优化与改进之处。本文利用智能控制算法中的SVM(支持向量机)技术,对传统自动驾驶的目标检测模块进行优化。其优化算法流程如图4所示。
图3 HOG特征提取流程
图4 传统特征与SVM结合的检测算法

SVM训练过程[9]主要可分为3步:
1) 提取训练图像中目标检测所需要的特征,并保存在文本文件中方便调用。这里不需要特殊的格式,只保存每帧图像相应的特征向量即可。
2) 将提取的特征按照SVM给定的模板进行格式化。
3) 格式化后,设定SVM的训练参数并进行训练。训练参数包括:训练所需内存大小、训练停止标准、惩罚因子、权重以及是否做概率估计等。
此外,SVM在训练过程中,需要利用核函数进行特征转换,常用的核函数包括多项式核函数、高斯核函数[10],其对应的形式如下:
本文在选择核函数时,利用车辆车载摄像头拍摄的1 000帧图像作为样本进行训练,并用300张相应图像作为检测图像,其检测结果如表1所示。

由测试结果可看出,高斯核函数在检测率与误报率上均优于多项式核函数。因此,本文选用高斯核函数作为SVM训练核函数。
3 系统测试
利用优化后的自动驾驶系统目标检测识别算法,对车载摄像头拍摄的某段实时视频图像进行测试,分别进行道路车道线识别、车辆检测及行人识别3个主要内容。测试的部分样本图像如图5所示。
图5 部分样本图像

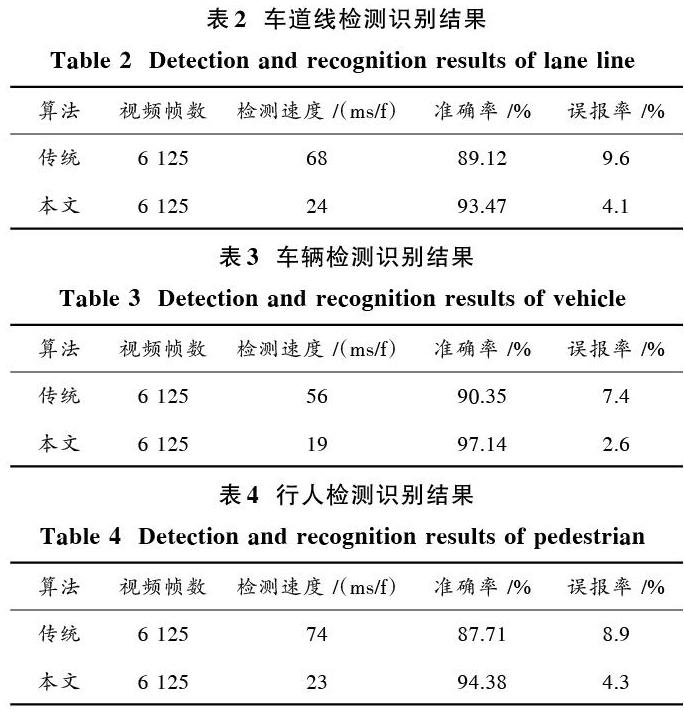
测试结果包括检测速度、检测准确率及误报率,并与传统目标检测算法进行对比,其结果如表2~表4所示。
通过3组实验结果可发现,本文优化后的算法相较于传统基于特征的自动驾驶系统目标检测算法,在检测速度与准确率上均有较大提升。同时检测的误报率也有所下降,充分验证该优化方法的可行性。
4 结 语
本文首先介绍基于特征的传统车辆自动驾驶系统,并利用轮廓特征与Hough变换的方法分析传统系统对车道线的识别过程;基于阴影特征研究传统的车辆识别算法;利用HOG特征分析行人识别与检测技术。同时,分析传统算法所存在的一些问题。针对存在的问题,本文将传统算法与SVM技术相结合,设计出基于智能化控制的自动驾驶系统。最后,对优化的系统进行测试。测试结果表明,该优化算法在准确率等方面均优于传统系统,具有较高的可靠性。
参考文献
[1] 于文涛,李海斌,刘阳.基于深度学习法的无人驾驶车中自动变速器换挡模型[J].天津职业大学学报,2018,27(6):93?96.
YU Wentao, LI Haibin, LIU Yang. Automatic transmission shift model in driverless vehicle based on deep learning method [J]. Journal of Tianjin Vocational University, 2018, 27(6): 93?96.
[2] 白辰甲.基于计算机视觉和深度学习的自动驾驶方法研究[D].哈尔滨:哈尔滨工业大学,2017.
BAI Chenjia. Research on autopilot method based on computer vision and deep learning [D]. Harbin: Harbin University of Technology, 2017.
[3] 晏欣炜,朱政泽,周奎,等.人工智能在汽车自动驾驶系统中的应用分析[J].湖北汽车工业学院学报,2018,32(1):40?46.
YAN Xinwei, ZHU Zhengze, ZHOU Kui, et al. Application analysis of artificial intelligence in autopilot system [J]. Journal of Hubei Automotive Industrial Institute, 2018, 32(1): 40?46.
[4] 袁苏哲,张祥.基于模糊控制的车辆自动驾驶前车跟随控制方法研究[J].装备制造技术,2017(11):168?169.
YUAN Suzhe, ZHANG Xiang. Research on the control method of auto?driving front car following based on fuzzy control [J]. Equipment manufacturing technology, 2017(11): 168?169.
[5] 纪明君,陈新.基于人工智能的汽车车速和方向控制分析[J].时代汽车,2018(9):29?31.
JI Mingjun, CHEN Xin. Vehicle speed and direction control analysis based on artificial intelligence [J]. Times automobile, 2018(9): 29?31.
[6] 张贵英,向函,赵勇.基于计算机视觉的自动驾驶算法研究综述[J].贵州师范学院学报,2016,32(6):14?19.
ZHANG Guiying, XIANG Han, ZHAO Yong. Review of auto?driving algorithms based on computer vision [J]. Journal of Guizhou Normal University, 2016, 32(6): 14?19.
[7] 夏伟.基于深度强化学习的自动驾驶决策仿真[D].北京:中国科学院大学,2017.
XIA Wei. Autopilot decision simulation based on deep reinforcement learning [D]. Beijing: University of Chinese Academy of Sciences, 2017.
[8] 吴琦,于海靖,谢勇,等.人工智能在自动驾驶领域的应用及启示[J].无人系统技术,2019(1):23?28.
WU Qi, YU Haijing, XIE Yong, et al. Application and enlightenment of artificial intelligence in the field of automatic driving [J]. Unmanned system technology, 2019(1): 23?28.
[9] 张斌,何明,陈希亮,等.改进DDPG算法在自动驾驶中的应用[J].计算机工程与应用,2019,55(10):264?270.
ZHANG Bin, HE Ming, CHEN Xiliang, et al. Application of improved DDPG algorithm in automatic driving [J]. Computer engineering and application, 2019, 55(10): 264?270.
[10] 刘新磊,赵星洋,王琪琛.卷积神经网络在无人驾驶感知技术上的应用[J].机械研究与应用,2019,32(1):156?159.
LIU Xinlei, ZHAO Xingyang, WANG Qichen. Application of convolutional neural network in driverless perception technology [J]. Mechanical research and application, 2019, 32(1): 156?159.
猜你喜欢
有色设备(2021年4期)2021-03-16
中国交通信息化(2017年11期)2017-06-06
电脑知识与技术(2016年28期)2016-12-21
电子技术与软件工程(2016年20期)2016-12-21
价值工程(2016年32期)2016-12-20
电脑知识与技术(2016年27期)2016-12-15
山东工业技术(2016年15期)2016-12-01
软件导刊(2016年9期)2016-11-07
科学与财富(2016年28期)2016-10-14
铜业工程(2015年4期)2015-12-29
