
防水卷材柔性码垛控制系统的设计
2019-11-22 23:58涂祟刚朱丽霞
科技风 2019年28期
涂祟刚 朱丽霞
摘要:设计一套以安川机器人和西门子PLC的柔性码垛系统,通过人机界面的控制,能够自动柔性的计算码垛数量、码垛方式和实时显示当前的码垛过程,成功应用于企业生产中,大大提高了设备的使用效率。
关键词:柔性码垛;工业机器人;人机界面;PLC
中图分类号:TP273 文献标识码:A
防水卷材是用于隧道、建筑墙体以及屋面、公路等处,能够防止地下水渗漏、抵御外界雨水。由于防水卷材的组成的材质和使用场所的不同,对于材质较硬的卷材可以选择竖放,而对于材质较软的卷材只能采取横放,而且存在着多种卷材尺寸,而传统的防水卷材码垛设备只能进行一种卷材尺寸的立式码垛,不能满足现代企业生产的要求,今设计了一套能够根据防水卷材自动调节码垛数量、调节码垛方式的柔性码垛控制系统,大大提高了码垛设备的柔性和码垛效率。
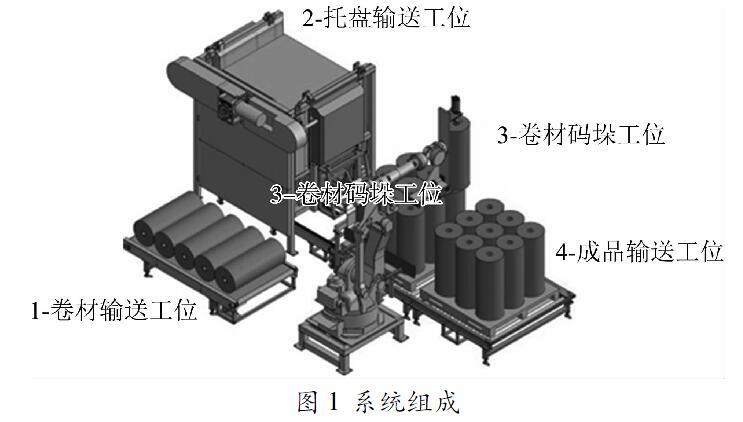
1系统组成
系统组成如图1所示。系统分为四个工位,工位1是卷材输送工位、工位2是托盘输送工位、工位3是卷材码垛工位、工位4是成品输送工位。
2控制系统设计
2.1 控制方案
该控制方案在触摸屏上可以设定产品的尺寸、重量等参数以及显示码盘上的个数,利用西门子1200 PLC为整个系统的控制器,它能够实现场安全信号及报警、产品到位信号、托盘到位信号、机器人运行保护信号的控制,采用Profibus-DP总线和安川MS165工业机器人进行总线通讯,实时传输码垛的方式和位置坐标。
2.2程序设计流程
在始状态下,托盘输送工位已经由叉车放满空托盘,整个输送线工位上没有成品或空托盘,机器人处于初始位置,根据触摸屏上设置此次放置的卷材的尺寸和放置方式,这时程序可以自动计算出托盘上卷材的放置数量和放置的位置。按下启动按钮,顶料气缸会将托盘输送工位的从倒数第二个托盘开始的所有托盘顶起,此时托盘输送工位电机和卷材码垛工位电机转动,将最底层的空托盘顺利输送至卷材码垛工位,此时如果卷材输送工位上有卷材,工业机器人将按设定好的码垛方式进行抓取码垛,同时人机界面上会动画实时显示当前的码垛情况,待一垛完成后,卷材码垛工位和成品输送工位电机同时转动,将一垛成品卷材输送至成品输送工位,等待叉车将其运走,同时托盘输送工位电机也转动,送出下一个空托盘至卷材码垛工位,周而复始。在托盘输送工位无空托盘、机器人异常、成品输送工位卷材在一定時间内未运走,都会发生报警,提示工作人员处理当前状况。
2.3机器人的程序控制
工业机器人在整个控制系统中,主要是对卷材进行不同放置方式的码垛,此时需要对工业机器人运动的位置进行计算和PLC之间进行数据的交换,通过对目标点的示教,创建了机器人码垛的主程序和子程序,如下所示:
MAIN()! // 主程序
CALL JOB:INITIAL!//调用初始化子程序
WHILE(B002=1)!//等待启动信号
CALL JOB:PICK!//调用拾取子程序
CALL JOB:PLACE IF
IN#(30)=ON!//调用位置计算子程序
CALL JOB:PLACE1 IF IN#(31)=ON!//调用竖直放置子程序
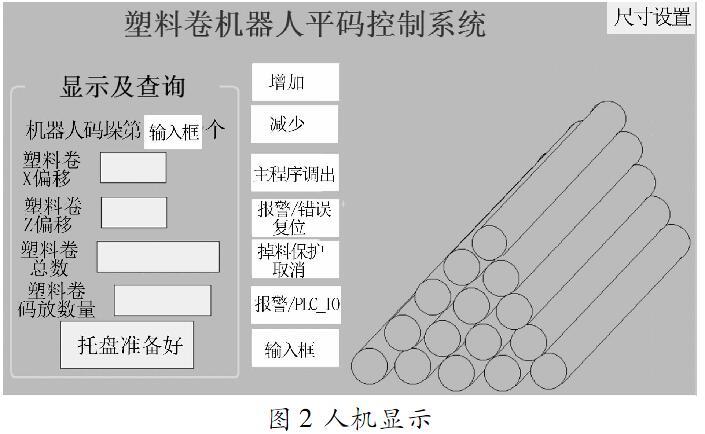
CALL JOB:PLACE2 IF IN#(32)=ON!//调用水平放置子程序2.4 人机界面设计
根据防水卷材不同材料,我们可以通过人机界面选择放置的数量和放置的方式,人机显示如图2所示。
3 结语
本系统融合了多种现代控制技术,可以根据卷材的尺寸和重量,自动调整码垛的数量,选择竖直还是水平放置方式,并且可以实时的显示当前码垛的动画。该系统运行稳定,具有一定的推广价值。
参考文献:
[1]傅刚辉,王睿,金波.高抗渗抗裂保护层在屋面抗渗中的应用[J].建筑技术,2018(06).
[2]程伟.基于西门子S7-1200控制器和松下A5伺服驱动器的码垛机急停控制的研究[J].自动化应用,2017(12).
[3]贾帅,沈兴全,肖勇.码垛机器人直驱技术研究[J].组合机床与自动化加工技术,2014(08).
作者简介:涂崇刚(1996-),男,江苏徐州人,常州轻工职业学院学生,主要研究方向:电气自动化;朱丽霞(1977-),女,江苏常州人,副教授,常州轻工职业学院教师,主要研究方向:电子信息工程。
猜你喜欢
电子乐园·下旬刊(2021年3期)2021-02-08
科技创新与应用(2019年25期)2019-09-24
电子技术与软件工程(2017年19期)2017-11-09
科技创新导报(2016年21期)2016-12-17
中小企业管理与科技·下旬刊(2016年10期)2016-11-18
科技视界(2016年18期)2016-11-03
企业导报(2016年13期)2016-07-19
