城市地下河箱涵结构测绘技术研究
2019-11-23 06:00杨超斌吴华勇李庆海
城市道桥与防洪 2019年11期
杨超斌,吴华勇,黄 帆,李庆海
(上海市建筑科学研究院,上海市200032)
0 引 言
城市河流、疏浚或排水等通道除了明挖河道,也常暗埋有地下河,地下河主体结构常采用单箱单室或多室的密闭框架箱涵结构形式[1]。
地下河箱涵结构因为其暗埋的属性,在运营年限较长后,其周边环境与原始情况必然存在较大出入,尤其邻近箱涵的保护区范围内不可避免地存在非法搭建、不正当施工现象,都会对箱涵的运营安全造成不利影响。为此需要对暗埋箱涵的地下准确位置及走向、对应的地上周边环境等参数进行测绘,排查可能影响箱涵正常工作的安全隐患,通过建模分析箱涵上部荷载变化情况,从而进一步保证箱涵的安全使用。
为解决上述难题,需综合运用无人机航空摄影测量、RTK 测量、3D 扫描等先进技术。文中依托典型的实际工程案例进行了较为系统的阐述,研究成果可为后续开展此类结构测绘工作提供一定的参考借鉴依据。
1 工程概况
上海市杨浦区杨树浦港-虬江水系地下河箱涵段位于国定路和密云路之间,全长2120 m,建于20 世纪80 年代,暗埋箱涵段为复旦大学校区地下的一条暗河,河水从东走马塘流入涵洞,经过箱涵汇入虬江。
暗埋段箱涵结构形式为单箱三室钢筋混凝土结构,结构横断面如图1 所示。地下河箱涵已长期运营了30 多年,材料老化、退化,加上污水对结构的长期腐蚀侵害,使结构出现不同程度的缺陷和损伤,特别是箱涵结构的位置走向及其地面周边环境的变迁应进行准确的勘察测绘,以评定地形地貌的变化对箱涵结构受力的影响,综合分析箱涵结构运营现状,从而分析评定结构安全。

图1 箱涵结构横截面(单位:mm)
2 主要技术手段和方法
2.1 无人机进行周边环境调查
通过无人机航空摄影测量技术对箱涵沿线的地形、地貌进行实景建模,排查可能影响箱涵正常工作的安全隐患。通过无人机航空摄影测量技术获得箱涵沿线地表的三维影像数据,可量化分析箱涵沿线附近一定范围内地形地貌的变化,查看箱涵附近是否有工程施工等不利因素[2]。将箱涵上方的地物地貌建模后,可形成立体化的三维坐标可视化数据,并结合箱涵结构整体3D 扫描成果,对箱涵对应地表的高程和覆土厚度进行分析拟合,对箱涵的结构受力分析提供可靠的数据。
无人机航空摄影测量技术的工作流程及详细技术路线如图2 所示。还应辅以人工巡查方式,组建巡查小组,通过对箱涵沿线巡视,辅以拍照、摄像、记录等方式对周边环境进行详细调查,对存在的风险点加以梳理分析,并重点排摸。

图2 无人机外业飞行技术路线
2.2 暗埋箱涵结构走向定位测量
2.2.1 测点布设
导线控制网以箱涵工作井外GPS RTK 所测的控制点为起算数据,沿箱涵行进路线布设一条导线,组成如图3 所示的附合导线。
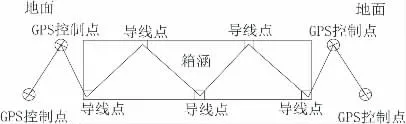
图3 导线控制网示意图
箱涵内导线点需布设强制对中台,高度约1.8~2.0 m,相邻对中台之间间距约50 m,对于全长2120 m 的箱涵段约布设42 个强制对中台。
实地布设时应注意下列几点:一是相邻点间通视良好,便于测角和量距,即确保每一个导线点与相邻导线点通视,以便后视定向、校核;二是点位应布设强制对中台,做好标志,便于安置仪器;三是导线相邻边长之比不宜大于1∶3;四是导线点应有足够的密度,分布较均匀,便于控制整个测区。
2.2.2 外业观测
由于测量作业区域的特殊性,以及为了合理安排作业时间,导线测量分两部分观测:一是箱涵工作井外地面控制测量,在每个箱涵工作井外设置2~3 个地面控制点,采用GPS RTK 方法施测。导线观测前,预先解算地面GPS 控制点之间的边长,施测过程中首先用全站仪检验控制点的精度,满足要求后进行导线测量。注意在观测中,必须观测GPS 控制点间的连接角和连接边,作为传递坐标方位角和坐标之用。二是箱涵内导线测量,待进入箱涵作业后,从第一个工作井外地面控制点起沿箱涵测至下一工作井地面控制点。箱涵内导线点全部设置在强制对中台上。
2.3 箱涵内部三维扫描
三维激光扫描技术的出现和发展为空间三维信息的获取提供了全新的技术手段,为信息数字化发展提供了必要的生存条件。三维激光扫描技术克服了传统测量技术的局限性,采用非接触主动测量方式直接获取高精度三维数据,能够对任意物体进行扫描,且没有白天和黑夜的限制,快速将现实世界的信息转换成可以处理的数据[3]。
采用三维激光扫描技术对箱涵的空间结构进行数据采集、建模,以此来量化箱涵的空间尺寸。采用三维激光扫描技术还可对箱涵表观结构进行全面数字化,包括精细化断面和激光影像数据。
为了将所有点云数据及影像资料统一至上海城市坐标系,具体施测时采用APM 绝对定位法。该定位法使用带两个棱镜的特制基座和一个球形棱镜进行组合定位,使用一台全站仪在扫描的同时跟测三个棱镜。现场工作情况如图4 所示。

图4 APM 定位法作业示意图
扫描完成后,可在TMSOffice 软件中直接使用三个棱镜的空间坐标进行点云数据的批量配准。APM 定位法的优点是内业拼接工作简单,外业工作需要一台全站仪配合。
3 测绘成果
通过无人机航拍测绘,结合箱涵结构整体3D扫描成果,对箱涵对应地表的高层和覆土厚度进行分析拟合,同时对箱涵边界的建筑物侵入情况进行分析。
本次测绘以松花江路与政修路路口为起点,里程设为0,终点位于国定路和政民路路口,里程约2000 m,全景如图5 所示。

图5 箱涵与周边环境全景

图6 杨浦地下河箱涵顶部高程及地表地物高程对比曲线图
根据地表航拍数据和箱涵3D 扫描数据分析,可以得到箱涵地表高程、箱涵顶板高程和箱涵覆土厚度数据。通过周边环境调查和箱涵测绘结果可以看出,箱涵段主要下穿政修路、复旦大学附属中学、政肃路、邯郸路、复旦大学,上方地表主要为城市交通道路、居民楼、绿化空地,地表标高平均高程约为4.76 m,箱涵覆土厚度在0.9~2.3 m。箱涵在地面的投影位置主要与7 幢建筑、2 处绿化空地发生交叉,其中里程500~550 m 附近的4 号建筑上海有联华宸酒店公寓顶部高程达25.2 m。目前发现正在施工的项目两处,后续应持续关注箱涵的病害开展及变形情况,关注后期施工是否存在堆载、卸载等工况(见图6)。
4 结 语
文中依托某城市地下河暗埋箱涵段结构测绘实际工程案例,详细阐述了该类地下结构测绘的技术方法、实施流程及成果。汇总主要研究成果包括如下几个方面:
(1)采用三维激光扫描技术对箱涵的空间结构进行数据采集、建模,以此来量化箱涵的空间尺寸,还可以检测结构的表面损伤。采用三维激光扫描技术可对箱涵表观结构进行全面数字化处理,包括精细化断面和激光影像数据,为箱涵的检测、监测、维护管理提供高效的全面检测和分析手段。
(2)通过无人机航空摄影测量技术对箱涵沿线的地形、地貌进行实景建模,排查可能影响箱涵正常工作的安全隐患,并结合箱涵结构整体3D 扫描成果,对箱涵对应地表的高程和覆土厚度进行分析拟合。
(3)导线控制网以箱涵工作井外GPS RTK 所测的控制点为起算数据,在每个箱涵工作井外设置2~3 个地面控制点,沿箱涵行径路线布设一条导线,采用GPS RTK 方法施测。施测过程中首先用全站仪检验控制点的精度,满足要求后进行导线测量,从而完成地下河暗埋箱涵结构的位置走向准确测绘。
(4)航空摄影测量、RTK 测量、3D 扫描等先进技术结合实际工程项目的综合运用,成功解决了相关工程技术难题,可为后续开展此类结构测绘工作提供一定的参考借鉴依据。
猜你喜欢
中国应急管理科学(2022年1期)2022-04-18
湖南水利水电(2021年6期)2022-01-18
铁道建筑技术(2021年4期)2021-07-21
铁道建筑技术(2021年4期)2021-07-21
纺织科学研究(2021年1期)2021-03-19
云南化工(2020年11期)2021-01-14
北京航空航天大学学报(2017年4期)2017-11-23
中国工程咨询(2017年12期)2017-01-31
电测与仪表(2016年5期)2016-04-22
电线电缆(2016年5期)2016-02-27