
基于PID算法的海工升降平台自动调平系统
2019-11-28 15:47蒋佳利毛泽江
科技创新与应用 2019年31期
关键词:系统
蒋佳利 毛泽江
摘 要:基于PID算法的自动调平系统是一种操作简单、自动化程度高,且安全可靠的海工升降平台自动调平系统。海工升降平台(Liftboat)在升降过程中,用自动调平技术代替人工手动调平,简化了升降平台的调平操作,提高了操作的安全性,同时也大大提高了升降平台的升降效率。
关键词:自动调平;PID算法;系统
中图分类号:TP27 文献标志码:A 文章编号:2095-2945(2019)31-0059-02
Abstract: The automatic leveling system based on PID algorithm is a kind of automatic leveling system for marine lifting platform, which has the advantages of simple operation, high degree of automation and safety. In the lifting process of the marine Liftboat, the automatic leveling technology is used instead of manual leveling, which not only simplifies the leveling operation of the lifting platform, improves the safety of the operation, but also greatly improves the lifting efficiency of the lifting platform.
Keywords: automatic leveling; PID algorithm; system
引言
現有的海工升降平台(Liftboat)采用的是人工手动调平技术,即在升降作业过程中,升降平台(Liftboat)倾斜角度值超过限制值,倾斜超限报警,操作人员立即停止升降作业。切换至单桩升降工况,单独升降在升降过程中速度过慢的桩腿,当平台倾斜角度值调节至允许范围内,人工手动调平完成。切换至多桩联动升降工况,继续进行升降作业。[1]在整个升降过程中,多次的调平耗时太多,从而降低了整个升降平台的工作效率。人工手动调平需要操作人员先根据倾斜角度值来进行调平,这样对操作人员的操作能力要求高,可操作性不强。而且仅凭倾角角度单一信号,容易造成判断失误。[2]
因此,用一种新型的自动调平系统代替传统的人工调平系统,不仅可以简化平台调平操作,提高了操作的安全性,同时也大大提高了工作效率。
1 自动调平系统简介
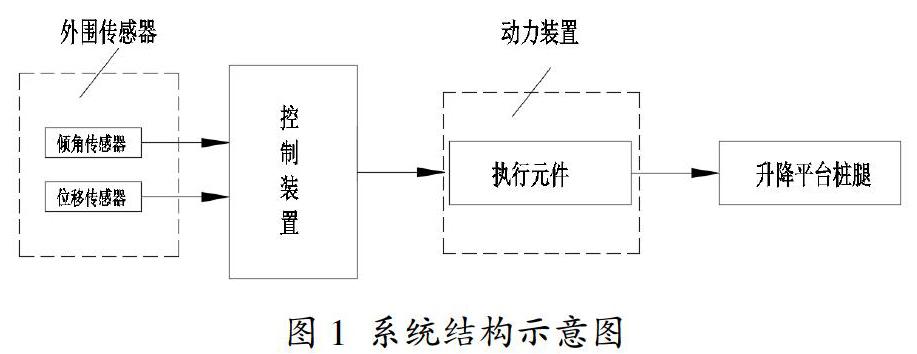
海工升降平台(Liftboat)自动调平系统由外围传感器、控制装置、执行元件组成,其系统结构示意图如图1所示。
2 基于PID算法的自动调平控制逻辑
2.1 自动调平控制逻辑流程框图
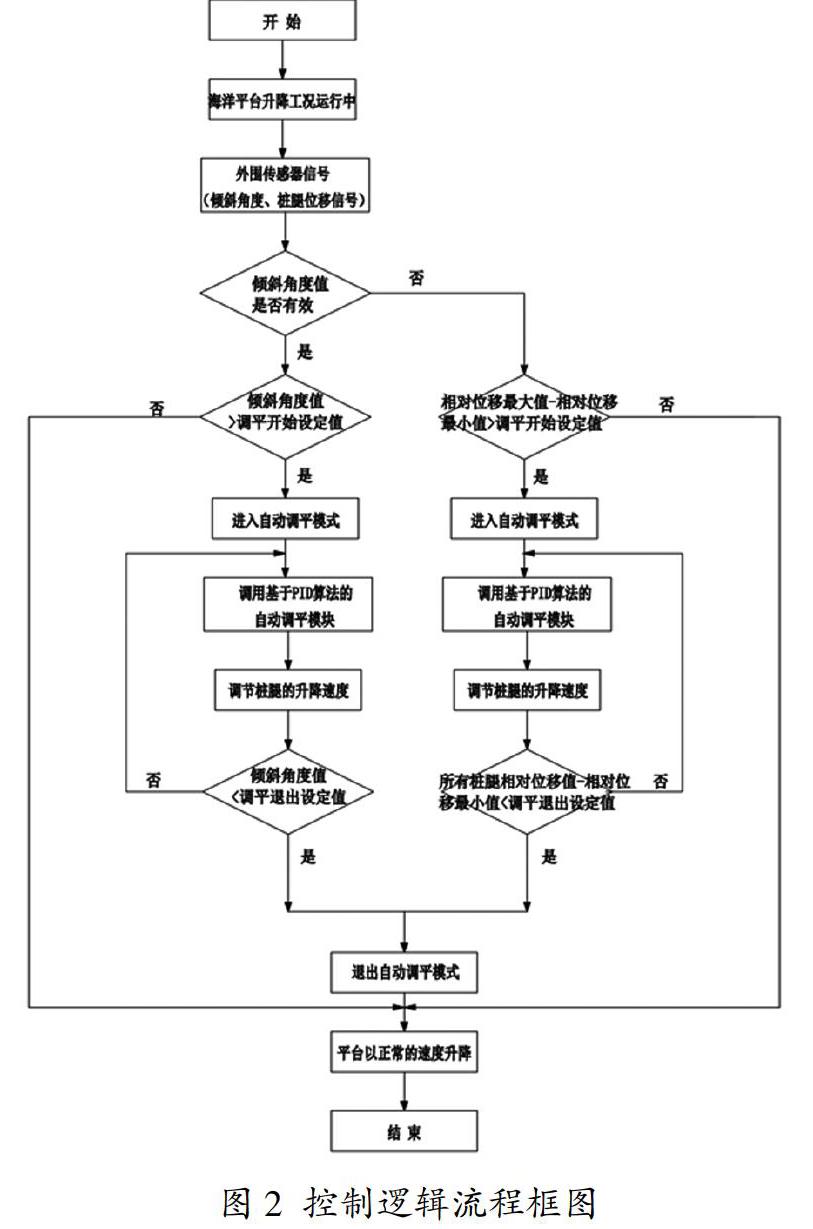
海工升降平台自动调平系统基于PID算法,根据平台的倾斜角度值或桩腿位置值来调节整个平台的倾斜度。控制逻辑流程框图如图2所示。
2.2 自动调平控制逻辑
基于PID算法的自动调平控制逻辑包括以倾斜角度值Q作为自动调平判断信号的控制逻辑和以桩腿相对位置值S作为自动调平判断信号的控制逻辑,桩腿相对位置值S为冗余信号。
倾斜角度值Q有效时,倾斜角度值Q优先作为自动调平的判断信号;若倾斜角度值Q失效时,自动切换用桩腿相对位置值S作为自动调平的判断信号。
2.2.1 基于倾斜角度信号的自动调平逻辑控制
(1)调速桩腿的确定
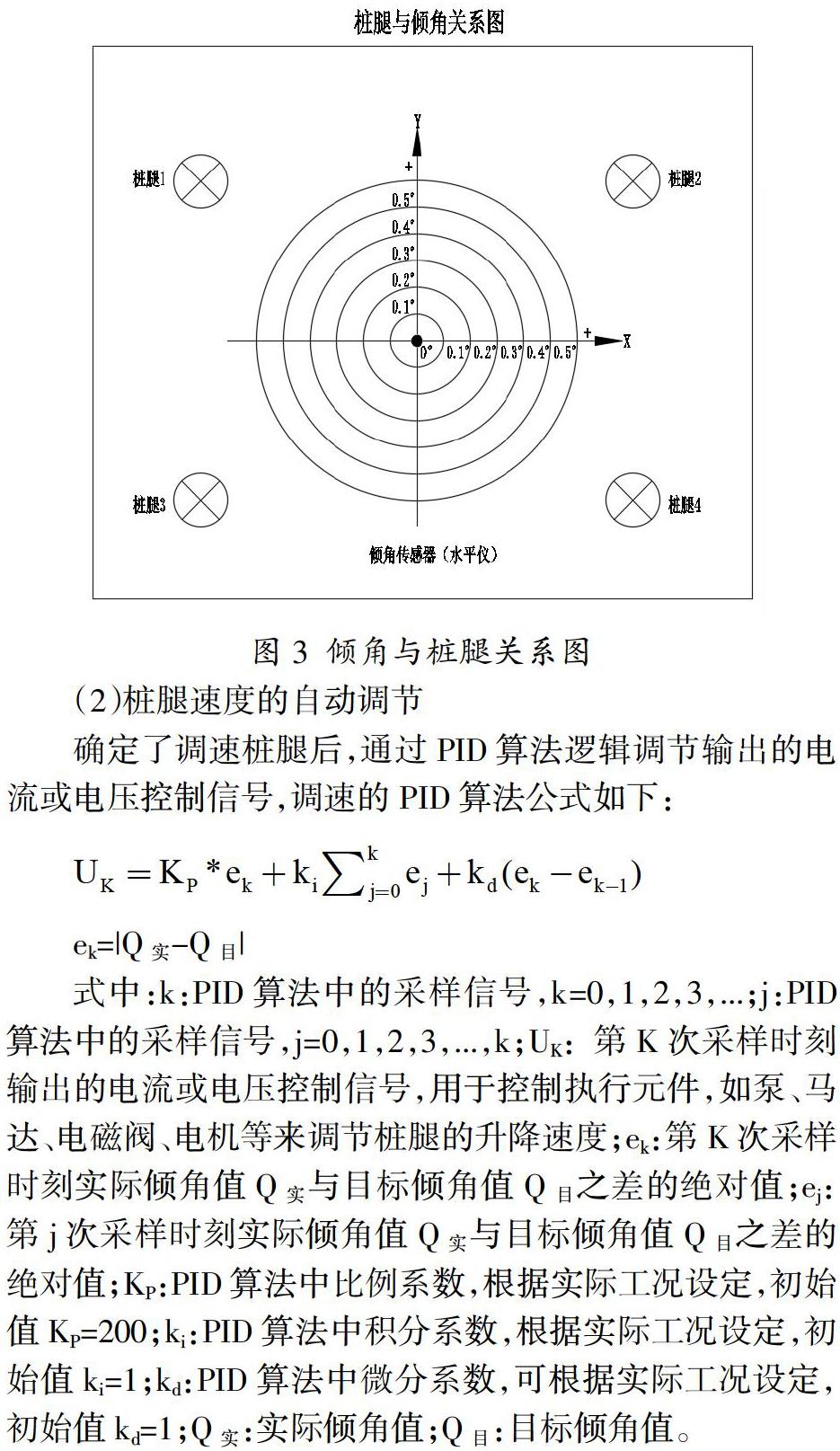
根据平台倾斜角度限制值Q先确定升降速度过快需要调速的桩腿;倾角与桩腿关系图如图3所示,桩腿按顺时针方向分别为桩腿1、2、3、4,QX为X轴倾斜角度值,QY为Y轴倾斜角度值,根据桩腿与倾角的关系图,平台上升工况,若QX>倾角限制值Q,桩腿2、4上升速度过快;若QX<-倾角限制值Q,桩腿1、3上升速度过快;若QY>倾角限制值Q,桩腿1、2上升速度过快;若QY<-倾角限制值Q,桩腿3、4上升速度过快;平台下降工况,若QX>倾角限制值,桩腿1、3下降速度过快;若QX<-倾角限制值Q,桩腿2、4下降速度过快;若QY>倾角限制值Q,桩腿3、4下降速度过快;若QY<-倾角限制值Q,桩腿1、2下降速度过快。
(2)桩腿速度的自动调节
确定了调速桩腿后,通过PID算法逻辑调节输出的电流或电压控制信号,调速的PID算法公式如下:
ek=|Q实-Q目|
式中:k:PID算法中的采样信号,k=0,1,2,3,...;j:PID算法中的采样信号,j=0,1,2,3,...,k;UK:第K次采样时刻输出的电流或电压控制信号,用于控制执行元件,如泵、马达、电磁阀、电机等来调节桩腿的升降速度;ek:第K次采样时刻实际倾角值Q实与目标倾角值Q目之差的绝对值;ej:第j次采样时刻实际倾角值Q实与目标倾角值Q目之差的绝对值;KP:PID算法中比例系数,根据实际工况设定,初始值KP=200;ki:PID算法中积分系数,根据实际工况设定,初始值ki=1;kd:PID算法中微分系数,可根据实际工况设定,初始值kd=1;Q实:实际倾角值;Q目:目标倾角值。
基于PID算法的自动调平模块根据实际倾角值与目标倾角值之差的绝对值ek,实时输出电流或电压控制信号UK,控制执行元件来调节桩腿的升降速度;当升降平台倾斜角度绝对值小于调平停止设定值,控制系统退出自动调平模式,平台按正常升降速度进行升降。
2.2.2 基于桩腿相对位置信号的自动调平逻辑控制
当倾斜角度值Q失效时,自动切换用桩腿相对位置值S作为自动调平的判断信号,控制逻辑流程如下:
(1)调速桩腿的确定
实际相对位移值S实与相对位移最小值Smin之差ek大于调平开始设定值,平台进入自动调平模式。
(2)桩腿速度的自动调节
以相对位移最小值Smin的桩腿为基准,通过PID算法逻辑调节输出的电流或电压控制信号,调速的PID算法公式如下:
Ek=S实-Smin
式中:k:PID算法中的采样信号,k=0,1,2,3,...;j:PID算法中的采样信号,j=0,1,2,3,...,k;UK:第K次采样时刻输出的电流或电压控制信号,用于控制执行元件,如泵、马达、电磁阀、电机等来调节桩腿的升降速度;Ek:第K次采样时刻桩腿实际相对位移值S实与相对位移最小值Smin之差;Ej:第j次采样时刻桩腿实际相对位移值S实与相对位移最小值Smin之差;KP:PID算法中比例系数,根据实际工况设定,初始值KP=50;ki:PID算法中积分系数,根据实际工况设定,初始值ki=1;kd:PID算法中微分系数,可根据实际工况设定,初始值kd=1;S实:桩腿实际相对位移值;Smin:桩腿相对位移最小值。
基于PID算法的自动调平模块根据桩腿实际相对位移值S实与相对位移最小值Smin之差Ek,实时输出电流或电压控制信号UK,控制执行元件来调节桩腿的升降速度。
当所有桩腿实际相对位移值S实与相对位移最小值Smin之差小于调平停止设定值,所述调平停止设定值可根據实际工况设定,控制系统退出自动调平模式,平台按正常升降速度进行升降。
3 结论
基于PID算法的海工升降平台自动调平系统的优势在于海工升降平台(Liftboat)在升降作业时,边升降边调平,无缝对接,无须操作人员值守,从而简化了海工升降平台(Liftboat)调平操作,操作更加简单,自动化程度高;平台倾斜角度值始终保持在安全允许的角度范围内,提高了升降系统的安全可靠性。
参考文献:
[1]孙东昌,潘斌.海洋自升式移动平台设计与研究[M].上海:上海交通大学出版社,2008:22-26.
[2]黄维学,刘放.自升式海上钻井平台升降系统技术特点分析[J].设计与计算,2011(2):69-71.
猜你喜欢
科学家(2022年3期)2022-04-11
小学阅读指南·低年级版(2020年11期)2020-11-16
智富时代(2019年7期)2019-08-16
智富时代(2019年7期)2019-08-16
智富时代(2019年7期)2019-08-16
智富时代(2019年7期)2019-08-16
现代兵器(2016年10期)2016-10-26
新高考·高一物理(2016年3期)2016-05-18
金融周刊(2015年1期)2015-08-24
爆笑show(2015年1期)2015-03-26
