
智能无人车纵向运动控制方法研究
2019-11-30 03:47高琳琳唐风敏夏海鹏
汽车电器 2019年11期
高琳琳, 戎 辉, 唐风敏, 郭 篷,何 佳, 夏海鹏
(1.天津大学,天津 300072;2.中汽研 (天津)汽车工程研究院有限公司,天津 300300;3.中国汽车技术研究中心有限公司,天津 300300)
智能无人车是智能交通系统的重要组成部分,也是目前整个汽车行业的研发焦点。运动控制是自动驾驶技术的3大核心问题之一,其可以进一步划分为纵向运动控制与横向运动控制[1]。纵向运动控制是无人车运动控制的基础,其主要控制目标是对期望车速的跟踪,实现汽车加速、制动、车速保持等功能。
纵向运动控制方法是纵向运动控制的核心,其不仅决定了无人车对期望车速的跟踪精度,也决定了整车的舒适性,纵向稳定性。针对智能无人车纵向运动控制方法的研究,近年来已取得了不少研究成果。就现有研究成果而言,PID控制在纵向运动控制领域有着相当广泛的应用。如,卡梅隆大学智能车团队的Boss智能车即设计了两个PID控制器分别对加速、制动执行机构进行控制,完成对期望车速的跟踪[2]。与Boss智能车相同,北京工业大学的BJUT-IV[3]、南京理工大学的“巡洋舰”[4]以及中国科学院的“北极星”[5]也都采用了相同的控制策略及PID控制器实现对期望车速的跟踪。
基于此,本文综合考虑智能无人车驱动、制动执行系统特点,分别设计了驱动、制动控制器以及两者间的切换逻辑,实现对期望车速跟踪的同时,保证驱动、制动系统的平稳过渡。最后,通过Carsim/Simulink联合仿真验证设计的纵向运动控制系统的有效性。
1 纵向运动控制系统结构
考虑到一般情况下智能无人车采用集中式驱动系统 (发动机或电机),其控制量为节气门开度 (或电机驱动信号);制动系统一般采用液压制动,其控制量为制动踏板力或制动总缸压力。为此,文中设计的纵向运动控制系统结构如图1所示。该结构包括驱动控制器、制动控制器以及两者间的切换逻辑3个部分组成。驱动控制器选择单神经元PSD控制器,以此提高控制精度;制动控制器选择增量式PID控制器,并在输出端添加一个惯性环节,以此保证系统输出控制量的平稳过渡,防止出现较大冲击。切换逻辑以期望车速与实际车速间的差值作为判断依据,切换驱动、制动控制器的工作,保证车辆正常行驶。

图1 纵向控制系统结构
2 纵向运动控制系统设计
2.1 驱动控制器设计
针对智能无人车的驱动控制问题,文中设计了一个单神经元PSD驱动控制器。单神经元PSD控制方法是一种以PID控制为基础,可实现控制参数自适应的智能控制方法。设计的单神经元PSD驱动控制器以期望车速Vdes与实际车速Vx间的差值ev作为控制器输入,以节气门开度ud作为控制器输出,其具体控制律可以描述为:

式中:g1、g2、g3——单神经元PSD控制器的权值;K——控制器增益系数。
单神经元PSD控制最大的特点是其可以依据当前时刻控制误差进行权值的自学习、自调整,以此实现整个控制器参数的自适应,其权值调整学习算法可以描述为:
式中:dI、dP、dD——权值的学习速率;z(k)——教师信号,且有z(k)=ev(k)。
2.2 制动控制器设计
对于制动系统而言,其控制量应该尽量避免较大冲击,由于单神经元PSD控制器较为依赖权值的调整,因此,文中制动控制器选用增量式PID控制器。该控制器同样以期望车速Vdes与实际车速Vx间的差值ev作为控制器输入,以制动踏板力ub作为控制器输出,其控制律描述如下:
式中:kb_p——制动控制比例系数;kb_i——制动控制积分系数;kb_d——制动控制微分系数。
对于制动控制,为保证系统平稳,降低超调进而避免频繁启动,因此在系统中加入一个惯性环节,即制动系统输出改进为:

2.3 切换逻辑
汽车在实际行驶过程中,驱动、制动系统不会同时工作,也不会频繁切换,为此,需在驱动、制动控制系统的基础上设计一定的切换逻辑,保证两个系统的顺利工作。目前,针对切换逻辑部分,文中采用一种基于车速误差阈值的切换逻辑,如图2所示,其具体原理如下。
1)判断车速误差ev与设定的切换阈值ev_th间的大小关系。
2)若ev<ev_th,则关闭驱动系统,开启制动系统。
3)若ev_th≤ev≤0,则驱动系统,制动系统同时关闭。
4)若ev>0,则开启驱动系统,关闭制动系统。

图2 切换逻辑原理
3 仿真试验分析
为验证分析设计的纵向运动控制系统,文中采用Carsim/Simulink联合仿真的形式对其进行测试。具体测试工况为:智能无人车以0km/h起步,在10s内匀加速至20km/h(加速度约0.55m/s2),保持均速5s后,在15s内匀加速至80km/h (加速度约1.1m/s2),保持均速5s后,在25s内减速至停车 (减速度约0.88m/s2)。
测试结果如图3所示。其中,图3a为期望车速与实际车速对比曲线,图3b为期望车速的跟踪误差,图3c为节气门开度变化曲线,图3d为制动踏板力变化曲线。通过图3a和图3b可以看出,无论是驱动控制器还是制动控制器,都能较好地跟踪期望车速,并将车速误差保持在较小范围 (最大误差约1.18km/h);通过图3c和图3d可以看出,驱动系统与制动系统并未出现频繁切换的问题,只在车速处于0~6km/h范围出现两次切换,这是由于车辆的怠速特性所致。
4 结论
本文在综合考虑了一般智能无人车驱动、制动执行系统特点的基础上,采用单神经元PSD控制策略设计了驱动控制器,采用增量式PID控制策略设计了制动控制器,同时设计了两者的切换逻辑,保证驱动、制动系统的正常工作。最后,文中通过Carsim/Simulink联合仿真对设计的纵向运动控制系统进行测试,结果表明,设计的纵向运动控制系统能够有效跟踪期望车速,且不会出现驱、制动系统的频繁切换。
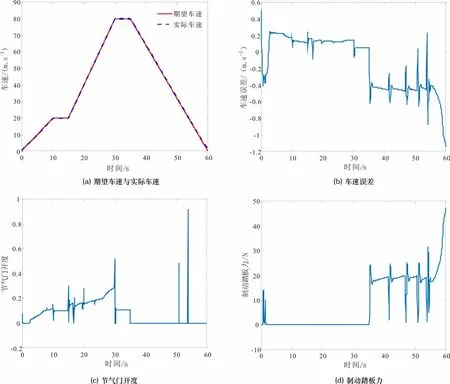
图3 纵向运动控制系统测试结果
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
中国自行车(2022年3期)2022-06-30
电子产品世界(2021年8期)2021-01-16
客车技术与研究(2019年2期)2019-11-26
网络空间安全(2019年8期)2019-03-18
中国计算机报(2019年49期)2019-02-07
汽车杂志(2018年6期)2018-06-25
中国新闻周刊(2017年36期)2017-10-21
作文周刊·小学一年级版(2017年27期)2017-08-10
创新时代(2016年8期)2016-10-21
