基于神经网络算法的皮革裁断智能分拣方法研究
2019-12-02 02:31廖东进
科技视界 2019年32期
关键词:神经网络
廖东进
【摘 要】皮革制品冲裁加工涉及送料、分拣、液压随动阀、多轴驱动电机等多机设备的控制。为了提高皮革裁断分拣的速度与精度,本文以皮革成品的面积、椭圆度、各向异性和表面纹理等特征为向量,采用基于最小均方delta规则神经网络的目标识别方法,智能识别裁断样品;在皮革裁断加工过程中,考虑到背景光线变化会对分拣系统造成的不准确性问题,采用了背景差分法,以此获取运动工件的精准图像坐标,以此提高皮革裁断加工的分拣效率。
【关键词】皮革裁断;智能分拣;神经网络
中图分类号: TS531文献标识码: A 文章编号: 2095-2457(2019)32-0048-002
DOI:10.19694/j.cnki.issn2095-2457.2019.32.019
0 引言
随着我国居民生活水平的提高,服务型消费得到了较大提高,在此影响下,皮革制品市场得到了大幅度提升;另外,随着我国劳动成本的提高,这就要求皮革制品生产需向自动化、数字化、网络化和智能化加工生产模式转变,以此提升皮革制品的加工效率。
目前,我国皮革制品加工生产装备已完成机械化升级改造,同皮革制品纯手工加工相比,皮革制品机械化加工对扩大生产规模、提高生产效率和减轻劳动强度等发挥了重要作用。但也带来了革原料利用率、加工品质低等问题,特别是机械化加工难以生产高端皮革制品产品,这不仅增加皮革制品的生产成本,而且严重制约我国皮革制品在国际市场上的竞争力。
皮革智能裁断系统涉及皮革样品的送料、分拣、液压随动阀、多轴驱动电机等多机设备的协调控制。在皮革制品分拣阶段,为提高皮革裁断分拣的速度与精度,本文以皮革成品的面积、椭圆度、各向异性和表面纹理等特征为向量,采用基于最小均方delta规则神经网络的目标识别方法,智能识别裁断样品;在皮革裁断加工过程中,考虑到背景光线变化会对分拣系统造成的不准确性问题,采用了背景差分法,以此获取运动工件的精准图像坐标,以此提高皮革裁断加工的分拣效率。
1 皮革裁断样品特征提取
在皮革加工过程,用描述子定量描绘不同成品目标即工件图像特征信息,如面积、椭圆度、各向异性和表面纹理等,每个工件类别都是多个描述子集合,每个描述子描绘工件的某项特征,用这些特征组成的向量x=[x1,x2,…,xn]描述皮革裁断加工成品,其中,xi为第i个描述子,n为与该工件有关的描述子的总数,则一类工件就可以用向量x表示。向量x的每个分量性质是由所识别的工件特征决定的,特征的选取很大程度上影响工件的分类。选取工件的面积和各向异性作为两个特征。每种工件由两个描述子来表示,于是生成了一个二维特征向量x=[x1,x2],其中和分别代表工件的面积和各向异性。由于工件的面积和各向异性不同,描述这些工件的特征向量也不一样,这些差别不但体现在不同类的工作之间,也体现在同类工件中,通过上述特征提取构建各样品特征向量。
2 基于最小均方delta规则神经网络能分拣方法
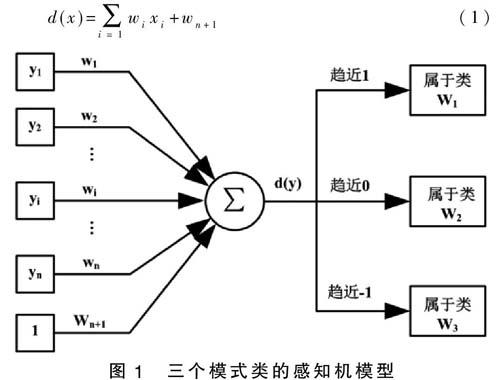
为了提高皮革裁断分拣的速度与精度,本项目使用感知机学习所需决策函数,需要区分三个训练集或模式类(w1,w2,w3),采用如图1所示的三个模式类的感知机模型。感知机的响应用它输入的加权和来表示,即
d(x)=■w■x■+w■(1)
图1 三个模式类的感知机模型
其中,wi为权值,i=1,2,…,n+1;d(x)为感知机的响应。训练时,当训练向量x来自类W1时,期望响应为1;当x来自类W2时,期望响应为0;当x来自类W3时,期望响应为-1。为了更方便表示,将向量x进行扩充,用y=[x1,x2,…,xn,1]表示扩充后的模式向量,权向量记作w=[w1,w2,…,wn,wn+1]。则感知机响应:
d(y)=■wiyi=wTy(2)
在训练时,采用感知机训练的最小均方delta规则,此规则可以在有限步的学习后使得感知机的实际响应逼近期望响应,使两者的误差最小。准则函数为
J(w)=■(r-w■y)■(3)
式中,r是感知机的期望响应,易知在r=wTy时该准则函数取得最小值。故可以用梯度下降法逐步修正权值向量w,当J(w)取得最小值时,感知机可以正确分类。设w(k)为第k步迭代中的权值向量,则一般的梯度下降算法可以表示为
w(k+1)=w(k)-α·■■(4)
其中,w(k+1)是w的迭代值;α是修正系数,α>0。由式(3)可以计算出
■=-(r-wTy)y(5)
代入式(4)可得
w(k+1)=w(k)+α·[r(k)-wT(k)y(k)]y(k)(6)
其中初始向量w(1)=0。
定义权值向量的增量delta为
Δw=w(k+1)-w(k)(7)
按照delta修正算法将式(7)改写为
Δw=α·e(k)y(k)(8)
其中e(k)=r(k)-wT(k)y(k),它是权值向量为w(k)时产生的误差。在学习过程中,误差变化为
Δe(k)=[r(k)-wT(k+1)y(k)]-[r(k)-wT(k)y(k)]
=-[wT(k+1)-wT(k)]y(k)(9)
=-ΔwTy(k)
将式(8)代入式(9),可得
Δe(k)=-α·e(k)yT(k)y(k)=-α·e(k)‖y(k)‖2(10)
因為α>0,分析式(10)可知,当误差e(k)>0时,Δe(k)<0,即e(k)将趋近于0;当e(k)<0时,Δe(k)>0,即e(k)也将趋近于0,所以算法使得实际响应的均方误差最小。α的选择影响着学习过程的收敛速度和稳定性,一般要求0.1<α<1,在实际应用中应该根据感知机学习效果选择合适的α。
3 皮革裁断加工成品智能分拣系统
在皮革裁断加工过程中,背景光线变化会对分拣系统造成很大的不准确性问题,因此本项目采用背景差分法获得运动工件的图像坐标。定义image(x,y)为当前帧,acc(x,y)为背景模型,frimage(x,y)为前景帧,α为背景更新率,其范围为0~1,acc(x,y)初始化为0。
acc(x,y)=α*image(x,y)+(1-α)*acc(x,y)(11)
frimage(x,y)=image(x,y)-acc(x,y)(12)
运动工件的姿态检测先通过灰度处理,再寻找在所选检测方向上梯度值超过阈值的点,对这些点进行直线拟合,计算出角度。最后根据分离的前景图像,检测出工件位置。
将摄像机垂直于工作平面安装,世界坐标系位于工作平面,Z轴垂直平面向下,摄像机坐标系与世界坐标系无旋转,只存在平移关系,于是有旋转矩阵R=I(单位阵)且平移矩阵P=[0,d,0]T,d是攝像机光轴中心点Oc到工作平面的距离,则
x■y■z■1=■x■y■z■1=x■y■d1(13)
其中,(xc,yc,zc)为景物点在摄像机坐标系下的坐标,(xw,yw,zw)为景物点在世界坐标系下的坐标。由上式可以获得景物点在摄像机坐标系下的坐标,则xc=xw和yc=yw,在工作平面上运动工件的坐标zw=0。令(u,v)是参考点的图像坐标;(u1,v1)是点P1的图像坐标,(x■,y■)为点P1的二维世界坐标;(u2,v2)是点P2的图像坐标,(x■,y■)为点P2的二维世界坐标;(u0,v0)是摄像机光轴中心的图像坐标;k■=kx/d和k■=ky/d是标定出的摄像机参数,则坐标变换
x■=x■+(u■-u■)/k■y■=y■+(v■-v■)/k■(14)
其中,(u■-vi)是任意一点Pi的二维世界坐标。
由于广角摄像头会有畸变,其中以径向畸变最为明显,因此用线性回归方法拟合出摄像机的径向畸变矩阵。首先给出径向畸变的畸变方程
u'v'=■[■]■(15)
其中,(u,v)为参考点的图像坐标,(u',v')为参考点畸变校正后的图像坐标,ast和bst为校正系数,s,t=0,1,2。工件的类型识别要采集各种工件的样本,对各样本进行特征检测,并训练形状模型,建立工件样本数据库。然后对实时图像的感兴趣区域中目标的特征进行检测,并与数据库中的模型进行匹配,计算出匹配值,选取匹配值最高的结果作为分类器的输出。
4 总结
在皮革制品冲裁加工过程中,样品分拣的速度与精度直接关系到皮革裁断系统的效率。文本采用基于最小均方delta规则神经网络的目标识别方法,智能识别裁断样品;在皮革裁断加工过程中,考虑到背景光线变化会对分拣系统造成的不准确性问题,采用了背景差分法,根据分离的前景图像,检测出工件位置,以此获取运动工件的精准图像坐标,提高皮革裁断加工的分拣效率。
【参考文献】
[1]余世明.基于工业互联网的皮革优化排样与多机协调裁断技术及应用[J].工业控制计算机,2018(6):80-84.
[2]何德峰.具有摩擦力补偿的液压裁断数控机床轮廓预测控制算法[J].工业控制计算机,2018(5):61-63.
[3]朱海涛.基于最小均方delta规则的神经网络工件识别[J].浙江工业大学学报,2014(2):219-236.
[4]杨世凤,章对磊,杨烨,等.裁断机实时监控与故障诊断专家系统[J].自动化与仪表,2014,29(11):8-11,48.
[5]李根,李培江.液压裁断机远程监控系统的研究[J].科技展望,2016,26(25):132-133.
猜你喜欢
现代电力(2022年2期)2022-05-23
装备制造技术(2020年11期)2021-01-26
电子制作(2019年19期)2019-11-23
电子制作(2019年12期)2019-07-16
中国生物医学工程学报(2019年5期)2019-07-16
通信电源技术(2018年3期)2018-06-26
重型机械(2016年1期)2016-03-01
大连工业大学学报(2015年4期)2015-12-11
海军航空大学学报(2015年4期)2015-02-27
电测与仪表(2014年20期)2014-04-04