导引头性能可视化数据获取方法
2019-12-13 02:13张三喜张伟光张思琪吴海英
应用光学 2019年6期
张三喜,张伟光,张思琪,吴海英
(1.中国人民解放军63870部队,陕西 华阴 714200;2.西安现代控制技术研究所,陕西 西安 710049)
引言
目前,制导武器系统制导精度、跟踪稳定性、抗干扰性能以及战场环境适应性等关键指标和作战能力的试验和考核主要采取室内仿真评估、室外挂飞和外场实弹射击的方法[1-5]。室内仿真试验,导引头面向的是仿真的大气环境、目标特性、干扰和试验场景,受模拟条件的限制,室内仿真建模过于理想,对目标环境瞬变作用机理描述及复现的可信度偏低,导弹脱靶、失控、受干扰丢失目标等现象与复杂环境之间的关联关系分析困难。导引头室外挂飞试验,可以模拟导弹飞行轨迹和提供真实的靶标和背景,弥补了室内仿真和实弹射击的不足。但室外导引头挂飞试验不但成本很高,而且飞机在飞行过程中不能给导引头提供姿态运动,定量测试困难。外场实弹射击试验样本量非常有限,通常设定单一目标环境且无法保证射击条件的一致性,只能取近似窗口,难以全面考核出武器系统对环境和干扰的适应性。
为了在真实的大气环境、干扰和目标特性的条件下获取导引头的性能参数,并为仿真试验提供数据支撑,迫切寻求一种介于室内仿真与外场实弹试验之间的中间验证考核环节,在靶场真实环境下针对实际靶标目标进行静态、动态跟踪试验,可为室内仿真提供目标背景的直接驱动数据,提升仿真逼真度,同时也可多次重复考核制导导引环节的关键能力,弥补实弹射击试验数量的不足。在这种近真实战场环境下开展制导武器系统的实装作战效能试验,并与仿真分析预测结果进行对比验证,可以实现体系贡献率评估的量化外推与结论闭环[6-10]。在这方面,国内外都开展了大量的研究工作,目前主要的试验方法有以下三种。
1) 导引头开环跟踪试验
将导引头架设在固定点位或移动平台上[6],在真实环境条件下选择适当航路,利用真实目标的运动来检验导引头的各项性能指标,如导引头作用距离、目标选择性、捕捉可靠性、跟踪稳定性、跟踪精度、环境适应能力以及抗干扰性能等,如图1所示。
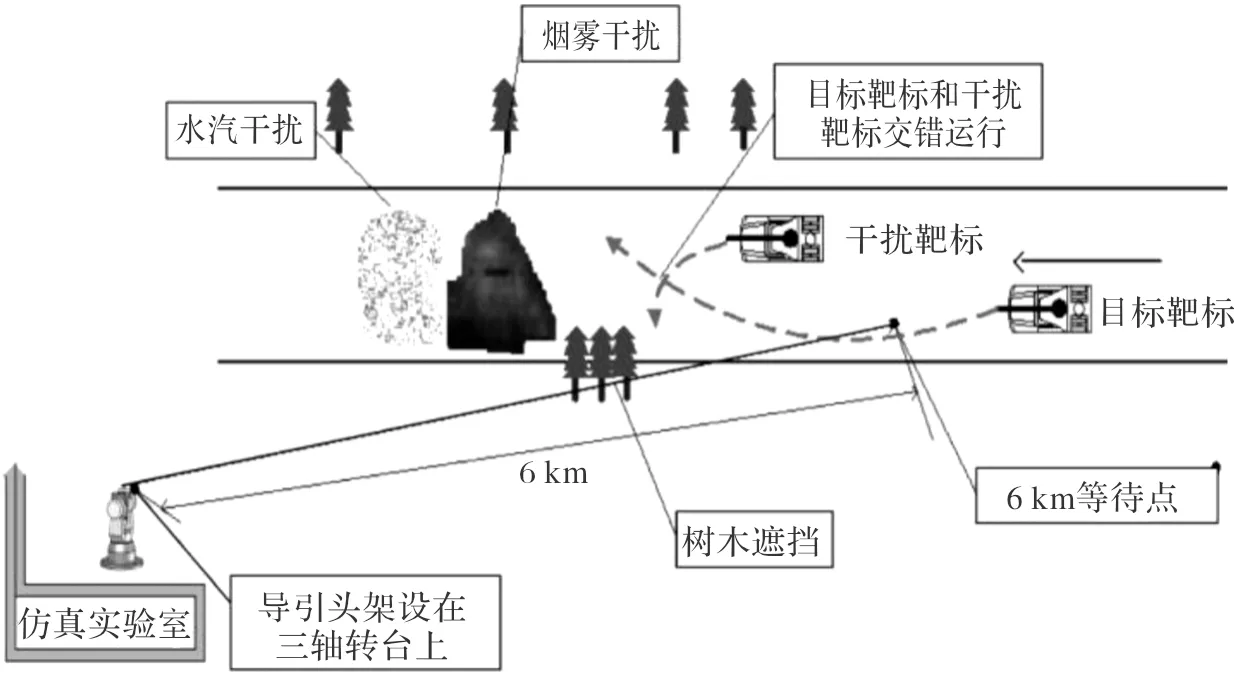
图1 外场导引头开环试验Fig.1 Open-loop test of seekers in outfield
2) 导引头闭环跟踪试验
为了探索一种简便经济的闭环制导模拟方法,国内采用导引头搭载飞艇的方法进行制导模拟[2]。不同于导引头挂飞试验,该方法利用导引头测量得到的目标信息,实时控制飞艇向目标做制导飞行(见图2)。显然,这种由导引头引导做制导飞行的飞艇,可以作为干扰对象来检验电子干扰对闭环制导控制过程的干扰效果。
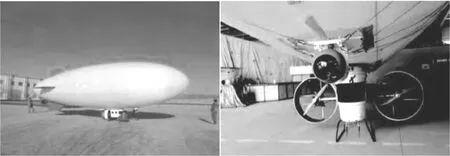
图2 导引头安装在无人飞艇上Fig.2 Seeker mounted on unmanned airship
3) 多导引头动态试验与环境特征测量
在美国白沙靶场,光电数据获取与跟踪系统是在真实环境试验中采用真实的目标和对抗措施来研究导引头对环境的反应能力[11-13]。它能够同时支撑六枚导引头同时进行试验,事后分析导引头对不同环境的适应性。同时,该系统配备了红外至紫外波段的光谱分析仪、辐射计和成像仪以获取目标、对抗措施和背景的信号特征。
在作战试验中,为了实现接近战场条件的复杂试验环境,一般通过营造烟雾、火光、复杂电磁、自然环境、地形等环境实现接近战场条件,从而准确考核武器装备的战术技术性能和环境适用性。在以上研究的基础上,针对现有方法的不足,论文提出了一种导引头面向真实大气环境、干扰和目标特性试验和数据获取的可视化方法,在接近真实复杂战场环境条件下,构建了制导武器系统的可视化动态测试平台同步伴随导引头跟踪记录,获取导引头探测、识别和跟踪目标过程的同步、实时可视化信息并实现导引性能评估。这种方法在靶场环境下针对实际靶标目标进行静态、动态跟踪试验,可为室内仿真提供目标背景的直接驱动数据,提升仿真逼真度,同时,也可多次重复考核导引环节的关键能力,弥补实弹射击试验数量的不足,为武器系统研制过程提供了一种全新的测试验证手段。
1 导引头可视化数据获取方法
基于外场实际测试环境的导引头性能可视化数据获取方法,是接近真实复杂战场环境下导引头性能的考核方法,为激光、毫米波、电视、红外等制导武器系统提供外场综合试验验证及动态挂载测试系统平台,对不同研制阶段、不同制导模式的导引头系统进行集成试验与测试评估,实现试验过程信号、图像采集和传输,通过视频图像和测试数据实现对制导导引系统性能参数的量化分析与评估。
对于毫米波、激光等测试过程中跟踪结果不可视的导引头,无法直接获取导引头跟踪性能参数,而通过空间弹目连线方法计算误差大。因此,采用加装可见光成像系统同步伴随导引头运动的方法,将导引头跟踪捕获过程可视化,能够获取导引头最大捕获距离、跟踪测量精度、抗干扰能力等参数。
1.1 导引头可视化试验方法
制导武器系统导引头性能可视化试验方法是将需要进行外场试验测试的导引系统与可视化评估系统通过机电接口集成后,采用固定或地面移动车载平台,将导引头安装在两轴转台上以模拟弹体飞行过程中的姿态运动,将两轴转台安装在地面移动平台上模拟弹体接近靶标过程,在两轴平台上加装可见光成像系统同步伴随导引头运动,将导引头跟踪捕获过程可视化。通过对导引头输出参数和可视系统图像进行分析,完成导引头运动过程性能数据的获取。该系统适应于激光制导武器、红外制导武器、毫米波制导武器、图像制导武器等不同机制类型的武器制导导引头性能的跟踪试验挂载与性能评估。
1.2 试验系统
可视化二维探测系统主要由导引头、电视成像分系统、伺服转台分系统、图像存储器、图像跟踪器、显示控制分系统、标定系统及辅助设备等部分组成,如图3所示。

图3 可视化系统组成Fig.3 Composition of visualization system
电视成像分系统作为可视化系统,直观显示导引头对目标的跟踪过程;转台分系统为电视成像分系统提供运动载体,根据导引头的指令伴随导引头运动;图像存储器用于存储视频图像,用于后续开展对导引头性能参数评估的依据;图像跟踪器用于提供视频图像中目标的脱靶量,为导引头性能评估提供有效数据;显示控制分系统主要提供人机交互界面、完成与各分系统通讯、图像信息显示等功能;电视成像分系统、图像跟踪器、图像存储器在结构设计时组成在一起,使用时固定在转台分系统的俯仰轴上,作为转台的负载,可完成方位和俯仰两个方向的运动;标定分系统完成可视系统和导引头的光轴-光轴-电轴一致性的标定;辅助设备主要包括电源变换器、设备的安装固定装置等。转台分系统和导引头通过固定装置固定在系统的安装装置上,它们与显示控制分系统通过电缆连接,实现数据交互[14]。系统结构布局如图4所示。
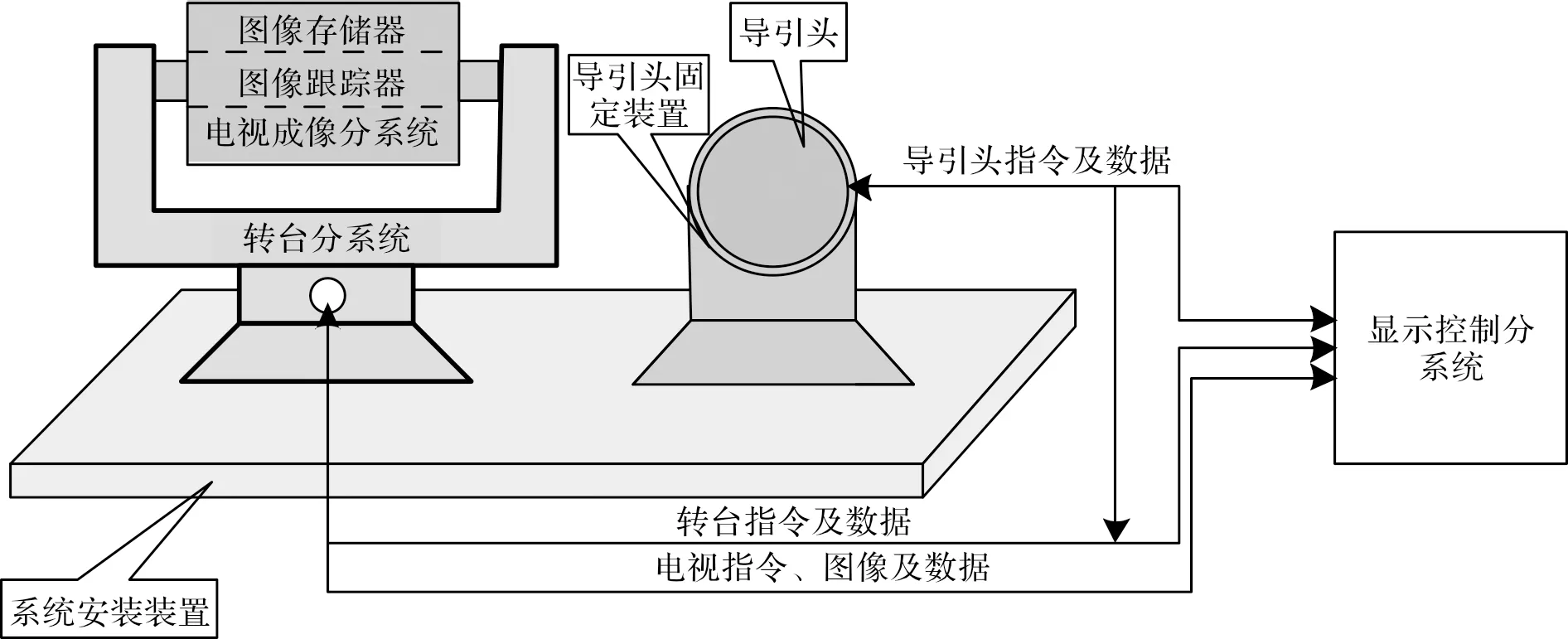
图4 系统结构布局Fig.4 Layout of system structure
1.3 可视系统同步随动技术
为保证可视系统能精确反映导引头跟踪情况,需保证可视系统光轴与导引头跟踪轴严格同步。这里主要解决两个主要关键技术:一是多轴平行度标定技术,解决可见系统光轴分别同激光导引视轴、毫米波导引轴等的平行度问题;二是提高随动控制精度实现两轴同步伴随运动,可视系统为了能准确反映导引头探测、识别和跟踪过程,需要将成像系统同步随动于导引头。在试验过程中,利用导引头输出的框架角信号使成像系统随动于导引头,直观显示制导导引系统搜索区域、截获目标和跟踪过程。
2 典型试验场景设定
2.1 作战过程设计
根据导引头制导方式和导弹用途,在不同的试验环境进行,包括导引头姿态、运动速度、运动路线、靶标特性、靶标运动特性、靶标背景设置、干扰目标设置、地形地貌等。通过对试验场景总结分类形成战例库,并根据考核难易程度实现试验场景的量化分级。
2.2 导引头运动模型建立
根据不同的试验场景建立相应的弹目相对运动模型,包括导引头俯仰角、方位角、挂载平台运行速度、路线、靶标运动特性等。图5为根据不同的目标与环境,设计导引头的模拟动作。
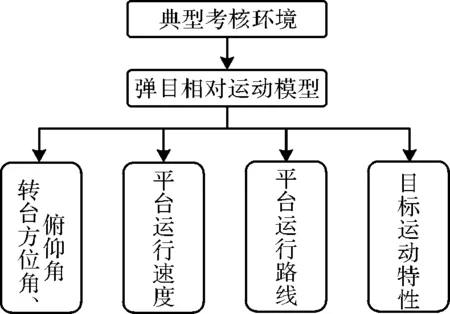
图5 模拟导引头的动作Fig.5 Simulation of seeker action
2.3 干扰方案设计
根据不同的试验场景设置相应的模拟干扰目标,包括干扰目标数量、位置、干扰方法等[15]。图6为激光导引头抗激光角度欺骗干扰外场模拟试验布局示意图。
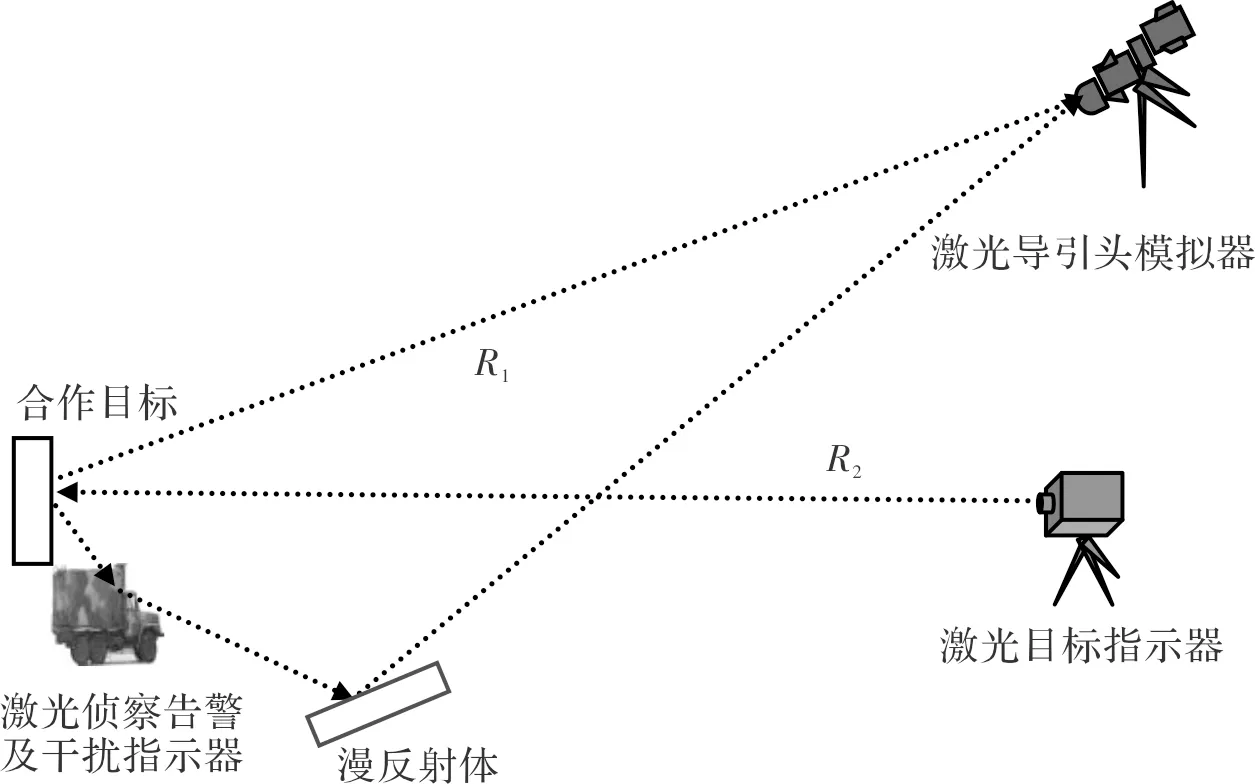
图6 激光导引头抗激光角度欺骗干扰模拟试验示意图Fig.6 Simulation experiment of laser seeker against laser angle deception jamming
激光导引头抗激光角度欺骗干扰外场试验方法是在野外试验场地上放置激光告警侦察系统、干扰激光指示器、漫反射板假目标和导引头合作目标(漫反射板真目标),在远距离处放置激光目标指示器和激光导引头,确保干扰信号和指示信号能同时进入导引头视场。
通过发射激光指示信号和干扰激光信号作用于激光导引头,促使激光导引头工作于闭环状态,以实现目标的跟踪闭环控制模拟,模拟被保护目标和假目标被激光导引头跟踪的视线角(框架角)的变化状态,通过激光导引头跟踪视线角的变化情况来检验激光导引头的抗干扰效果。图7为导引头外场可视化模拟干扰试验数据获取现场。

图7 导引头外场可视化模拟干扰试验数据获取现场Fig.7 Field data acquisition of jamming simulation test for seeker visualization
3 数据获取方法
系统工作时,显示控制分系统为被试导引头下达控制指令,使导引头工作,并接收导引头发送的数据信息、状态信息等反馈数据。同时,转台分系统接收被试导引头分系统输出的目标视线角偏差、导引头工作状态等数据信息,转台在该信息的控制下进行随动,电视成像分系统完成被试导引头分系统搜索跟踪区域的视场图像的处理,视频图像在显示控制分系统上显示。通过显示控制分系统实现对图像跟踪器和图像存储器的控制,实现对目标的捕获跟踪,输出目标脱靶量信号,如图8所示,并可实现对视频图像的存储。
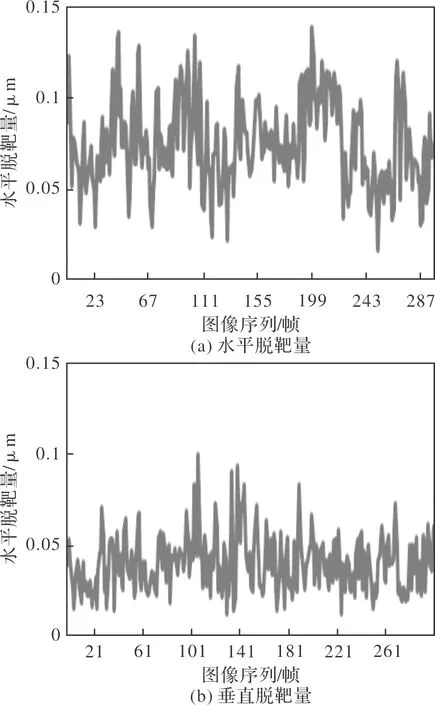
图8 动平台静目标跟踪过程脱靶量Fig.8 Miss distance of static target tracking on moving platform
视频处理信息流程:电视成像分系统的视频图像首先输出至图像跟踪器,跟踪器根据工作指令决定是否对目标自动跟踪并输出视频图像至图像存储器,图像存储器可同时完成视频存储和图像输出,在显示控制分系统实现图像显示。系统工作原理如图9所示。
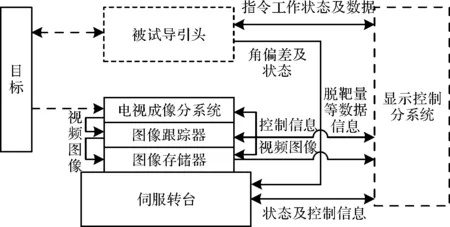
图9 成像分系统工作原理Fig.9 Working principle of imaging subsystems
以记录的可视化图像及导引头输出信号为依托,导引头跟踪性能评估可以从定性及定量两个方面来考核。其中定性考核可以从可视化图像的稳定性及跟踪情况上直观反映;定量考核则包括了多项考核指标,包括静态、动态跟踪精度以及多目标或干扰情况下的跟踪性能考核。通过对时空信息和脱靶量的测量分析,可以给出导引头的一些性能参数,这些参数如图10所示,图11为可视系统记录的激光导引头跟踪目标和干扰目标的过程,图12是试验获取的导引头闭锁/开启状态转换期间获取的导引头和随动可见光系统状态信息。
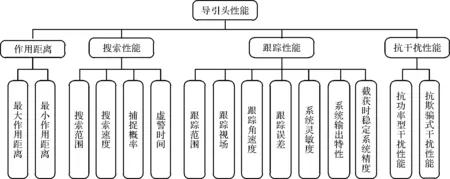
图10 测量的导引头参数Fig.10 Seeker parameters being measured

图11 可视系统记录的激光导引头跟踪目标和干扰目标试验Fig.11 Tests of laser seeker tracking and jamming recorded by visual system
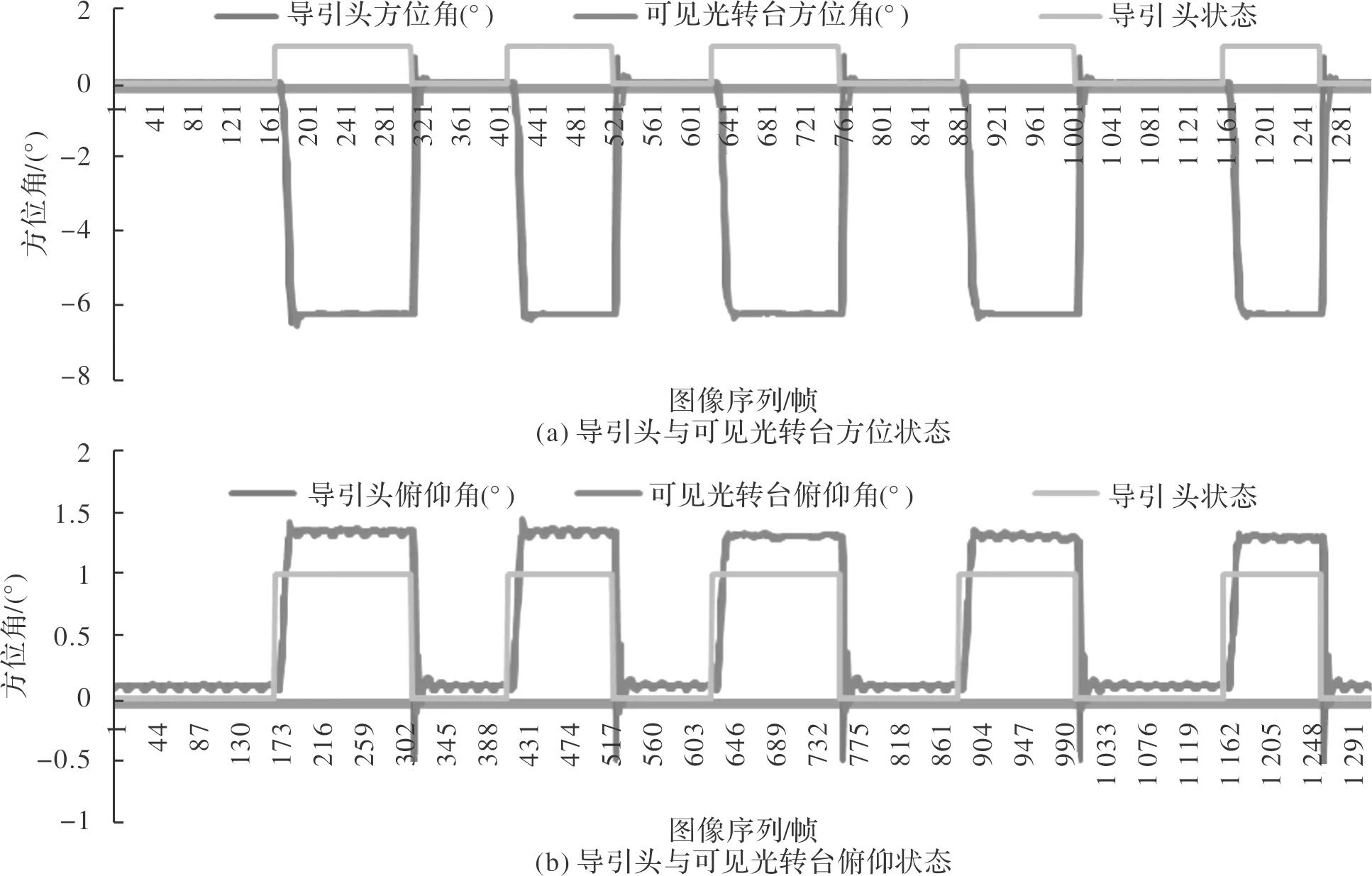
图12 导引头闭锁/开启状态转换期间获取的导引头和随动可见光系统状态(彩图见电子版)Fig.12 Acquired states of seeker and servo visible system during lock/open states(coloar online)
此外,该系统平台获取的时空信息、环境和干扰的量化描述会更准确地对制导兵器的性能进行评估。设计与导引头视场相匹配的可视化系统,就可以通过视频记录的干扰时空位置,通过计算得到导引头视场内干扰、特殊背景等事件发生的时间、位置以及大小等信息,事后分析各类环境下导引头的性能参数。同时,可以在平台上再配备红外至紫外波段的光谱分析仪、辐射计和成像仪等其他目标特性探测系统以同步获取目标、对抗措施和背景等信号特征。
4 结论
导引头可视化试验方法是介于室内半实物仿真试验和外场实弹飞行试验之间的一种试验方法。相对于室内半实物仿真试验,外场可视化试验为导引头提供了真实的目标及背景环境,并可以方便地布设各种干扰靶标和干扰物,试验结果置信度更高。相对于外场飞行试验,可视化试验更具针对性,被试件可以无损回收并进行多次重复试验。除此还具有以下几个方面的优势:
1) 该方法适合各种制式导引头;
2) 能够实现时空信息的与目标特性的测量;
3) 实装试验结果与仿真分析预测的对比验证,可以实现体系贡献率评估的量化外推与结论闭环;对外场实装试验原始数据进行采集和处理后,可以运用数据分类与聚类等分析技术,定量检测实装试验与仿真试验结果的一致性,进一步确认仿真的有效性和正确性,并得出在不同作战环境下,装备技术参数、战术性能和体系作战效能的一致量化结论;
4) 竞标试验的优势;
该方法可以多个导引头同时试验,这样在竞标试验时,可以在相同的时间地点环境中同时考核导引头的性能,排除环境信息的不同而产生的非议。
猜你喜欢
世界科学技术-中医药现代化(2022年3期)2022-08-22
师道·教研(2022年1期)2022-03-12
海洋信息技术与应用(2020年1期)2020-06-11
中国交通信息化(2019年5期)2019-08-30
传媒评论(2019年4期)2019-07-13
中国交通信息化(2017年1期)2017-06-08
中国交通信息化(2017年4期)2017-06-06
中国交通信息化(2017年10期)2017-01-14
制导与引信(2016年3期)2016-03-20
火控雷达技术(2016年1期)2016-02-06