
基于近场声全息的目标反射声场重建方法研究
2019-12-14 01:12陈新宁
中国测试 2019年11期
陈新宁
(1.91388 部队,广东 湛江 524022;2.水声对抗技术重点实验室,广东 湛江 524022)
0 引 言
使用声纳设备可以对潜艇、水面舰艇、水雷、鱼雷等水下目标进行探测[1-2]。为了提高航行器的声隐身性能,需要对潜艇等航行器壳体表面的声波反射情况进行分析[3-5],从而进行外形改造或特殊处理来降低反射声波强度。
对目标反射强度的测量一直是采用水听器直接进行的,但是目标与水听器距离过小时,水听器本身会成为一个反射体,影响声场的测量精度。禹建[6]运用Matlab软件对潜艇、鱼雷和水雷这3种常见水下目标的回声信号进行了模拟与仿真,对获得的不同水下目标的回声信号的相关特性进行了研究;杨鹏等[7]根据Kirchohoff近似公式建立了一种水下目标回波亮点特性计算的新方法,将回波亮点特性中的面元计算转化为对图形像素点相关信息的计算,对不同传播距离的面元反射特性求和得到水下复杂目标回波亮点特征;谭昕等[8]分析了不同外形水雷的目标强度与隐身之间的关系,并对一些典型外形进行了目标强度计算。以上论述虽然都可得到水下目标的反射声波特性,却无法得到水下目标表面的反射声常情况。近场声全息技术[9](NAH)是上世纪80年代由传统声全息技术演变而来的一种非常有效的声场推算及声场可视化技术,为获得航行器壳体表面反射声场提供了技术手段。1980年,Williams等[10]正式提出了基于空间Fourier变换的近场声全息理论。国内对近场声全息的研究,大多是以基于空间Fourier变换的方法为主;崔志光等[11]利用近场声全息技术进行声呐目标强度测量,但只测量几个点进行亮点重建,误差较大;丰少伟等[12]利用近场声全息技术研究了实艇测试中存在的海底声反射问题,得到海底吸声量与测试精度的关系,验证了近场声全息技术在应对声场反射问题的有效性。
本文在空间声场变换算法(STSF)的基础上,以一个胶囊状仿潜艇模型为实验对象,对其表面反射声场进行反向重构仿真分析,并在 5 m×3 m×3.5 m的消声水池内进行实验验证,最后根据误差分析结果验证近场声全息技术重构水下航行器表面反射声场的可行性和有效性。
1 基本理论
均匀理想流体介质中的小振幅声波的波动方程为

式中:∇2——Laplace算子;
p(r,t)——声场中任意一点处r的声压;
c——声波传播的速度。
对波动方程进行Fourier变换,得到不依赖于时间变量的Helmholtz方程:

其中,k=ω/c,为波数; ω =2πf,为角频率。
定义全息面(测量面)用H表示,重构面(源面)用S表示。
在Dirichlet边界条件下,对于zH>zS的空间为自由场的情况,式(2)的解为
gD为Dirichlet边界条件下无穷大平面的Green函数:
式中:

对式(4)两边取空间Fourier变换,将空域卷积化为波数域中角谱的乘积:

其中,P(kx,ky,zH)为声压p(xH,yH,zH)的空间Fourier变换;PD(kx,ky,zS为边)界条件pD(xS,yS,zS)的Fourier变换;GDkx,ky,zH-zS为Green函数的空间Fourier变换,解析表达式为

同样可得反向重构公式:

由式(7)可得重构面声压:

声场重建公式(7)的推导过程中没有近似,故其结论是严格的,本身不存在误差。但在实际计算中,由于测量孔径有限,会引起卷绕误差[13];由于全息数据边缘的不连续会引起边缘误差;同时测量环境中的噪声以及测量仪器本身的误差都会造成全息面质点振速测量结果的不准确。这些数据中所包含的误差成分会被 e-kz(zH-zS)按指数所放大,尤其是对于高波数区域,即当波数分量很大时,测量值的误差对结果的影响非常严重,甚至会造成重建结果失真。
以重建误差[14]作为指标,来评价重建效果,本文所用重建误差的计算公式与文献[14]一致,计算公式为
式中:pt——重建面理论声压值;
ps——重建面计算声压值。
本节推算了二维平面声压的构建方法和近场声全息基本理论,作为本文声场推算方法的计算依据。
2 仿真验证
仿真测量示意图如图1所示,在直角坐标系中,胶囊状仿潜艇模型的中心位于坐标原点,模型为空心壳体,模型长度L=19 cm,半径r=3 cm。发射换能器发射频率为30 kHz的正弦脉冲信号,声波经胶囊状仿潜艇模型反射后,使用多物理场仿真软件comsol分别仿真计算重构面及测量面的反射声场分布。仿真计算时,将有限大小的测量面离散成500×500个采样点,x和y方向的采样点间距都设为0.2 cm,重构面与测量面平行,面积大小与测量面相等。水中声速设为 1 480 m/s,密度为 1 000 kg/m3,测量面距离模型中心为20 cm,重构面距离模型中心 15 cm。
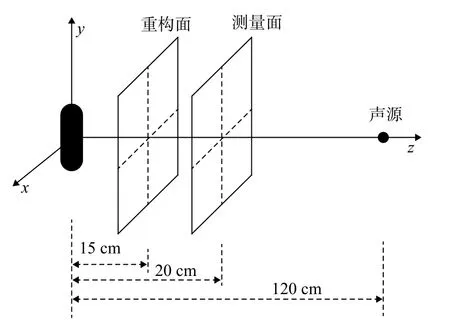
图1 反射声场测量仿真模型
为了更直观地观察声场起伏状态,只给出声压分布沿x轴和y轴的剖面图进行分析。仿真计算出的重构面声压分布,作为真实值与推算值进行对比,如图2所示,图2(a)为重构面上的x方向上的声压分布,图2(b)为重构面上的y方向上的声压分布。
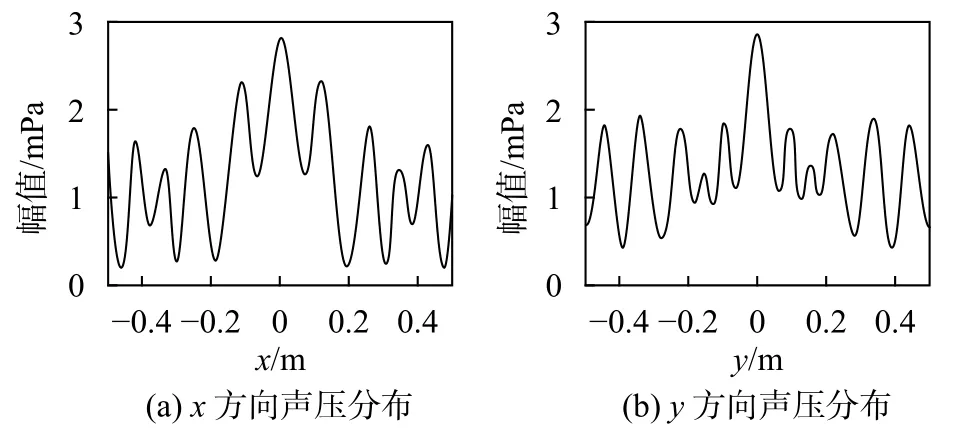
图2 重构面理论声压分布仿真计算结果
由图可知,由胶囊状反射体表面反射的声场是不规则的,引起反射的部位不仅仅是柱体圆柱表面,两端的反射也是存在的,并且是不规则的,同时胶囊反射体中间的反射强度最大。所以当利用水听器贴近反射体表面进行发射声场测量时,水听器本身也会引起反射,造成被测声场的混乱,形成较大的测量误差。
同时,仿真计算出测量面的声压分布后,利用NAH技术,依据式(7)由测量面声压分布反向推算出重构面声压分布,推算结果如图3所示,图3(a)为重构面上的x方向上的声压分布,图3(b)为重构面上的y方向上的声压分布。
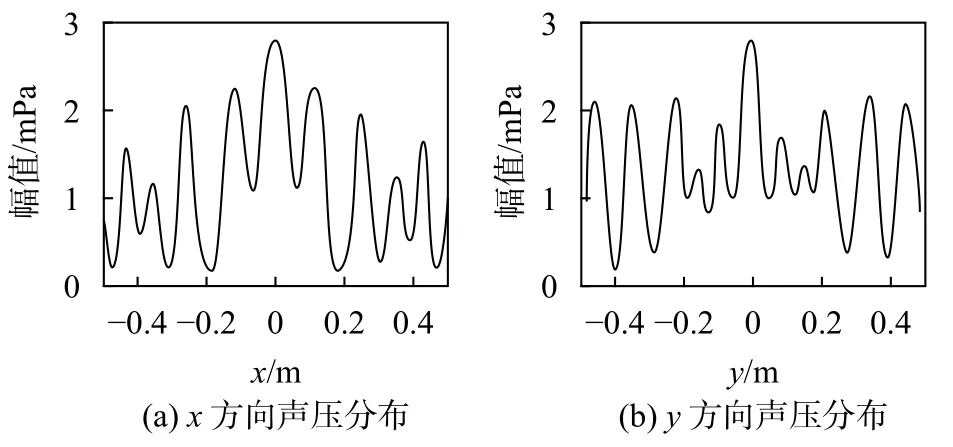
图3 重构面推算声压分布结果
由重构面仿真结果及推算结果进行对比可知,利用近场声全息技术推算出的反射体表面的反射声场曲线与理论反射声场曲线基本一致,对推算结果进行定量分析,根据式(9)可得误差为8.64%。因此,基于空间傅里叶变换的近场声全息技术的声场推算方法可以有效得到重构面上的声压分布。因此,将近场声全息技术应用于识别水下目标壳体表面的反射声场信息,为水下航行器壳体的外形设计或材料选取提供了一种检测的新思路。
3 近场声全息实验研究
实验在一个 5 m×3 m×3.5 m 的消声水池中进行,利用填充脉冲信号作为发射信号源,以便在空间上隔开直达信号、反射信号以及样品边缘衍射的特性,以降低测量低频限,获得可靠的测量结果。
测量系统如图4所示,主要包括信号源、功率放大器、高精度三维控制机构、球形水听器、前置放大器、数字示波器、计算机等。小球换能器、水听器、胶囊状壳体按照仿真位置放置,此时直达波与反射波声程差最小为30 cm,因此信号源发射频率为30 kHz时,波长为5 cm,为了隔开直达信号与反射信号,脉冲循环数应小于6个。实验中信号源发射频率为30 kHz,脉冲数为4个的填充脉冲信号,经过功率放大器放大后激励小球换能器发射声波。水听器安装在控制机构上,控制机构最小步进距离为0.02 mm,球形水听器接收的信号经过前置放大器后,再由数字示波器进行采集和显示。为了获得不同测量点复声压,通过计算机控制步进机构、使水听器完成对一点声场扫描后,运动至下一扫描点,直至完成所有测量点的扫描;通过对数字示波器在每个测量点采集的信号进行读取,得到测量平面的声压值。
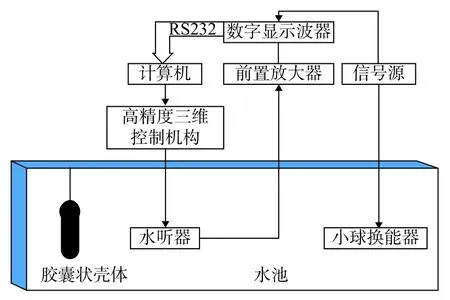
图4 声场测量系统示意图
实验选用胶囊状仿潜艇模型,并按仿真所设定的参数进行测量与声场重构。测量面x和y方向的采样点间距都为0.5 cm,沿着测量面内x和y轴测得的点数分别为200和200,重构面与测量面平行,面积大小与测量面相等。
为了验证重构算法的正确性,使用水听器直接测量重构面的声场分布,图5所示的是重构面x方向轴线声压和y方向轴线实测声压分布。
同时,在得到测量面上的声压分布后,依据公式(7)推算得到重构面声场信息,如图6所示为推算得到的重构面x方向轴线声压和y方向轴线声压。
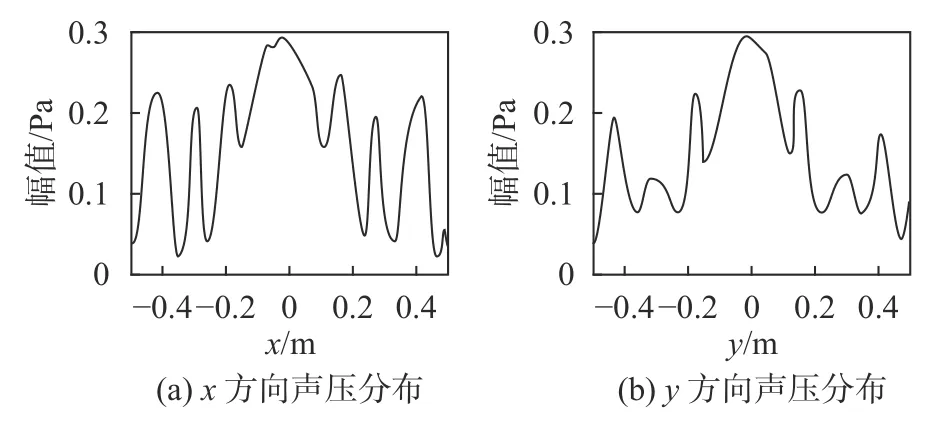
图5 重构面实测声压分布
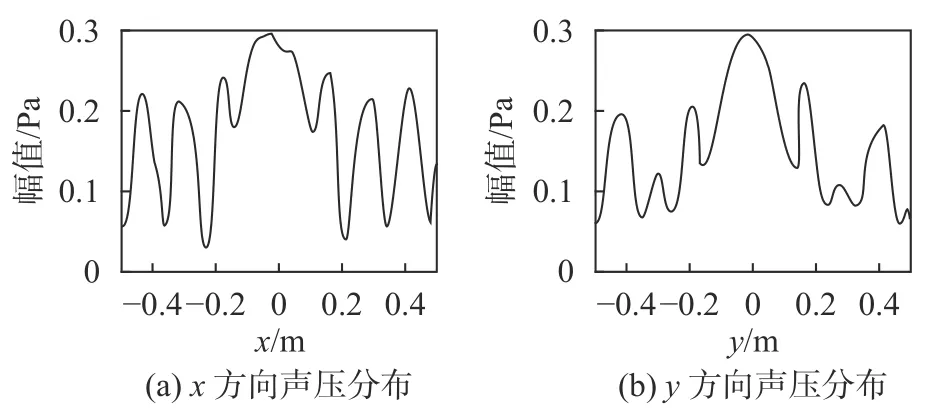
图6 重构面推算声压分布
通过图5和图6比较可知,推算结果与实验结果趋势大致一样,根据式(9)可得实验误差为9.48%,与仿真结果基本一致。分析其误差来源,主要有4点:
1)悬挂的胶囊状壳体倾斜,从而引起推算误差。
2)在近场数据采集过程中,由于环境噪声和电干扰的影响等引起的测量误差会影响结果的准确性。
3)由于测量的点数是有限的,测量面不可能包含所有的声场信息,会引起信息的泄露,造成有限孔径误差。
4)快速傅里叶变换虽然加快了数据计算速度,但也带入了卷绕误差。
4 结束语
本文通过对胶囊状壳体表面的的辐射声场进行测量。以空间傅里叶变换的近场声全息技术作为理论基础,提供了一种测得潜艇等水下航行器表面反射声场信息的新思路。通过对仿潜艇模型壳体的声场的推算结果,从理论推算和实验测量两个方面验证了推算方法,证明该测量方法可应用于检测水下航行器表面声波的反射情况,对分析潜艇等水下航行器的声隐身性能提供了一种技术手段。
猜你喜欢
压电与声光(2022年3期)2022-07-16
机械设计与制造(2022年4期)2022-04-28
电声技术(2022年3期)2022-04-28
合肥工业大学学报(自然科学版)(2020年11期)2020-12-05
科学技术创新(2020年19期)2020-07-03
海洋信息技术与应用(2020年1期)2020-06-11
铁道通信信号(2020年12期)2020-03-29
汽车工程(2018年12期)2019-01-29
家庭影院技术(2018年11期)2019-01-21
家庭影院技术(2018年10期)2018-11-02
