
基于LTE-V的车载V2X系统研究
2019-12-27 04:13杨波张莹蔡之骏冯其高张志德
移动通信 2019年11期
关键词:硬件
杨波 张莹 蔡之骏 冯其高 张志德
摘要:随着汽车保有量快速增长,交通问题愈发严重,车联网在智能交通领域作用越来越重要。立足于车联网的定义和车载系统架构,着重介绍基于LTE-V的车载V2X系统设计关键技术和应用,包括VBOX硬件设计和软件设计,最后对V2X系统进行了实车验证,实验证明,当远车没有变道情况下预警准确率可达到100%,当远车存在不确定性变道的情况下,准确率能达到90%以上。
关键词:V2X;VBOX;硬件;软件架构
doi:10.3969/j.issn.1006-1010.2019.11.012 中图分类号:TN929.5
文献标志码:A 文章编号:1006-1010(2019)11-0075-06
引用格式:杨波,张莹,蔡之骏,等. 基于LTE-V的车载V2X系统研究[J]. 移动通信, 2019,43(11): 75-80.
Research on the Vehicle V2X System Based on LTE-V
YANG Bo, ZHANG Ying, CAI Zhijun, FENG Qigao, ZHANG Zhide
(GAC Automotive Research & Development Center, Guangzhou 510000, China)
[Abstract] With the rapid growth of car ownership and traffic problems, the role of Internet of vehicles (IoV) in the intelligent transportation is becoming increasingly important. Based on the definition of IoV and the vehicle system architecture, this paper focuses on the key technologies and applications of the V2X system design based on LTE-V, including the hardware and software design of VBOX. Finally, the experiments reveal that the system is stable to achieve the desired requirements. When the remote vehicle (RV) has not changed the lane, the warning accuracy reaches 100%, and when the RV intends to change the lane with uncertainty, the accuracy reaches more than 90%.
[Key words]V2X; VBOX; hardware; software architecture
0 引言
隨着汽车数量飞速增长,交通安全事故急剧上升,道路拥堵等问题愈发严重,车联网技术逐渐成为行业研究热点,通过车联网实现车路人互联,可以显著提高行车安全,优化交通状况,减少汽车能耗[1]。
车联网功能等级可以分为四个阶段,第一阶段为网联辅助信息交互,基于车—路、车—云通信,实现导航、道路状态、交通信号灯等辅助信息的获取以及车辆行驶与自车驾驶员操作等数据的上传。第二阶段为网联协同感知,基于车—车、车—路、车—人、车—云通信,实时获取车辆周边交通环境信息及周边各交通参与者和路侧/云端的感知信息,与自车传感器的感知信息融合,作为自车决策系统的输入。第三阶段为网联协同决策,基于车—车、车—路、车—人、车—云通信,实时并可靠获取车辆周边交通环境信息及周边各交通参与者和路侧/云端的决策信息,与自车传感器的感知信息融合,作为自车决策和控制系统的输入。第四阶段为车路云一体化协同控制,基于车—路、车—云通信,结合交通参与者、路侧感知信息,路端/云端进行全局优化调度与控制,实现交通安全与效率最大化[2]。
当前,正处于网联辅助信息交互阶段,国家相关网络、标准和法规在逐步建立中[3],国内外芯片制造商也已在研制满足车联网标准的LTE-V通讯芯片,已经有相应的模组或产品推出,可用于前期技术研究和演示,本文基于LTE-V通讯技术设计了一款车载V2X系统。
1 V2X车载系统设计
V2X车载系统主要由VBOX(V2X控制器)、天线、安全警示系统以及连接线束组成,其中天线包含4G天线、LTE-V天线和GNSS天线,安全警示系统集成在IVI(车载信息娱乐系统)中进行展示,并向驾驶员提供预警信息。
1.1 VBOX系统设计
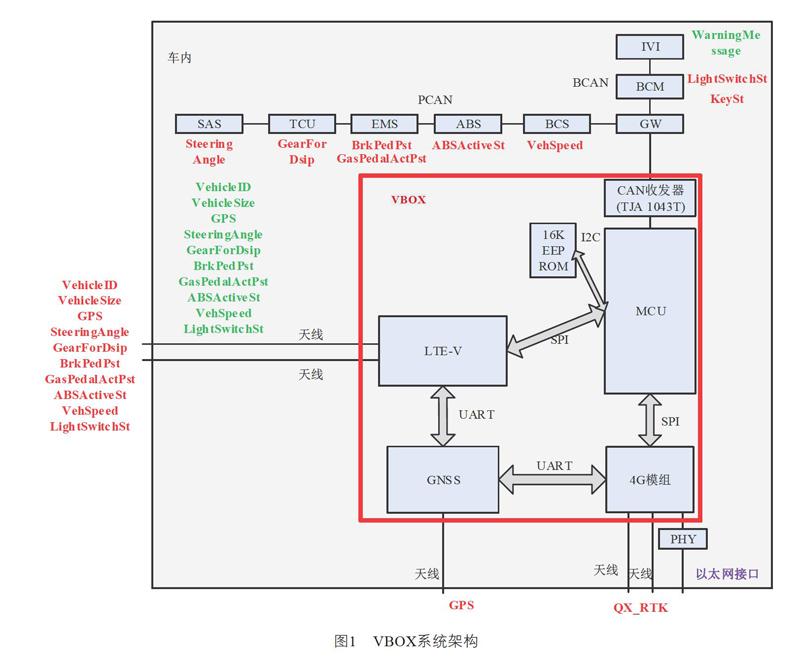
VBOX的系统架构方案如图1所示,主要由LTE-V模组、MCU、4G模组和高精定位模组组成,并且预留HSM承担V2X信息安全的加解密。
(1)VBOX核心包括LTE-V通讯模组、4G模组、高精度定位模组和MCU。
(2)VBOX通过ACAN、BCAN和PCAN与车内网连接,在车内获取SAS(方向盘角度传感器)、GSM(换挡杆模块)、EMS(发动机管理系统)、BCS(制动控制系统)、BCM(车身控制器)等节点的相关信号。
(3)MCU将总线上获取的车速信号并通过SPI发送至4G模组,将轮速信号通过硬线发送至GNSS模组。
(4)通过4G模组上网获取RTK信号、车速信号发送至高精定位模组计算高精度定位信号。
(5)通过LTE-V模组获取其他车辆信号、并周期性地广播本车信号。
(6)LTE-V模组接收GNSS的GPS信号、MCU的车内信号,通过应用算法计算出预警信息并通过SPI发送至MCU,MCU将预警信息通过CAN总线发送至IVI显示。
1.2 天线匹配
天线用于实现V2X信号、GNSS信号、4G信号的接收和发射,基本功能如下:
(1)接收空间中的电磁波信号,将其转换为高频电流信号并传输到接收机上。
(2)将高频电流信号转变为空间传波的电磁波信号。
其中LTE-V天线指标如表1所示:
将所有天线集成在鲨鱼鳍内,并放置于车顶,可以提高天线的接收和发射性能,如图2所示为与VBOX配合的鲨鱼鳍天线:
1.3 布置位置
从鲨鱼鳍天线到VBOX的连接线缆应尽量选用车规级高性能线缆,选取3组3.5 m长的RG58LL线缆对不同频段的信号进行衰减测试,结果如表2所示,对高频段信号平均每米衰减1.07 dB。
所以VBOX的布置位置应尽量靠近鲨鱼鳍,如图3所示,将VBOX布置在车顶钣金下方,可将鲨鱼鳍与VBOX之间的线缆降低至20 cm以内,提高信号强度。
2 VBOX软件设计
VBOX的软件包括三部分,分别位于MCU、LTE-V模组和4G模组内,MCU负责VBOX的电源管理、CAN协议栈等,4G模组负责VBOX的上网功能,而V2X的核心功能均布置于LTE-V模组内。
2.1 LTE-V模组软件架构
LTE-V模组内的软件可分为八部分,如图4所示。
(1)LTE-V模组的SDK:包括Bootloader、Linux Kernel、PDCP、RLC、GNSS Driver、PPS Driver等6个模块,其中Bootloader为AP的刷新提供支持,Linux Kernel包含SPI、UART等硬件驱动,PDCP和RLC为标准中定义网络层二层协议栈,GNSS Driver调用UART驱动使用NEMA协议接口,PPS Driver实现PC5模组与高精度定位模组之间的时间同步。
(2)Network Stack:符合标准的网络层协议栈,包括DSMP、MLME&PLME、Network API。其中DMSP为标准网络层报文协议。MLME&PLME为网络层管理实体,对网络层进行内部管理,一些管理可配置,由DME进行配置服务。Network API为网络协议栈的数据流(Data Plane)API接口。
(3)V2X Communication:该部分为V2X通讯层,主要包括Message Parser/Encoding,用于消息集ASN.1格式的编码/解码/解析/封装。
(4)V2X Applcation Support:包括V2V Service、V2I Service、V2P Service等3个模块,分别负责V2V、V2I、V2P3种服务,处理服务逻辑。
(5)Vehicle Position Handle:该部分包括GPS Daemon和PPS Services两个模块,用于处理车辆位置信号。GPS Daemon抽象和提供GNSS位置服务,对外提供高级定位服务API而不是低层的难于使用的NEMA协议接口。PPS Services提供OS内的时钟同步到GNSS时间。
(6)Vehicle Data Handle:该部分包括Vehicle Status Data、Caculate Data、Warning Data等3個模块,通过SPI协议栈与整车CAN总线数据进行交互。Vehicle Status Data为本车车辆状态数据,Caculate Data为V2X标定数据,Warning Data为计算后的预警数据。
(7)V2X Utility:提供基础编程环境,提供定时器、基础数据结构、日志等。
(8)Hazard Detect:危险检测部分,包括Target Classification、PH&PP、FCW、ICW、LTA、BSW、DNPW、EBW、HLW、SLW、AVW、CLW、RLVW、VRUCW、Threat Arbitrator等15个模块,其中Target Classification为目标分类(TC),负责将邻居车辆分为17个车道级相对位置。PH&PP负责计算历史路径和轨迹,危险仲裁(TA)负责场景危险计算。
2.2 前向碰撞预警
根据本车和远车的GPS数据计算两车之间的距离d,并与两车的碰撞距离DTC进行判断是否会发送碰撞事故。
rad(x)=x×π/180 (1)
(2)
(3)
其中X0和Y0为本车的经纬度值,X1和Y1为远车的经纬度值,V0为本车的车速,V1为远车的车速,T为驾驶员反应时间,t1为制动协调时间,t2为减速度增长时间,d0为静止时安全距离。
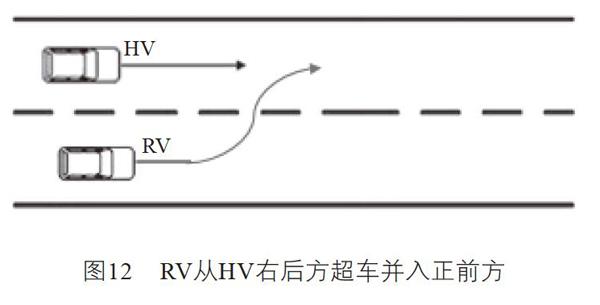
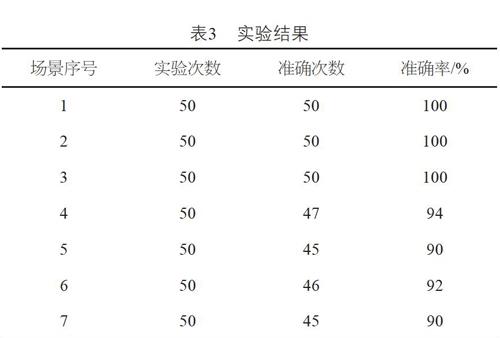
当d 前向碰撞预警流程如图5所示。 3 实验验证 为了验证该系统的稳定性及预警准确率,在某车型上搭载本文设计的V2X系统后,在特定园区内分别进行了7种不同场景各50次重复实验验证。 (1)RV在HV的左前方,如图6所示: (2)RV在HV正前方,如图7所示: (3)RV在HV的右前方,如图8所示: (4)RV在HV的左前方,且RV通过方向盘,即将并入HV正前方,如图9所示: (5)RV在HV的右前方,且RV转动方向盘,即将并入HV正前方,如图10所示: (6)RV从HV的左侧方超车,且RV通过方向盘,将并入HV正前方,如图11所示: (7)RV从HV的右侧方超车,且RV通过方向盘,RV将并入HV正前方,如图12所示: 实验结果如表3所示,当远车没有变道情况下预警准确率可达到100%,当远车存在不确定性变道的情况下,准确率能达到90%以上。 4 结束语 本文对LTE-V的车载系统进行研究,最后在实车上进行搭载验证前向碰撞预警,但仍缺少在弯道场景下的应用验证。未来将进一步进行V2X算法探索,利用5G的低时延和高可靠特性对搭载V2X系统的车辆实现自动驾驶控制。 参考文献: [1] 郝铁亮,叶平,郝成龙,等. 车联网技术研究[J]. 汽车实用技术, 2017(20): 141-143. [2] 吴海,肖子玉. 蜂窝车联网技术架构与关键技术研究[J]. 电信工程技术与标准化, 2018(6): 11-16. [3] 邹枫. 智能交通车路协同系统数据交互方式设计与验证[D]. 北京: 北京交通大学, 2014. ★
猜你喜欢
东方教育(2016年8期)2017-01-17
山东工业技术(2016年24期)2017-01-12
现代商贸工业(2016年22期)2016-12-27
科技创新与应用(2016年34期)2016-12-23
电脑知识与技术(2016年27期)2016-12-15
音乐爱好者(2016年11期)2016-12-02
科教导刊·电子版(2016年27期)2016-11-18
中小企业管理与科技·下旬刊(2016年11期)2016-11-18
中国新通信(2016年16期)2016-10-18
科教导刊·电子版(2016年18期)2016-07-18
