
地铁车辆制动特性及电空转换参数优化分析
2019-12-28 07:31王仁庆
城市轨道交通研究 2019年12期
王仁庆
(南京地铁建设有限责任公司,210017,南京//高级工程师)
地铁车辆在运营时普遍采用列车自动运行(ATO)模式,以降低司机的工作强度,保证列车高效运行[1]。车辆在ATO模式下运行时,ATO系统代替司机操纵列车牵引和制动,自动实现列车的启动加速、匀速运行及减速制动等基本驾驶功能[2],这些功能和过程均由信号系统实现和控制。信号系统实时采集车辆速度及到站距离,并输出对应大小的牵引力、制动力供给车辆的牵引系统和制动系统,同时对车辆进行闭环控制,使车辆能按照预先设定的速度曲线行驶。对于减速制动而言,因为牵引系统电制动响应快且跟随性较好,而空气制动系统响应慢且跟随性较差,所以空气制动系统作为被控制对象,只有首先对系统自身进行充分优化,尽可能提高系统特性的稳定性,才能有利于信号系统进行控制策略的制定和控制参数的调整,从而实现高精度控车。信号系统对制动系统的要求主要有以下几方面:
1)制动力大小符合合同要求;
2)制动力的延迟时间和建立时间需稳定,并应达到合同要求;
3)电制动和空气制动的转换过程中,总制动力保持稳定发挥。
1 地铁车辆制动系统的基本特性
地铁车辆的制动系统普遍采用空气制动与电制动混合的形式。电制动由牵引系统提供,在接收到制动指令后,列车牵引电机从电动机状态转换为发电机状态,将机械能转换为电能输出并产生制动力[3]。空气制动是依靠压缩空气推动闸瓦,作用在制动盘或轮对上,并依靠机械摩擦产生制动力。无论是电制动还是空气制动,其基本的系统特性均主要包括制动力的大小、制动力的延迟时间和建立时间。
1.1 制动力的大小
在项目设计阶段,首先约定100%制动级位所对应的瞬时减速度a,如果整车的质量为M,则当制动级位为100%时,整车制动力F=M·a·100%。对于运营速度为80 km/h的车辆,制动减速度a一般取-1.12 m/s2。
1.2 制动力的延迟时间和建立时间
制动力的延迟时间t1即为从制动指令发出开始至列车达到目标减速度值的10%所需要的时间;制动力的建立时间t2即为从列车达到目标减速度值的10%开始至达到目标减速度值的90%所需要的时间[4]。对于最大常用制动的a定义为-1.12 m/s2,t1一般取值不大于0.4 s;考虑到冲击限制为0.75 m/s3,需将t2的取值调整为1.5 s左右。
2 电空制动转换过程及其调整方法
正常情况下,在高速区域优先使用电制动,空气制动并不参与,但是由于牵引电机特性限制,电制动并不能持续稳定发挥到车辆完全停止,所以在低速区域需要有一个电制动和空气制动的转换过程,此时电制动力开始退出,空气制动逐步代替电制动,在列车停止后,制动系统再自动对列车施加一个保持制动。制动过程如图1所示。
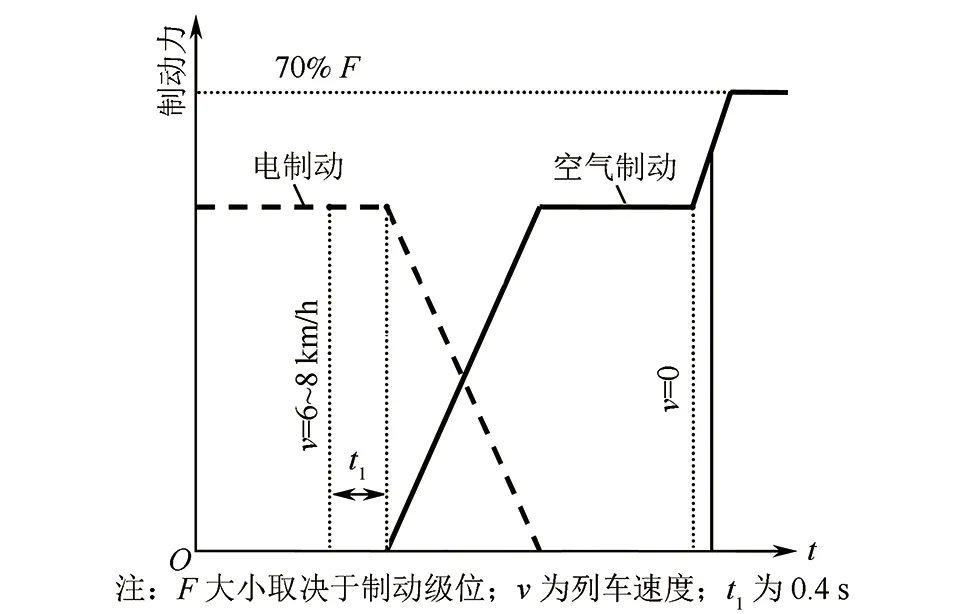
图1 电空制动的转换控制
由图1可知,当列车速度降低到6~8 km/h(具体数值根据车辆合同确定)时,TCMS(列车监控管理系统)发出电制动淡出信号传递给牵引系统和制动系统,电制动和空气制动分别按照约定的斜率(一般为1 m/s3)开始退出和施加,直到达到目标值。考虑到空气制动的响应时间比电制动长,因此牵引系统需要在接收到电制动淡出信号后延迟一段时间(一般为0.4 s),再让电制动按照约定斜率退出,以此与空气制动的施加动作协调一致。
上述仅是理论上的电空制动转换过程,但实际上还存在很多其他影响因素,如TCMS网络信号的传输延时、机械动作的不确定性、物理特性的变化、空气制动力上升过程的非线性等。直接使用约定参数并不能保证空气制动的施加与电制动的退出过程完全吻合,从而造成电空制动转换过程中瞬时减速度的不平滑[5]。
研究表明,影响ATO控车精度的车辆性能参数主要包括减速度可控最小步长、列车制动系统延时、保压制动施加及电空混合匹配等。而在列车拥有同样的制动管理系统及网络传输的条件下,减速度可控最小步长、制动系统延时及保压制动施加参数可认为一致,唯一不同的则是电空混合匹配问题。而在电空混合匹配中,主要涉及电空转换速度点、电制动预退出至实际退出的延迟时间、电制动衰退曲线斜率[6]等3个控制参数。
因此,在调试阶段应不断调整优化影响电空混合匹配的主要控制参数,即电空转换速度点、电制动延迟退出时间、电制动退出斜率这3个参数,以使电空制动转换过程中总制动力始终保持稳定发挥。
另外,由于合成闸瓦的瞬时摩擦系数会随着车辆速度的降低而逐渐升高,因此低速区间的空气制动力往往要偏大一些,而电制动力在整个高低速区间都比较稳定,这样就会导致电空制动转换后的列车减速度要高于转换前。
要使得电空制动转换前后的列车减速度保持一致,必须要在制动软件中对电空制动转换后的空气制动力目标值进行部分削减,以修正由闸瓦摩擦系数变高而造成的制动力偏差。具体削减策略如图2所示。

图2 电空制动转换后空气制动力削减策略
3 南京地铁3号线制动特性测定及优化
南京地铁3号线列车采用6辆编组(4动+2拖)A型车,以及采用更快速响应的架控制动控制系统。在常用制动和快速制动过程中,采用电制动与空气制动混合制动方式。首先优先采用电制动,当电制动力不能满足制动需求时,由空气制动自动补足并优先使用拖车的空气制动力。当列车减速至较低速度时,将电制动转换为空气制动。空气制动需要通过踏面制动单元施加,这就受制于制动气缸充、放气以及踏面制动单元动作固有的机械延迟,导致制动响应时间具有延时性[7]。因此,为了实现ATO精确控车及降低闸瓦磨耗,要求电空转换速度点尽量低,并能实现平稳转换。
南京地铁3号线最高运营速度为80 km/h,最大常用制动减速度为1.12(1+5%)m/s2,制动延迟时间要求不大于0.4 s,对制动力的建立时间未作要求,但考虑到列车冲击限制为0.75 m/s3,制动力的建立时间应取1.5 s左右。
3.1 制动减速度和延迟时间、建立时间的测定
对南京地铁3号线制动系统进行测定,结果如图3所示。由图3可知,100%最大常用制动级位下a为-1.104 m/s2,t1为0.31 s,t2为1.45 s,这些数值均符合合同要求。
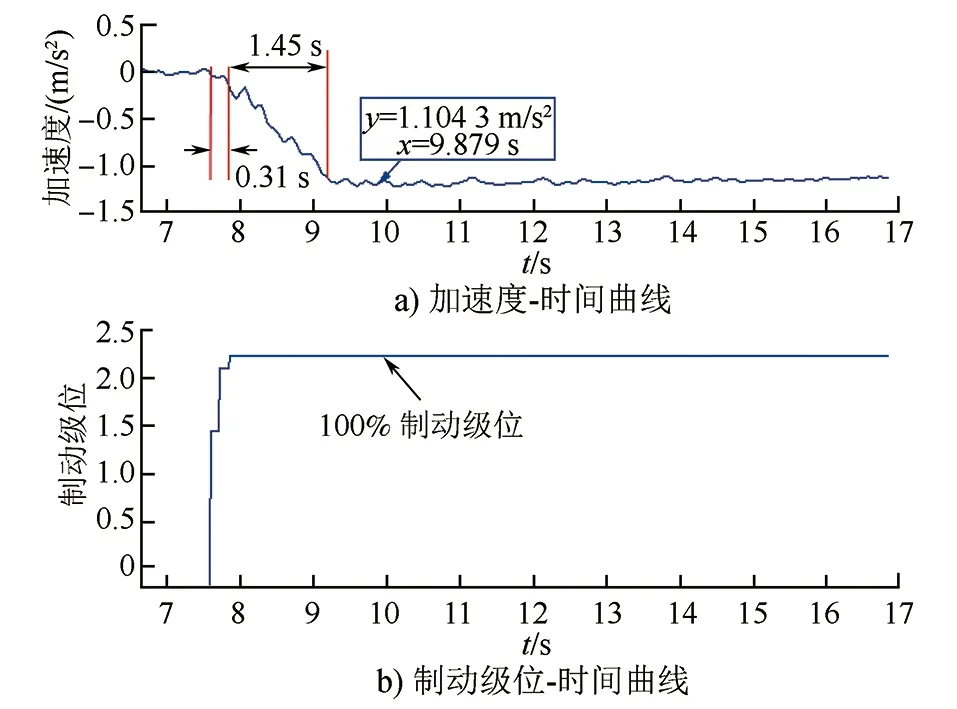
图3 南京地铁3号线制动系统特性测定结果
3.2 电空制动转换参数调整和优化
首先使用合同约定参数,将电空转换速度点设定为6 km/h,电制动延迟退出时间设定为0.4 s,电制动退出斜率设定为1 m/s3,在制动全程施加60%制动级位时,其电空制动转换过程如图4所示。
由图4可知,在电空制动转换过程中减速度曲线并不平滑,出现了明显的制动力叠加现象,且电空制动转换前后的减速度并不一致。为解决此问题,在列车调试过程中,进行了多次调整控制参数的摸索和尝试。首先将电制动延迟退出时间降低为0.2 s,并将电空制动转换后的空气制动力值削减20%,发现制动力叠加现象明显改善;电空制动转换前后的制动力大小基本匹配,但是在电空制动转换后期还存在少量的过制动。

图4 参数调整前电空制动转换过程
因此需继续进行控制参数优化,在上述调整的基础上将电制动退出斜率增加到1.1 m/s3。考虑到电制动退出斜率提高后,电制动的完全退出点将有所提前。为了最大化利用电制动,将电空转换速度点再由6 km/h调整为5.5 km/h。经过多次制动测试后可看出,电空制动转换减速度曲线基本相似,但有明显改善,过制动问题亦均得到解决。
图5~7展示了其中3次电空转换的制动减速度曲线。由图5可见,在经过最终的参数调整和优化后,在电空制动转换过程中,电制动力的下降和空气制动力的上升过程基本都能吻合,整个转换过程中均无制动力的叠加现象产生,制动减速度曲线无明显波动。

图5 参数调整后的电空制动转换过程(一)
4 结语
地铁车辆的自动控制是一个闭环的控制系统,制动系统是作为被控制对象存在的。制动系统的制动力大小、制动力延迟时间及制动力建立时间的测定,有助于信号系统采用合适的控制策略来进行速度闭环控制。通过对电空制动转换控制参数的优化调整,使得制动系统的系统特性更加稳定,以满足信号系统的控制要求,有助于信号系统进一步对车辆进行精确控制。

图6 参数调整后的电空制动转换过程(二)

图7 参数调整后的电空制动转换过程(三)
猜你喜欢
中学生数理化·七年级数学人教版(2021年10期)2021-11-22
小哥白尼(趣味科学)(2021年4期)2021-07-28
云南画报(2021年4期)2021-07-22
煤气与热力(2021年3期)2021-06-09
湖南邮电职业技术学院学报(2020年3期)2020-10-13
交通运输系统工程与信息(2020年1期)2020-02-28
小学生学习指导(低年级)(2019年6期)2019-07-22
故事作文·高年级(2017年10期)2017-10-19
小学阅读指南·低年级版(2016年1期)2016-09-10
中国塑料(2016年8期)2016-06-27
