
基于激光雷达技术的智能间隙探测系统适应性分析
2019-12-28 07:31张世勇李晓宁
城市轨道交通研究 2019年12期
陈 卓 张世勇 李晓宁
(1.北京市轨道交通建设管理有限公司,100068,北京;2.城市轨道交通全自动运行系统与安全监控北京市重点实验室,100068,北京//第一作者,高级工程师)
我国城市轨道交通的全自动运行线路越来越多,采用全自动运行系统的列车未来将不配置司机,车站站台门与列车车门之间的缝隙内是否有障碍物,将会极大地影响到全自动运行线路的行车组织和安全运营。本文介绍一种新型的、能够满足全自动运行线路需求的激光雷达智能间隙障碍物探测系统。
1 城市轨道交通车站既有间隙防护与探测技术
目前,车站站台门与列车车门间隙防护与探测装置主要有物理防护装置和电气探测装置两类。物理防护装置包括站台门滑动门轨道侧倾斜防护斜挡板和防护横撑、防夹挡板、防踏空装置、车尾灯带(辅助司机瞭望);电气探测装置主要为红外探测装置和激光探测装置。电气探测装置利用的是光的直线传播原理,设置发射端和接收端,通过光线是否被障碍物遮挡来判断是否存在障碍物。
1)防夹挡板。安装位置位于滑动门轨道侧,固定在竖向门框底部。在滑动门关门过程中遇到障碍物时可阻止门体的关闭。具有结构简单、安装方便、造价低的特点。滑动门关闭后,防夹挡板将失去防护功能。目前国内城市轨道交通车站站台门均配置了防夹挡板,应用较为广泛。
2)防护横撑。安装于滑动门轨道侧,固定在竖向门框之间,主要用于缩小滑动门门框与滑动门上的玻璃之间约50 mm的间隙。具有结构简单、安装方便、造价低的特点。但是其无法防护滑动门门框外缘与车辆限界的间隙,会在一定程度上影响站台门的通透性。由于加装防护横撑会影响门体的美观性,目前仅试点安装。
3)防踏空装置。安装在滑动门门槛的侧面。缩小站台板与车体的间隙,防止乘客在上下车的过程中掉入到列车和站台门门槛之间的缝隙。具有结构简单、安装方便、造价低的特点。防护范围小,仅能防护站台板与车体部位的间隙。目前国内城市轨道交通车站站台门位置均配置了防踏空装置,应用较为广泛。
4)车尾灯带。安装于车站进站端、站台门端门外,采用独立支架安装或安装于站台门立柱侧面。站台门与车门关闭后,列车发车前,由司机通过车尾灯带瞭望车门与站台门间隙。结构简单、安装方便、造价低。距离较长时,车尾灯带的效果降低。在曲线车站及司机室无司机时,车尾灯带失去其防护功能。目前国内城市轨道交通新线均配置了车尾灯带,应用较为广泛。
5)激光(红外)对射探测装置。安装于站台门与车门间隙内,采用独立支架安装。当激光或红外光被障碍物遮挡后,探测系统会自动报警。安全性较高,适应曲线车站、全自动运行线路有人和无人值乘的工况。其缺点是:存在一定的误报率;由于探测介质为线束,存在盲区,存在安装隐患;对行车和运营有一定影响;受限界条件影响大。
2 新型激光雷达智能间隙障碍物探测系统
2.1 必要性分析
中国城市轨道交通协会于2019年8月发布的《中国城市轨道交通全自动运行系统技术指南(试行)》中要求:在全自动运行条件下,宜设置站台门与列车间隙探测装置;间隙探测装置的安装位置应满足工程限界要求,不得侵入列车动态包络线,确保行车安全;间隙探测装置应与信号系统直接接口,接收信号系统提供的有效探测启动指令,并将障碍物探测结果信息纳入信号控制作为发车条件。
根据规划,北京地铁新线将均采用全自动运行系统,将不再配置司机。物理防护措施本身的防护能力有限,仅能作为辅助措施,而传统的电气探测装置存在技术局限性,激光(红外)对射探测装置存在盲区、易受干扰等问题。因此,研发一种新型的、基于激光雷达的智能间隙障碍物探测系统,以满足全自动运行技术条件下的障碍物探测要求是必要的。
2.2 可行性分析
为解决激光(红外)对射间隙探测装置存在的安装位置易侵入列车动态包络线、有盲区、易受干扰等问题,新型的间隙探测系统应安装于站台门轨道侧站台上,或者站台门顶部的安装梁,以避开列车的限界。对于盲区的问题,新型的间隙探测系统对于障碍物探测应从线到面提升到三维,全面无死角地探测列车车门和站台门间隙的障碍物,目前激光雷达技术可以有效解决障碍物探测的盲区问题。
2.2.1 激光雷达技术
雷达是一种利用电磁波探测目标位置的电子设备。目前的雷达主要分为激光雷达与微波雷达。激光雷达与微波雷达相比具有角分辨率高、速度分辨率高、距离分辨率高、抗干扰能力强、隐蔽性好等优点、激光不受无线电波干扰、适用于复杂电磁环境等特点,因此激光雷达可以适应城市轨道交通复杂的电磁环境。
激光雷达的波长短,可以在分子量级上对目标进行探测,可以满足规范要求的对20 mm大小障碍物的探测。在功能相同的情况下,激光雷达比微波雷达体积小、质量轻,占用安装空间小,能满足限界要求。
激光雷达是工作在光频波段的雷达。与微波雷达的原理相似,利用光频波段的电磁波先向目标发射探测信号,然后将其接收到的同波信号与发射信号进行比较,从而获得目标的位置(距离、方位和高度)、运动状态(速度、姿态)等信息,实现对目标的探测、跟踪和识别。
激光雷达由发射、接收和后置信号处理三部分以及使此三部分协调工作的机构组成。激光光速发散角小、能量集中,探测灵敏度和分辨率高。
激光雷达的空间扫描方法可分为非扫描成像体制和扫描成像体制。非扫描成像体制同扫描成像体制的单元探测有所不同,采用多元探测器,作用距离较远,能够减小设备的体积和质量。但在我国,多元传感器尤其是面阵探测器很难获得,因此国内激光雷达多采用扫描成像体制。扫描成像体制的激光雷达是可以满足间隙探测系统要求的。
激光雷达发射机主要有半导体激光器、半导体泵浦固体激光器和气体激光器等。激光雷达的接收单元由接收光学系统、光电探测器和回波检测处理电路等组成,其功能是完成信号能量汇聚、滤波、光电转变、放大和检测等功能。
2.2.2 激光雷达应用的可行性
激光雷达技术主要应用于空间扫描、测距等方面。激光雷达技术应用于城市三维建筑模型,可以快速完成三维空间数据采集。在汽车及交通运输领域,激光雷达主要应用于自动泊车、ACC(自适应巡航控制)、自动刹车、无人驾驶、智能交通信号控制、交通事故勘查等方面。在城市轨道交通系统中,激光雷达主要应用于安防系统,作为周界防护的一部分。
从激光雷达技术及其应用现状来看,研发基于激光雷达技术的、满足城市轨道交通全自动运行线路需求的智能间隙探测系统是可行的。激光雷达智能间隙探测系统可以实现对列车车门和站台门间隙探测由线到面、由面到三维的覆盖,进而提升对全自动运行线路列车车门和站台门间隙探测的安全性、稳定性和可靠性。
2.3 激光雷达技术间隙探测原理
基于激光雷达技术的智能间隙探测系统,利用激光雷达作为末端探测装置,安装于轨行区站台门顶部或者底部,通过自带应用软件可实现对探测到的障碍物信息进行收集、分析、判断并预警。
激光雷达智能间隙探测系统由激光雷达旋转光学机构将激光脉冲向扫描角度内的各个方向扫描而形成二维扫描面,通过多层光幕,对列车车门和站台门之间的障碍物进行三维成像;计时器测定激光束从发射到接收的时间差,根据光的传播速度,处理器会把延迟时间转换成相应的距离,并记录存储激光回收数据;通过软件模拟计算,并与边界条件进行对比分析,进而确定遮挡物的大小及位置信息。
探测原理为:激光雷达探测器内置马达高速运转,将一定强度的激光,通过一定角度的光学机构发射出如图1所示的二维扇形光幕;通过多层光幕,照射到障碍物表面后发生漫反射;部分光会损失掉,另一部分光反射回激光探测器,使得物体进行三维成像;当反射回来的光达到一定设定阈值,就可以作为判断依据;阀值由激光雷达探测器内部模拟分析软件算法进行定义。
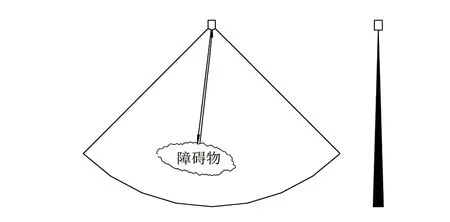
图1 激光雷达光幕示意图
2.4 城市轨道交通应用环境的基本要求
激光雷达智能间隙探测系统,应满足城市轨道交通运营环境下(包括振动环境、空气环境、湿度、温度环境等)的探测要求;应设置独立的监控主机,能自行监测其状态信息和探测结果,具有人机交互的显示屏,能实时查看系统状态、报警记录、设定参数,具备一定的存储功能,其数据应能进行下载;应能探测到光斑范围检测边长不小于20 mm的物体,且物体在运动过程中遮挡住激光探测报警器时,系统也能输出报警信息;设置在轨道侧,最外边缘到轨道中心线的距离应满足限界要求,不得侵入车辆限界影响列车运行;应能把一侧站台所有的探测信号总成为一个探测信号上传到信号系统,实现与信号系统的联锁;应具有旁路功能,设置有旁路开关以及独立的声光报警装置;可以实现车站站台就地监测,探测结果信息也应能上传到信号系统/综合监控系统;设置应满足国家相关规范及法规要求;应具有国家相关检测部门出具的符合GA/T 1158—2014《激光对射入侵探测器技术要求》的检测报告;需进行安全完整性认证,且不低于SIL2级。
2.5 全自动运行线路应用的基本要求
1)探测区域。以列车的每个车门或者以每列列车为一个探测区域,站台滑动门旁边的固定门区域也应纳入探测范围。在站台固定门位置若有障碍物,探测系统应能精确定位该障碍物的位置,以方便车站工作人员应急处理;某个位置的探测装置出现故障时,可以单独进行旁路,不影响其他区域内的探测装置的使用。
2)探测精度。激光光幕是由一定数量呈扇形分布的激光射线组成,射线之间存在一定的夹角,同时激光射线自身也存在一定的发散角,因此,在探测区域的远端,激光射线形成光斑,光斑与光斑之间存在一定的间隙,此间隙的大小是影响激光雷达的探测精度的主要因素。此间隙的大小,可以在激光雷达硬件选型时予以定制。可参考激光(红外)对射探测装置的精度要求:应能检测边长不小于20 mm的物体,且物体在运动过程中发生遮挡时,系统也能输出报警信息。建议激光雷达智能间隙探测系统的精度与激光(红外)对射探测装置的精度保持一致。
3)安全防护等级。对于全自动运行线路,激光雷达智能间隙探测系统需独立接入信号系统,参考《城市轨道交通全自动运行系统技术规范》及国内类似工程对站台门系统安全防护等级的要求,该系统需进行安全完整性认证,且安全等级不低于SIL2级,以提高系统的安全性。
2.6 激光雷达智能间隙探测系统技术方案
激光雷达智能间隙探测系统主要由激光雷达探测器、控制主机、就地控制器等组成,如图2所示。

图2 激光雷达智能间隙探测系统构成示意图
1)激光雷达探测器。负责执行探测功能;自带模拟计算软件,可确定遮挡物的大小及位置信息;安装在站台门顶部,每道门设置一组激光雷达。
2)控制主机。设置在站台门设备室,是激光雷达探测系统的控制中枢;负责控制雷达探测器的启停、障碍物信息报警及上传;负责监测系统的运行状态及故障信息;提供系统与相关接口专业的接口位置。
3)就地控制器。位于车头位置端门外或者站台门系统PSL(就地控制盘)旁,具备障碍物信息的声光报警提示、系统旁路操作等功能。
激光雷达智能间隙探测系统独立成系统,信号系统在发送站台门关门命令的同时发送“启动探测”命令给激光雷达智能间隙探测系统,激光雷达智能间隙探测系统收到信号系统的命令后启动工作。信号系统在发出“启动探测”命令后开始计时5 s(可调);一旦检测到激光雷达智能间隙探测系统反馈的“有障碍物信息”,重新启动计时;直到持续5 s(可调)计时内一直没有检测到障碍物且站台门及车门关闭锁紧后,允许发车。否则信号系统不允许发车,并通知人工处理。
激光雷达智能间隙探测系统至少具备如下功能:激光雷达探测器配置模拟软件,具备边界条件自学习功能;具备障碍物探测功能,能精准定位障碍物所在的滑动门位置;系统接入信号系统并具备独立的旁路功能;系统具备故障自诊断并报警功能、运行状态显示及声光报警提示功能、事件及报警记录自动存储及查询功能;具备手动和自动两种操作模式。
激光雷达的光源应为不可见光,不对人体造成伤害,且满足相关国家标准的要求;有效探测距离不小于5 m;光幕应为多层,扇形光幕角度不小于90°。
使用激光雷达终端数量不同,系统的造价不同。以8A编组列车为例,对于岛式车站,每列车设置一组激光雷达探测器,含主机及软件等的激光雷达智能间隙探测系统单车站的造价约为120万元。在系统成熟后,通过优化激光雷达探测器终端数量,可以大大降低单站的系统造价,满足今后的推广应用。
3 结语
综上分析,基于激光雷达技术的智能间隙探测系统应可适用于城市轨道交通列车车门和站台门间隙的障碍物探测,但需经实地检验和测试。经各类检测和认证之后,该系统才能应用于城市轨道交通现场项目中。
猜你喜欢
北京测绘(2022年5期)2022-11-22
汽车观察(2021年8期)2021-09-01
快乐语文(2021年15期)2021-06-15
童话世界(2020年13期)2020-06-15
铁道通信信号(2020年9期)2020-02-06
模具制造(2019年7期)2019-09-25
民用飞机设计与研究(2019年4期)2019-05-21
故事大王(2019年4期)2019-05-14
中国交通信息化(2019年1期)2019-03-26
电子制作(2018年23期)2018-12-26
