模糊神经网络自动控制算法在智慧农业中的设计与应用
2020-01-07 02:44邹承俊
网络安全技术与应用 2020年1期
◆文 燕 邹承俊 叶 煜 李 敏
模糊神经网络自动控制算法在智慧农业中的设计与应用
◆文 燕 邹承俊 叶 煜 李 敏
(成都农业科技职业学院 四川 611130)
随着物联网技术的深入应用,建立智能化、自动化和精准化的现代农业控制系统是现代农业生产与管理的发展方向。该设计通过对模糊控制系统模型和神经网络的分析与深入研究,利用模糊推理和神经网络分析训练的有机结合得到最优控制策略,设计出基于模糊神经网络的自动控制算法,并将所设计的算法应用到现代农业生产的温度控制中实现自动控制,经成都农业科技职业学院现代农业大棚的农业信息数据样本实验与测试,能够满足现代农业控制领域的自动控制需求。基于模糊神经网络的现代农业自动控制算法的设计与应用,能够推动中国农业现代化、信息化、自动化、智能化的加速发展,应用该算法所实现系统的通用性、可扩展性良好,为下一步推广应用在其他领域的自动控制的研究奠定坚实的基础。
模糊控制;神经网络;模糊神经网络;自动控制;智慧农业
由于信息技术不断发展,农业经营活动的种植方式已经向机械化、精准化、智能化的现代转变。在发达国家的农场里,智能化的农业经营生产管理系统已非常常见,智能化的管理系统是通过WSN自动采集农作物生长过程的环境参数信息,并使用自动化方法实现对农作物生长环境的监测、控制、管理和储存,既能够有效提升农作物产量,又能够保证产品质量。在我国,这种智能化的农业生产管理方式尚未得到很好的推广应用,但随着物联网技术的应用深入,国家从政策和经济上对农业的大力扶持与投入,许多智慧农业示范园区已经初具规模,也有一些智慧农业系统开发基于模糊控制或者神经网络算法的智能控制系统,这些单一模糊控制系统,不能够很快适应变化的社会环境。
在农业生产管理的自动控制技术中,由于环境数据会不断发生变化,很难准确地对环境对象进行建模。基于此,现有的模糊控制满足不了农业环境迅速变化的现代农业的自动控制要求,而现阶段所应用的农业环境变化分析和验证的基于神经网络分析算法在农业环境的适应性比较差。因此,本文把模糊控制与神经网络分析算法有机结合到一起,发挥了二者的最大应用价值。以模糊神经网络为基础的控制是通过适应性训练数据获得适合当前农业环境的最佳管理策略,把最佳控制策略以及适应性训练应用在现代农业的灌溉与温度的自动控制与管理中,既节约水资源又保障作物最佳生长环境,最终有效提高作物产量与质量。
1 模糊控制系统的模型分析
模糊控制能够看作是将模糊集理论以及模糊逻辑推理作为基础的技术。它的本质是可归为智能控制领域的非线性控制,其显著特征是有相对成熟的理论作为支撑,并且在真实场景中的应用比较广泛。对于应用主动控制模式的智能终端来讲,要求将相关的自动控制算法在嵌入到CPU中进行运行,从智能控制的角度来讲,模糊神经网络相关算法运用的比较多。常规的控制方式要求针对被控项目实现精准建模操作,建模越精准,对应发出的控制信息更准确。但对于真实的应用场景,由于其存在的变量比较多且处在不断变化当中,倘若利用控制参数的方式达到简化系统的目标,对应的控制信息通常就不够精准。因此,在这样的大环境下,将模糊控制算法应用在变量较多的实际场景中,能够发挥自动控制的作用。本系统由选取输入变量、模糊控制器、执行机构、被控对象以及变送器组成,系统相关的结构模型具体如下图1所示。
输入输出接口:模糊控制器经输入接口获得数据,并且经输出接口把其转变成模拟信号,以对被控对象进行调控。
模糊控制器:PC或MCU及其相应的软件,包括模糊化,模糊推理以及去模糊化。
模糊化:将精确地输入变量通过隶属度函数转变为口语化变量,得到的此种变量称为模糊子集合。
模糊推理:这个步骤要求制定相关的模糊控制规则。模糊控制规则是以人类经验为基础设置的,其要具备充足知识以及网站经验。
解模糊化:这个步骤需要把模糊逻辑推理获得的相关模糊值转变成精准的信号,把其当作输入参数。
执行机构:它应包含电动以及气动调控装置,如电动机、控制阀等。
被控对象:它既能为缺少精确数学模型的对象,也能够是具有更准确数学模型的对象。
变送器(系统输出反馈器):这个步骤把收到的信号转换为控制信号并使其输出。
模糊控制规则的制定是模糊控制算法关键,一般有两种方法通过If…then 确定模糊控制规则,一是系统信息依据专家经验运算得到,从理论上讲这种方法允许系统以最佳状态工作,但是因为实际条件的改变通常要对规则进行反复尝试以及更改。另一种是系统信息依据现场工作人员的经验获取,虽然此种方法未经理论运算,然而它常常使系统工作在更好的状态,需经验丰富的人员进行不断调试。模糊控制算法在应用现场并不依赖精确的数学模型,即使其可以实现系统的智能控制,也很难比较快速的使系统调整到最佳状态,可以依据运算以及经验获得隶属函数以及模糊控制规则,不依赖应用场所的准确模型。
2 神经网络的分析与研究
神经网络在模式识别和分类、识别过滤、自动控制和预测方面展现了其非凡的优势,通过不断分析与适应性训练的过程从海量的信息中获得一定的规律性。在自动控制以及智能化领域BP算法使用最普遍,BP网络能学习和存贮大量的输入-输出模式映射关,是一类通过误差逆传播算法训练得到的多层前馈网络,采用梯度下降方法连续调节网络的阈值与权重,以最小化网络的平方误差之和。BP算法由数据流的正向传播和误差信号的反向传播两个过程构成,其三层神经网络的拓扑包括输入层、隐藏层以及输出层,如图2所示。
在进行正向传播时,传播方向为输入层→隐层→输出层,每层神经元的状态只影响下一层神经元。若在输出层得不到期望的输出,则转向误差信号的反向传播流程。通过这两个过程的交替进行,在权向量空间执行误差函数梯度下降策略,动态迭代搜索一组权向量,使网络误差函数达到最小值,从而完成信息提取和记忆过程。
在BP网络算法里,信号在正向方向上运算,并且在利用误差调节阈值以及权重时反转,依照每层输出的对应误差预估上一层的误差情况,以此得到整个网络对应的误差值。由于其具备比较强的自学习能力以及非线性映射能力,能够针对工农业真实场景中的信息进行训练,得到最优化的控制策略。
3 基于模糊神经网络算法的设计
模糊神经网络是模糊理论与神经网络两者彼此结合得到的产物,把学习、联想、识别、信息处理结合在一起。由于模糊控制不会对准确的模型产生依赖,因此推理速度慢,准确度低。然而,神经网络分析算法可以学习现场场景数据并获得最优控制策略,却不能处理模糊信息。因此,模糊控制和神经网络分析的结合可以相互补充,并在农业现场处理模糊信息,还可以通过训练得出系统的最优模糊控制规则和策略。此外,输入信号在处理模糊量方面具有较大优势,还能够利用对样本的训练调节网络权值与偏差,快速收敛,提高算法效率。
将模糊神经网络对应的拓扑结构划分成四层,具体如下图3所展示。首层是输入单元,该层把输入的模糊参数传至下层单元;第二层是隶属函数单元,该层对输入的参数隶属度情况进行描述,一般应用三角函数进行表述等;第三层是控制规则单元,具体涵盖了模糊控制的相关规则;第四层是输出由神经网络处理信息的输出单元。

图3 模糊神经网络的拓扑结构
模糊神经网络算法不同层间对应的传输规则如下:



第一层是输入层,其中该层的输入可传至下层输出。输入输出关系是:


第二层是隶属函数层,这一层重点描述了输入参数的隶属度情况,一般用三角函数进行表示等,对应的输入输出关系如下:






第四层为输出层,本层输出是通过网络处理的信息。第个输出单元对应的输入输出关系如下:


在进行神经网络训练之前,先要使用随机数、初始化权重以及输出阈值,再通过梯度下降方法对样本进行训练。目标函数是:

利用神经网络多次学习和适应性训练以后,能够得到训练之后的相关隶属函数以及对应的最优模糊控制规则。
基于模糊神经网络控制算法有机结合了模糊控制和神经网络分析的最优价值的一种自动控制算法。在智能农业智能控制系统中,模糊神经网络控制算法需要首先让控制系统在被动控制方式下运行并完成样本采集工作。接下来,选取模糊输入参数以及相关的隶属函数,把取样结果当作训练的基础数据输入到对应的神经网络当中,获得训练以后的隶属函数以及对应的控制规则,在此基础上创建自动控制系统。最终,把有关控制规则录入到智能控制终端对应的程序当中,当系统处于自动控制状态时,能够依照预设的控制规则实现系统中相应的智能控制功能,从而达到智慧农业中的精准化、智能化的控制功能。
4 基于模糊神经网络控制算法的应用
智能控制是农业领域实现自动化、智能化管理系统最重要的组成,因此,以模糊神经网络为基础的自动控制算法在智能农业中使用比较广泛,尤其是在解决现代农业的灌溉控制和温度控制的自动化等问题方面。本文把所涉及的模糊神经网络算法应用于智能农业的自动温控系统,利用选取的输入参数以及对应隶属函数得到最优化的自动控制以及相应的温控规则。由于农业生产环境实时变化而比较复杂,对应的输入参数以及隶属函数有显著差异,所以相应的控制规则也会随之各不相同。在真实的应用场景中,能够采用更改输入参数以及对应隶属函数的方式,获得不同条件下的控制规则,满足自动控制的需求。
基于模糊神经网络的温度自动控制系统算法应用与测试:
在智能农业系统应用过程中,设施农业环境中的温度自动控制系统也重要组成部分。温度自动控制系统可根据设定温度计算温差和温度变化率,通过神经网络分析获得最佳送风时间,通过控制系统使得设施农业环境内维持在设定的恒定温度,让作物在最佳环境下生长,从而提高农作物的产量与品质。
在应用了模糊神经网络的温度自动控制系统中,仍然包括输入、隶属函数、控制规则和输出四层。
第一层是输入层,该层选取输入变量温度差和温度变化率两个单输入的模糊控制变量,把本层输入传至下层输出。将温度差以及温度变化率等划分成N、Z等模糊阈,P代表正,N代表负;B、M、S、Z分别表示大、中、小、零。
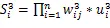
第二层是隶属函数层,在该层确定温度差与温度变化率的隶属函数与两者的模糊阈范围,如图4所示。
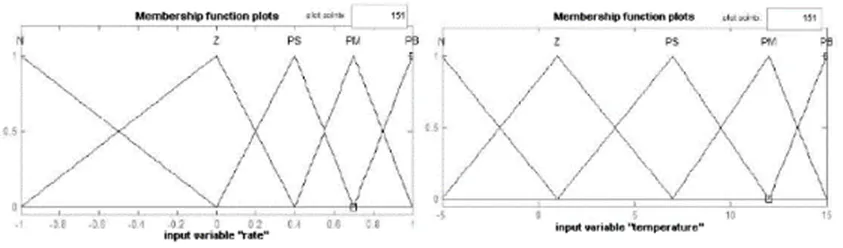
图4 温度差与变化率的隶属函数
第三层是控制规则层,该层执行全部模糊控制规则的处理。
第四层是输出层,该层选择通风时间作为输出。能够把通风时间划分成S(小)、M(中)、L(大)、VL(非常大)等模糊阈。
本设计利用成都农业科技职业学院温室农业大棚的农业信息数据库作为采样数据,来调试和验证智能农业温度自动控制系统的功能。采用Matlab软件对2000组温度差,温度变化率和通气时间信息进行训练,作为神经网络算法的训练样本信息,然后将1000组数据当作验证样本。在训练中,误差是0.01,次数是2000,结果见图5。
如图5 训练结果
经过2000次训练,从训练结果可以看出系统训练函数收敛,主平方误差小于0.1。通过训练之后,可以获得训练之后温度与温度变化率的隶属函数以及最优模糊控制规则。最优模糊控制规则如表1所示
表1 温度最优模糊控制规则
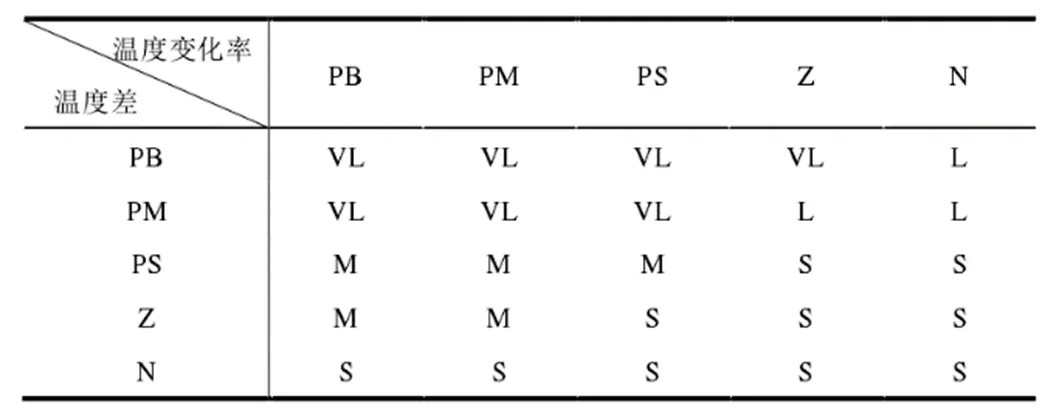
通过对训练之前与之后隶属度函数图比较可以看出,利用神经网络训练对初始隶属函数进行调整,能够获得训练之后的输入隶属函数以及最优模糊控制规则。在基于模糊神经网络的温度自动控制系统软件程序里,训练之后的最优模糊控制规则在温度自动维持比较科学的恒定温度,减少人为错误并节省能源,使温室中的作物在最佳环境中生长。
5 结论
在对模糊控制原理和神经网络分析研究的基础上,将模糊控制算法与神经网络分析有机结合设计出一种的基于模糊神经网络自动控制算法。结论:以模糊神经网络为基础构建的拓扑结构具体涵盖了四层,输入层是选取模糊控制变量作为输入变量,直接传到下一层,隶属函数层制定隶属函数和划分模糊阈的范围,控制规则层进行所有模糊控制规则的处理,输出层选择输出变量。最终,在农业实际应用中,以自动温控为基础,制定了以模糊神经网络为基础的自动控制系统,利用模糊推理的方式获得最佳控制策略。利用成都农业科技职业学院现代农业示范基地和温室农业大棚所采集的农业信息数据作为样本进行测试验证,以模糊神经网络为基础的自动控制算法能够满足农业系统中自动控制方面的要求,能够在现代农业系统中实现智能温控等智能化功能,并且所得的系统通用性、可扩展性良好,为下一步在其他领域的研究奠定基础,经过改进也可以在工业、畜牧养殖、水产养殖等控制领域进行推广应用。
[1]韩明月.面向现代农业的物联网自动控制系统设计[D]. 哈尔滨工业大学,2016.
[2]Gasore Geoffrey,Munyaneza Jean de Dieu,Ngendabanga Jean Pierre,Twibanire Aimable. Design of Automatic Irrigation System for Small Farmers in Rwanda[J].Agricultural Sciences ,2015.
[3]朱兴荣.物联网在湖南现代农业中的应用研究[J].软件工程师,2013(11):60-62.
[4]Yingying QIN.Talking about Shirenzigou of Urumqi Highway Beltway,Tunnel Construction Plan under Conditions of V-class Surrounding Rock[A]. International Journal of Intelligent Information and Management Science[C]. 2015:5.
[5]王文新.自动控制技术在园林节水灌溉中的应用[J].电子制作,2013(05):67.
[6]尹光志,李铭辉,李文璞,曹偈,李星.基于改进BP神经网络的煤体瓦斯渗透率预测模型[J]. 煤炭学报,2013(07):1179-1180.
[7]Bing Wu,Shaojun Han,Jin Xiao,etc. Error compensation based on BP neural network for airborne laser ranging[J]. Optik - International Journal for Light and Electron Optics,2016:1.
[8]刘现华.绿地灌溉模糊控制系统的MATLAB实现[J]. 湖南农业科学,2012(23):103-105.
[9]王述彦,师宇,冯忠绪.基于模糊PID控制器的控制方法研究[J].机械科学与技术,2011(01):166-172.
[10]侯培国,杨靖,卢志刚,吴士昌.一种结构简单的四层模糊神经网络的设计[J].燕山大学学报,1998(04):337-340.
中国教育和科研计算机网络—赛尔网络下一代互联网技术创新项目(编号:NGII20180316);成都农业科技职业学院科研项目(cny19-34);成都农业科技职业学院科研项目(cny19-35)。
猜你喜欢
今日农业(2022年13期)2022-09-15
汽车实用技术(2022年15期)2022-08-19
选煤技术(2022年2期)2022-06-06
今日农业(2021年19期)2022-01-12
今日农业(2021年14期)2021-10-14
小学科学(学生版)(2021年6期)2021-07-21
湖北工业大学学报(2021年2期)2021-04-28
成都信息工程大学学报(2021年6期)2021-02-12
电子制作(2019年16期)2019-09-27
北京航空航天大学学报(2017年1期)2017-11-24