
整杆式甘蔗收割机集蔗装置的结构设计
2020-01-16 06:15陈高峰叶才学莫建霖曾伯胜
广西农业机械化 2019年5期
陈高峰 陈 志 叶才学 莫建霖 曾伯胜
(广西农业机械研究院有限公司 蔗糖产业省部共建协同创新中心 南宁 530000)
0 引言
在我国,甘蔗种植业主要分布在广东、广西、云南及海南,4省区合计甘蔗种植面积为170万hm2,年生产甘蔗约1.4亿t,是各大省的重要经济支柱产业之一。[1]目前,我国大部分蔗区的甘蔗生产工作还是以人畜结合,劳动强度大,效率低,成本高,甘蔗生产的机械化水平低。以广西为例,广西是我国最重要的糖料生产基地,甘蔗生产机械化水平发展滞后导致了广西甘蔗生产成本居高不下、国际竞争力较为低下,严重影响了广西甘蔗生产的稳定发展,成为阻碍我国蔗糖产业做大做强的主要因素。[2]由此引起国家重视,近年来国家大力推进农机补贴,发展农业机械化生产,农户购机门槛大大降低,同时甘蔗种植农艺向机械化倾斜,注重强化农机农艺融合,为提升甘蔗全程机械化水平夯实基础,[3]甘蔗机械化生产从而逐步推广开来。
广西农业机械研究院有限公司研制开发的整杆式甘蔗收割机集蔗装置,能对整杆甘蔗进行收集、归整及倾卸,适用于甘蔗地的甘蔗机械化收集工作。该装置是按照功能多样化,结构轻简化,提升作业效率的技术思路进行设计、研制的。其结构简单,操作便捷,作业灵活,大幅提高了甘蔗收集与归整效率,方便甘蔗流转,现对其结构特点与原理进行分析,并通过实验进行验证。
1 工作原理和结构特点
1.1 设计原则
(1)适用于整杆甘蔗收割后的甘蔗归集需要。结合我国南方甘蔗种植的农艺实际情况,在对比和吸收国内外先进整杆甘蔗归集装置的基础上,设计出一种结构合理、符合我国甘蔗收获作业情况的集蔗装置。
(2)具备左右摆动功能。为了方便甘蔗田间收集及转运,集蔗装置要具有左右摆动功能,以便根据实际工况需要,可以摆动到指定角度,然后卸料。
(3)具有甘蔗归集整理功能。通过对集蔗箱体的倾斜操作,使集蔗箱体内的甘蔗茎杆滑落向集蔗箱体的一端归集,蔗根基本平整。
(4)具有实时称重功能。作业者需要对甘蔗收割机收获到集蔗箱体内甘蔗茎杆的重量进行实时了解,以便掌握卸料转运的时间,因此要设计具有实时称重功能的集蔗装置。
(5)主要零部件的互换性和可靠性。确保作业效果并且在结构强度允许的前提下,尽量优化设计以减轻集蔗装置的重量、节省材料、方便运输,同时注意零部件的互换性,可装配性等要求。
1.2 结构特点
整杆式甘蔗收割机集蔗装置主要包括摆动驱动装置、水平吊臂、油缸、销轴、垂直吊臂、拉力传感器和集蔗箱体等,如图1所示。摆动驱动装置由液压马达、蜗杆、圆形齿轮与底座组成,可在左右90°范围内任意旋转。水平吊臂通过螺栓与摆动驱动装置联接。垂直吊臂的上端通过销轴、油缸与水平吊臂相连,垂直吊臂的下端与集蔗箱体之间通过四个拉力传感器相连,用于集蔗箱体质量的测量。集蔗箱体上部框架为固定式结构,下部框架为活动的对开式结构,通过两侧面油缸控制开合。

图1 整杆式甘蔗收割机集蔗装置结构示意图
1.3 工作原理
整杆式甘蔗收割机集蔗装置的工作原理如图2所示。收割机作业一段时间后,拉力传感器向驾驶室传送集蔗箱体装入的甘蔗茎杆质量数据,驾驶员根据显示的数据判定此次甘蔗收割完成。接着驾驶员通过操纵油缸控制集蔗箱体往后端倾斜,使甘蔗茎杆滑落向集蔗箱体的后端归集平整。然后调平集蔗箱体,操纵摆动驱动装置向左或向右旋转,带动集蔗箱体一同旋转,摆动到指定位置后,将集蔗箱体内的甘蔗茎杆卸到其它转运车或地面上。

图2 集蔗装置工作原理图
2 关键部件设计
2.1 水平旋转吊臂
水平旋转吊臂由法兰底板、主梁、油缸支座板、销轴耳板组成,如图3所示。水平旋转吊臂的法兰底板通过螺栓与摆动驱动装置连接紧固。根据设计要求以及实际工作情况,对旋转吊臂结构进行刚度和强度校核。

图3 水平旋转吊臂的结构示意图
水平旋转吊臂长2650 mm,即为集蔗装置的旋转半径。主梁为旋转吊臂的关键件,按设计要求旋转吊臂可吊起2000kg左右的重物,为了保证集蔗装置旋转过程中的平稳性,防止旋转吊臂挠性变形大,主梁采用了结构用矩形冷弯空心型钢,规格为200 mm×100mm×6mm,材料为345A。该旋转吊臂在摆动驱动装置的驱动下,可以使集蔗装置左右旋转,旋转活动范围为180°。可解决传统固定式卸料不灵活的问题,能实现多角度卸料,方便后续甘蔗装车转运。
设计中要对主梁进行强度校核,对其进行受力分析如图4所示。在作业过程中,旋转吊臂主要受到集蔗箱体及其箱体内甘蔗质量所形成的拉力F,主梁可视为悬臂梁,根据悬臂梁的受力分析,主梁a处承受较大的扭矩作用,为危险截面,容易发生弯曲折断现象。为了作业安全,需要对危险截面进行强度和刚度校核计算,以满足作业需求。
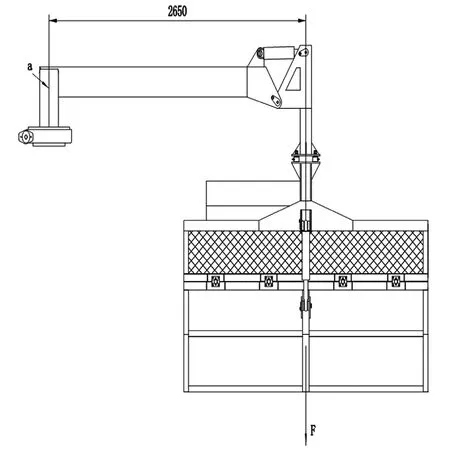
图4 主梁强度校核示意图
危险截面是弯矩最大的面,a处所受的弯矩M的计算按式(1)计算:

式中:
F—主梁承受的作用力,N;
m1—集蔗箱体重量,kg,质量为 475kg;
m2—集蔗箱体收集的甘蔗理论重量,kg,质量为800kg;2
g—10m/s。
L—力臂,mm,臂长为2650mm;
M—危险截面所受的弯矩,N·mm。
根据式(1)计算得主梁a处的危险截面所受弯矩为33787500N·mm,弯矩作用下的正应力σ通过式(2)计算:

式中:
M—危险截面所受的弯矩,N·mm;
Wx—抗弯截面系数,cm3,查《机械设计手册》第五版,[4]得 Wx=170.332cm3;
σ—正应力,Mpa。
根据式(2)所示计算得正应力σ为198.4 Mpa。
根据《机械设计手册》第五版可知,抗拉强度σb为 470~630Mpa,核对 σ 与 σb得 σ<σb,即该主梁强度足够。
2.2 垂直吊臂的设计
垂直吊臂由下销轴圆筒、上销轴耳板、腹板、大方管和连接底板组成,如图5所示。垂直吊臂的连接底板通过四个拉力传感器与集蔗箱体的顶部连接座相连,由拉力传感器两端的螺母将两者锁紧紧固。集蔗箱体内收集一定数量的甘蔗后,拉力传感器将甘蔗重量反馈到中控显示器,提示甘蔗收集质量。当集蔗箱体内收集的甘蔗茎杆到达一定量后,收割机停止收获作业,操作油缸的活塞杆伸出,使集蔗箱体后端向下倾斜到一定角度,使集蔗箱体内的甘蔗茎杆在自身重力作用下滑向箱体后端,甘蔗根部基本都触碰到集蔗箱体的后端挡板,然后再操作油缸把集蔗箱体恢复至水平位置,再把集蔗箱体内的甘蔗茎杆卸落到其它转运车或地面上,这样卸下来的成堆甘蔗的根部基本平齐,显得较整齐,也便于后续的打捆或装运。本装置结构设计集蔗箱体的最大倾斜角为36°,该倾翻角度,经过多次实验测试,满足甘蔗通过重力滑落要求。

图5 垂直吊臂的结构示意图

图6 集蔗箱体倾斜示意图
2.3 集蔗箱体的设计
集蔗箱体是整杆式甘蔗收割机集蔗装置中的一个重要部件,其结构如图7所示,主要由连接座、抱臂焊合、顶挡板、集蔗箱体上半部框架、工业合页、集蔗箱体下半部框架、集蔗箱体油缸和定位锁定销组成。

图7 集蔗箱体的结构示意图
集蔗箱体箱体连接座通过螺栓与倾翻吊臂相连。集蔗箱体设置有顶挡板,目的是在甘蔗收集时防止甘蔗由于惯性飞出斗外。集蔗箱体的上半部框架为固定,下半部框架为对开活动式,活动部分与固定部分通过工业合页相连,工业合页每侧4套,共8套。集蔗箱体的两侧面安装有翻转油缸。集蔗箱体上半部框架由方管与铁丝网焊接而成,三面均为铁丝网。集蔗箱体下半部框架由方管与薄铁板焊接而成,分为左右对称两部分,尾部焊接有定位锁定销。
收集甘蔗时,集蔗箱体油缸控制下半部框架闭合,闭合时下半部框架中的定位锁定销将插入上半部框架的定位孔中,紧闭牢固后才能进行甘蔗收集。定位锁定销的作用在于帮助下半部框架的对准闭合位置,同时在集蔗箱体倾斜归整环节,抵抗甘蔗的滑落冲击力,避免下半部框架被外力冲击变形。集蔗箱体设计2重量为362kg,长度为 2.6m,装载横截面积为 1m,可收集甘蔗重量为800kg,集蔗箱体满载设计重量为1162kg。
为了防止整机的作业时倾覆,需对整杆式甘蔗收割机集蔗箱体部分进行了受力分析,如图8所示。
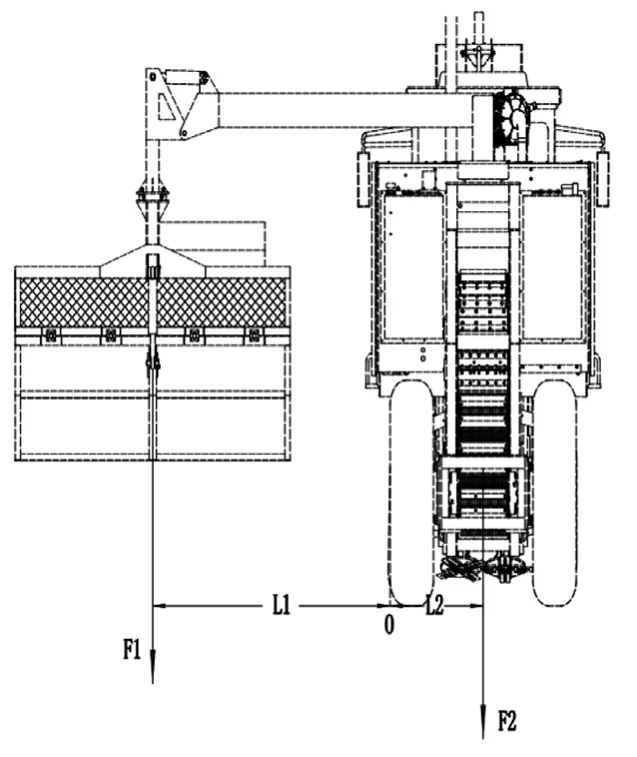
图8 集蔗箱体装置受力分析
根据图8的整体受力分析,应用杠杆平衡原理,按式(3)、式(4)和式(5)计算满载后集蔗箱体理论重力和每斗甘蔗截面,以此校核整机的作业安全性能。

式中:
F2—阻力,N;
m1—甘蔗收割机重量;
g—10m/s2。

式中:
F1—集蔗箱体满载理论重力,N;
L1—动力臂,m;
L2—阻力臂,m。

式中:
k—安全系数,取1.3;
m2—集蔗箱体满载理论重量,kg。

式中:
S—集蔗箱体内甘蔗截面,m2;
m3—集蔗箱体内甘蔗重量,kg;
ρ—甘蔗密度,1000kg/m3;
l—甘蔗长度,2.5m;
k1—甘蔗空间占比率,75%。
该机重量 m1为 5450kg,阻力臂 L2为 0.85m,阻力F2为54500N,动力臂L1为1.8m,经公式(3)、(4)计算得出满载后集蔗箱体理论重力F1为25736N,考虑到作业安全,防止收割机倾覆,增加安全系数K为1.3,2所以经公式(5)计算,集蔗箱体满载的理论重量m为1979.7kg,该设计集蔗箱体满载重量为1162 kg(集蔗箱体重362kg,甘蔗重800kg),满足使用要求。
切稍后的甘蔗长度一般小于2.5m,因此集蔗箱体长度设计为2.6m。根据目前甘蔗生产工艺与甘蔗田间机械流转能力,考虑到作业节拍与效率,集蔗箱体满载收集甘蔗重量应为600~800kg,该集蔗箱体设计满载甘蔗收集量m3为800kg,满足使用要求。经2公式(6)计算得出,集蔗箱体满载甘2蔗截面S为0.43m,而该集蔗箱体设计装载截面为1m,满足使用要求。
2.4 摆动驱动装置设计
摆动驱动装置内部结构采用回转支承和环面包络蜗杆相结合,由包络蜗杆与斜齿轮啮合传动、蜗轮与包络蜗杆啮合传动,具有多齿接触、传动扭矩大、旋转平稳的优点,当选用减速比大于50时,自锁效果更佳。摆动驱动核算如下。
集蔗装置满载甘蔗启动转矩核算如式(7):

式中:
φ—集蔗装置从静止转到指定角度,rad;
t—集蔗装置从静止转到指定角度所需时间,s;
α—集蔗装置从静止转到指定角度所需加速度,s-2。

T—集蔗装置在一定时间内从静止转到指定角度所需转矩,单位N·m;2
I—集蔗装置的转动惯量,单位kg·m。
设计要求集蔗装置在8s内从静止转到指定角度π/2,在solidworks软件中建模,得到装载800kg甘蔗后,蔗斗绕回转驱动的转动惯量l,即以实际旋转位置为输出坐标系,可得 l=11327.4kg·m2,
由式(7)、式(8)可得式(9):

即集蔗装置在8s内从静止转动到π/2所需扭矩为1111.5N·m。
计算所需马达转矩Te如式(10):

Te—马达转矩,N·m;
i—回转驱动减速比,取i=88;
η—回转驱动效率,取η=50%;
f—阻力系数,取f=2.0;
n—富余系数,取n=2.0;
根据公式(10)可计算得对应马达转矩为101.0 N·m。
预选徐州丰禾回转支承制造有限公司生产的回转驱动,型号SE13-88-25R-FB,其主要参数为:减速比88:1,额定输出转矩4600N·m,额定输入转矩105N·m,倾翻力矩75100N·m,保持力矩45000N·m,精度等度≤17°,可自锁。
集蔗箱体满载甘蔗后,摆动驱动所承受力矩33111.8N·m,小于保持力矩45000N·m,且所需马达转矩101.0N·m,小于额定输入转矩105N·m,主要参数达到设计要求。
3 主要设计参数
整杆式甘蔗收割机集蔗箱体装置的主要技术参数和性能指标如表1所示。
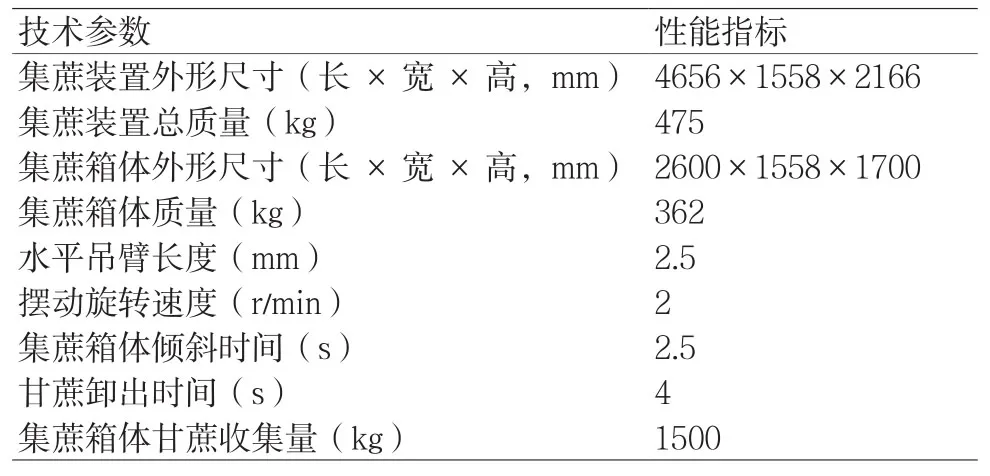
表1 主要技术参数和性能指标
4 结语
本研究设计的整杆式甘蔗收割机集蔗装置是按照功能多样化,结构轻简化,提升作业效率的技术思路进行设计的。其结构简单,操作便捷,作业灵活,可大幅提高了甘蔗收集与归整效率,方便甘蔗流转,与传统作业的集蔗装置具有更大的优势。
猜你喜欢
农民致富之友(2020年20期)2020-07-18
石油和化工设备(2020年5期)2020-06-09
今日农业(2019年11期)2019-08-15
农民致富之友(2018年18期)2018-07-14
中国铸造装备与技术(2017年6期)2018-01-22
大陆桥视野·下(2017年8期)2017-09-19
创新作文(3-4年级)(2016年5期)2017-05-16
工业设计(2016年4期)2016-05-04
现代商贸工业(2016年35期)2016-04-09
专用汽车(2016年9期)2016-03-01
