
后缘连续偏转机翼振荡射流控制的数值模拟研究
2020-01-21 09:36刘影李春鹏张铁军钱战森
航空科学技术 2020年5期
刘影 李春鹏 张铁军 钱战森
摘要:针对民用飞机连续偏转后缘机翼在起降大偏度状态由于后缘流动分离导致升力损失的问题,选取振荡射流发生器开展流动控制机理和应用研究。首先基于二维流场通过给定不同入口参数分析了控制器内外流场结构的变化规律,然后选取典型民机机翼二维翼段,通过对常规开缝后缘襟翼和有/无控制器的连续偏转后缘开展升力特性和流场结构的对比,分析了振荡射流发生器在三维流场的流动控制能力。结果表明,振荡射流发生器能够通过输出周期性摆动的高速射流有效消除后缘翼面分离,使连续偏转后缘的升力达到与开缝襟翼相当的水平。
关键词:振荡射流发生器;后缘分离;流动控制
中图分类号:V211.3文献标识码:ADOI:10.19452/j.issn1007-5453.2020.05.005
基金项目:国家研究项目“变弯度机翼技术(VCAN)”
流动分离是飞机绕流中普遍存在的现象,往往会使得飞机的阻力增大、升力减小,甚至导致失速提前,对飞行造成严重危害。因此,加深对分离流动物理过程的认识,发展分离流动控制技术,一直是人们关注的焦点。
流动控制技术按控制方式分为被动控制与主动控制,被动控制是没有辅助能量消耗的流动控制方法。这种控制技术通过改变流动边界条件、压强(压力)梯度等达到控制流动的目的,主要采用调节优化几何型面来实现。这种控制是事先确定的,当实际情况偏离设计状态时,控制效果有可能达不到最佳设计状态。
主动控制是将辅助能量注入流场的流动控制方法。主动控制包括以表面相对运动、吹吸气、合成射流、激光、电子束、等离子体等[1-8]为载体的能量输入方式。其中振荡射流发生器有着体积紧凑、设计简单、节省能量、效果显著等优点,是一种很有前景的主动流动控制技术。国内外对于振荡射流发生器已经开展了较为广泛的研究。
在振荡射流发生器流动机理研究方面,Johnson等[9]采用非定常流动数值模拟方法对振荡射流发生器内部的流动结构进行了分析,发现了振荡射流发生器出口处频率与最大速度之间存在的线性关系。吴西云等[10]利用数值模拟方法研究了振荡射流发生器内部的回流特性和切换机理。姬忠礼等[11]利用粒子图像测速(PIV)技术开展了振荡射流流动控制的风洞试验研究,发现在振荡射流发生器喷嘴和尖劈之间存在着旋转方向相反的交替涡流,导致尖劈的两端形成压力扰动,正是这种干扰波与不稳定射流的相互作用诱发流动振荡。
在振荡射流发生器应用研究方面,Rathay等[12-13]首次证明了振荡射流流动控制系统在增大垂直尾翼侧向力控制效能方面的有效性。Shmilovich等[14]将32个振荡射流发生器安装在垂直尾翼迎风侧,验证了其在增强方向控制、降低排放和提高飞机性能等方面的作用。Graff等[15]进一步研究了振荡射流发生器尺寸和间距的影响,并讨论了振荡射流发生器对后掠翼横向流动的控制能力。参考文献[16]~参考文献[20]也开展了利用振荡射流发生器进行垂直尾翼流动控制研究。
本文以民用飞机连续偏转后缘机翼为流动控制对象,针对其在起降大偏度状态由于后缘流动分离导致升力损失的问题,开展了振荡射流发生器的控制机理和应用分析研究。借助非定常流动数值模拟方法,明晰了典型振荡射流发生器的流动机理,探索了其应用规律,然后通过不同构型升力特性和流场结构的对比,分析了振荡射流发生器的三维流场控制效果,旨在为将该类流动控制器进一步推广至工程应用提供技术支撑。
1振荡射流发生器模型
本文选用振荡射流发生器模型如图1所示[17]。该模型为双喉道喷管,在后喉道前的腔体两侧布置对称的反馈回路结构。该模型产生振荡射流的原理主要体现在两个方面:一是前喉道处的反馈回路扰动,即在一定的入口压力条件下,气流除在模型中心腔体形成流动外,后喉道附近的流动扰动也会通过反馈回路回传到前喉道附近,由此影响中心腔体流场形成周期交替的振荡流动。二是采用大扩张角的射流出口,即基于科恩达(Coanda)效应设定较大的出口擴张角,使在后喉道前出现偏离中心的流动通过后喉道仍能保持原来的流动方向,进而在模型出口形成周期交替的振荡流动。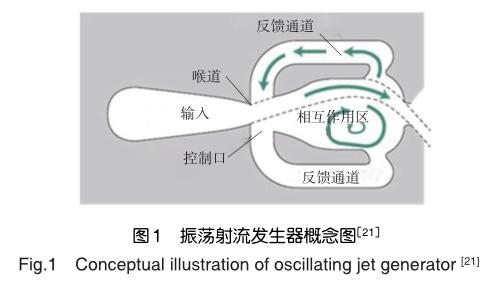
本文参照参照文献[19]完成振荡射流发生器模型设计,其中振荡射流发生器流动机理分析采用二维模型,振荡射流发生器应用研究模型是在二维模型的基础上,根据三维翼段特征尺寸缩放拉伸而成。二维模型尺寸参数见表1。
2计算方法
本文采用的振荡射流发生器参数研究的计算网格为非结构网格,二维模型计算网格如图2所示,网格量约为10万,三维模型计算网格约为500万,壁面第一层边界层高度为特征长度的10-6。流场解算控制方程为基于有限体积法的URANS方程,空间离散格式采用ROE格式,湍流模型为SA一方程模型。射流振荡发生器入口设置压力入口边界,物面采用无滑移边界条件,远场边界条件为Ma0.2,压力p∞=105Pa。物理时间步长设为0.0001s。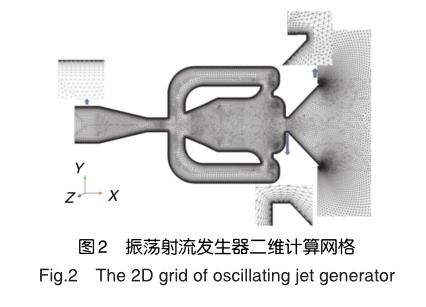
3振荡射流发生器流动机理分析
设定入口压比PR为控制参数,PR为振荡射流发生器入口压力pin与来流压力p∞的比值,即PR=pin/p∞,本文研究的压比变化范围为PR=1.4~5。
为了分析振荡射流发生器出口射流的振荡特性,在距模型出口一定距离处布置三个马赫数监控点,监控点位置如图3所示。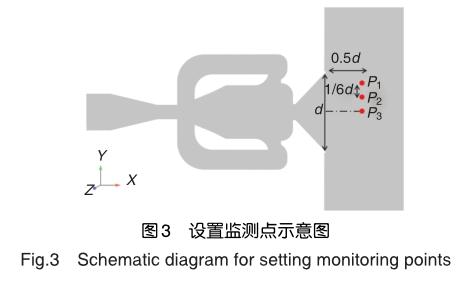
振荡射流发生器流量系数、出口最大马赫数和出口射流振荡频率随压比PR变化如图4所示。
流量系数Cμ定义为喉道处流量和来流流量的比值,即Cμ=ρthuthAth/ρ∞u∞Aref,其中ρth,uth,Ath分別为喉道处密度、速度、面积;ρ∞,u∞分别为来流密度和速度,Aref为振荡射流发生器出口面积。
可以看出,流量系数随压比增加呈线性变化规律,出口最大马赫数Ma随压比增加而增大,当压比大于2时,出口最大马赫数Ma随压比增加的幅度有所减小。出口射流振荡周期随压比增加而减小,且在压比大于2时,变化速度突然减慢,基本变化不大。
以压比为2时的流场为基准,压比为1.4时,出口流量系数减小40%,出口最大马赫数Ma减小43%,出口射流振荡周期增加36%,压比为5时,出口流量系数增加142%,出口最大马赫数Ma增加120%,出口射流振荡周期减小25%。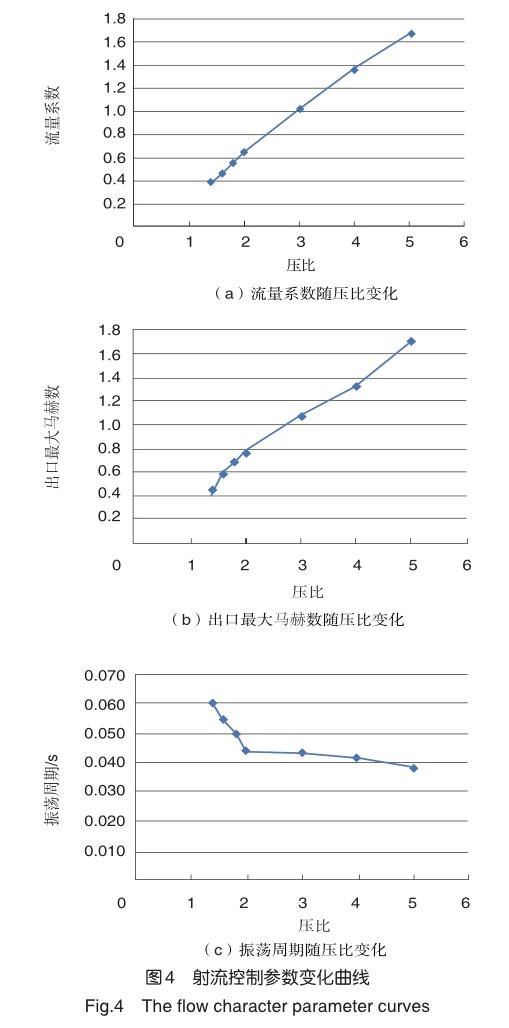
典型压比下出口监控点马赫数Ma随时间变化对比如图5所示。可以看出,压比为1.4时中心点马赫数变化连续性较好,但偏离中心点位置的最大速度区存在较大的速度波动。不同监控点的速度基本相当,表明出口射流摆动幅度较大,基本能够覆盖出口扇形区。压比为2.0时,各监控点的速度都具有较好的连续性,在高速区的速度波动明显减弱。各监控点马赫数Ma对比表明核心射流范围明显减小,但在核心射流范围之外的监控点P1的马赫数Ma也与压比为1.4时相当。压比为5.0时,不同监控点的最大马赫数Ma相差较多,但相同位置的Ma都大于小压比的情况。
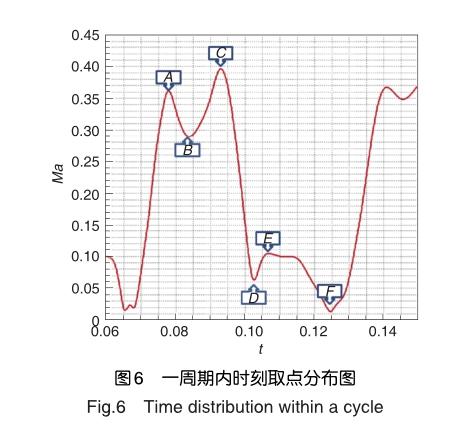
为了明确压比为1.4时监控点Ma不规则变化的原因,基于监控点1的马赫数Ma随时间变化曲线(见图5(a))选取特征时刻进行流场分析,如图6所示。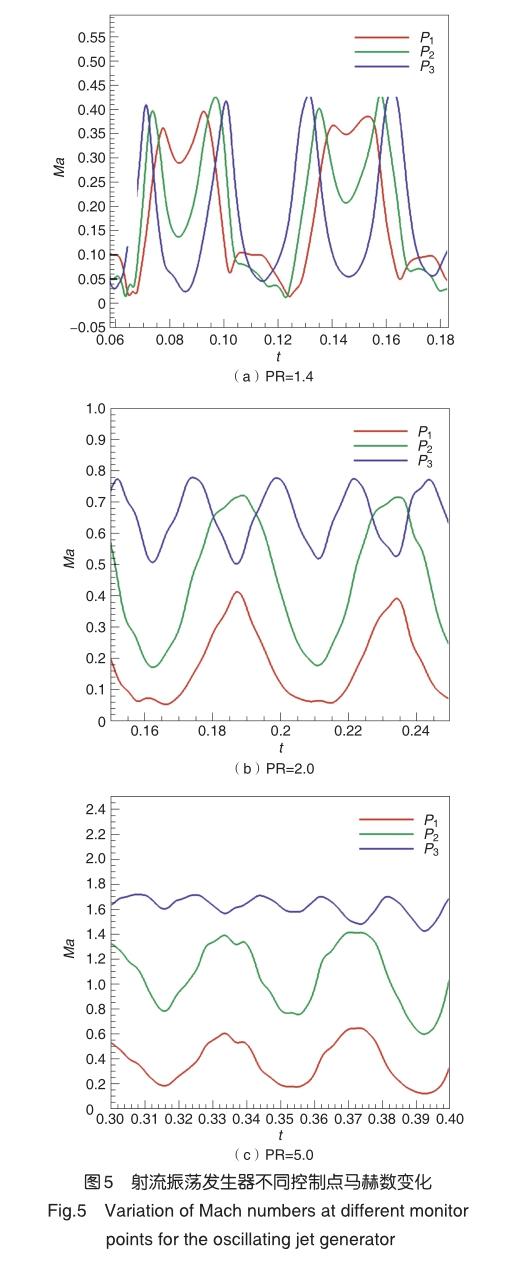
压比为1.4时的特征时刻,振荡射流发生器内部及出口马赫数Ma云图对比如图7所示。通过不同时刻的对比可以看出,出口流速较低B、D、F时刻射流出口速度的减小与反馈回路的速度增加明显相关,即反馈回路的流动减小了出口速度,导致在速度峰值区的速度不连续变化。
不同压比典型时刻流场对比如图8所示。可以看出,随着压比增大,射流核心区的长度和宽度都明显增加,尤其在压比为5时,在振荡射流发生器出口形成超声速射流。从下游流场对比来看,尽管高压比时摆动效应有所减弱,但是速度明显增加且控制范围明显增大的射流显然具有更强的流动控制能力。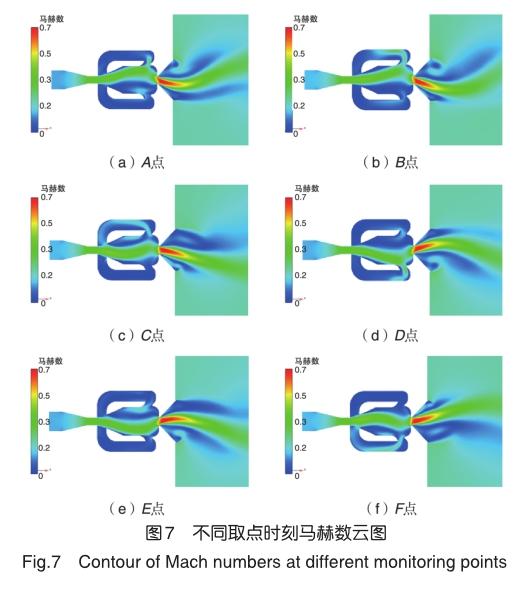
4后缘连续偏转翼段后缘分离的流动控制
基于二维流场计算开展的射流振荡发生器入口压比与流场结构的相互关系研究基础上,本节进一步探讨其在真实机翼三维复杂流场结构中的流动控制能力。为使研究简洁明了,这里选取典型民机机翼的二维翼段作为研究对象开展流动控制应用研究。
4.1后缘连续偏转翼段模型
选取某民机带有前后缘开缝襟翼的起降构型内翼翼型拉伸形成二维开缝襟翼翼段,以此为基础修改后缘开缝襟翼为连续偏转后缘襟翼,形成连续偏转后缘翼段。两种翼段模型对比如图9所示,左图为常规开缝襟翼翼段,右图为连续偏转后缘翼段。
计算来流条件为Ma0.2,迎角为0°,基于翼段弦长的雷诺数为Re=1.32×107。该典型计算状态下两种翼段流场对比如图10所示。连续偏转后缘翼段因为在后缘没有高能气流注入,存在比较明显的气流分离,将导致升力出现显著损失。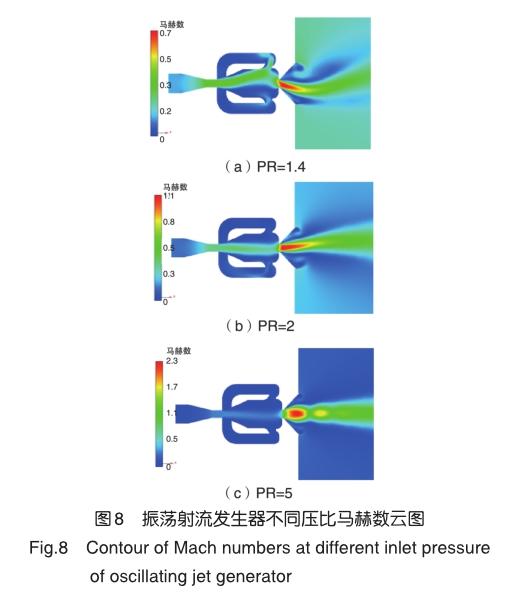
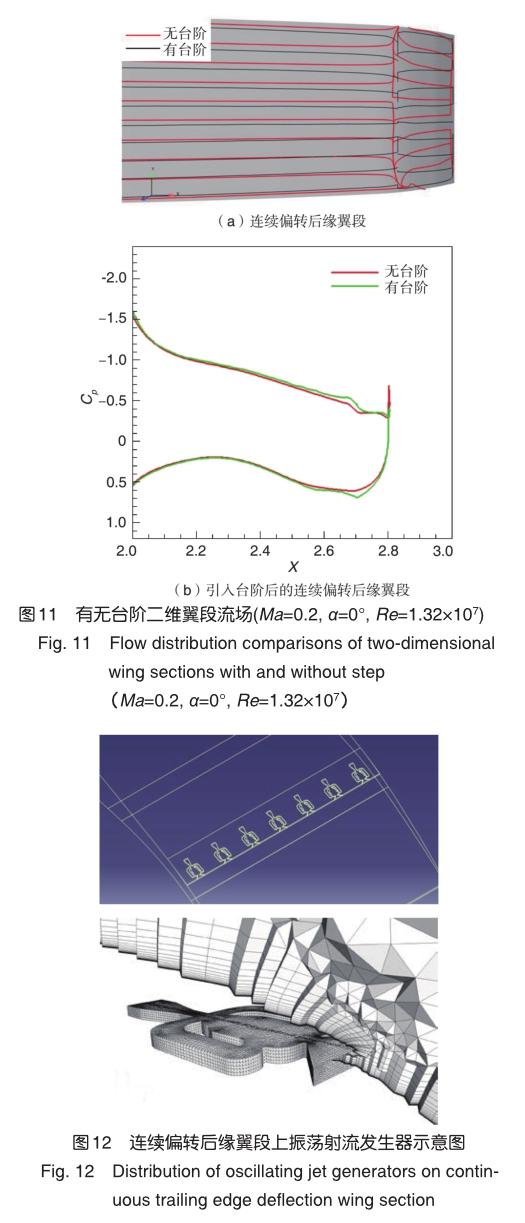
在连续偏转后缘翼段上安装振荡射流发生器会使表面形成台阶,有无台阶的翼段的表面极限流线和压力分布对比如图11所示。可以看出,台阶的存在使得后缘流动分离位置相对固定,并未对分离位置和表面压力产生明显的影响,在振荡射流发生器的应用研究中,可以忽略台阶对后缘流动的干扰。
4.2连续偏转后缘翼段的振荡射流控制
针对后缘存在明显分离的连续偏转后缘翼段,在后缘分离线附近平行布置振荡射流发生器,振荡射流发生器出口高度与开缝襟翼主翼翼段后缘厚度相同,振荡射流发生器出口宽高比为10,相邻振荡射流发生器出口中心间距与出口宽度比值为3.5,射流出口方向与当地翼面切向夹角为10°。带振荡射流发生器连续偏转后缘翼段模型如图12所示。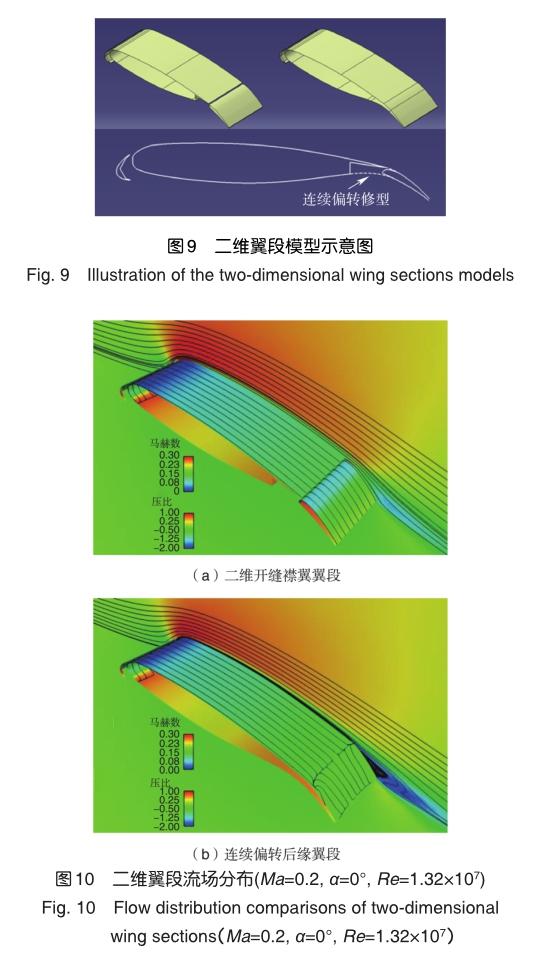
振荡射流发生器出口流量及翼段升力随振荡射流发生器入口压比变化曲线如图13所示。可以看出,在出口流量方面,当入口压比较小时,控制器出口流量增加较快,当压比大于1.6时,控制器出口流量随压比近似线性变化,但增量较低压比时略小。在翼段升力方面,当压比大于2.0时,翼段升力随入口压比近似线性增加,当压比为5.0时,翼段升力达到二维开缝襟翼升力的95%,与二维开缝襟翼翼段相当。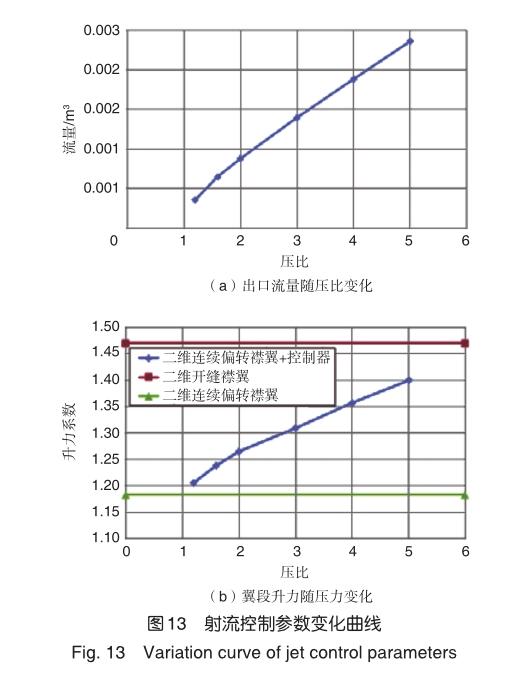
在振荡射流发生器出口布置监控点,振荡射流发生器压比为5.0时,射流控制器出口监控点马赫数随时间变化如图14所示。可以看出,振荡射流发生器出口射流呈周期性摆动,射流出口最大马赫数为0.98,最大偏转位置射流最大马赫数为0.93,最小马赫数为0.6,射流摆动周期为0.03s。
Liu Ying*,Li Chunpeng,Zhang Tiejun,Qian Zhansen
Aero Science Key Lab of High Reynolds Aerodynamic Force at High Speed,AVIC Aerodynamics Research Institute,Shenyang 110134,China
Abstract: In order to solve the problem of obvious flow separation leading to lift loss on the trailing edge of continuous deflection wing of civil aircraft under take-off and landing conditions, an oscillating jet generator is selected to study the flow control mechanism and application. Firstly, based on the two-dimensional flow field, the change rules of the flow field structure inside and outside the controller are analyzed by giving different inlet pressures. And then, a typical civil aircraft wing 2D wing section is selected. The conventional slotted trailing edge flaps and the continuous deflection of the trailing edge with and without the controller are used to compare the lift characteristics and the flow field structure, and the flow control ability of the oscillating jet generator in the three-dimensional flow field is analyzed. The results show that the oscillating jet generator can effectively eliminate the trailing edge airfoil separation by outputting a high-speed jet that periodically swings, so that the lift of the continuously deflected trailing edge reaches a level equivalent to that of the slotted flap.
Key Words: oscillating jet generator; trailing edge separation; flow control
