基于Vi Be的车流量统计算法
2020-02-04 16:05费维倩程苗
中国集体经济 2020年2期
关键词:算法
费维倩 程苗
摘要:交通统计作为智能交通系统的关键技术之一,已逐渐成为研究的热点。本课题提出了一种车流量统计算法来确定车辆是否进入观察区域,从而实现交通流量统计。该研究的结果基于视频的快速视频流量统计算法。YUV色彩空间符合人类视觉习惯,用于消除阴影对交通统计的干扰。以解决光照变化对系统的影响。在道路上打开虚拟检测区域,并且使用Vi Be表明,上述算法可以有效地计算交通量,可以用于交通引导,管理提供有效分析处理数据。
关键词:车流量统计;Vi Be 算法
随着中国社会经济的迅猛发展,中国城市的交通量突然增加,智能交通系统的重要性也日益凸显。交通监控包括车速监控,交通量和路况监控,车辆异常行驶报警,车型判断,车牌识别等。其中,流量统计可以对多个车道进行车辆计数和拥堵分析,为交通管理员提供大量有效信息。实现智能道路调度,减少拥堵,提高道路资源利用率。
目前用于目标检测的学术方法主要分为以下三类:帧间差分法,背景减法,光流法。
Vi Be(视觉背景提取器)算法,视觉背景提取算法。具有其高实时性和稳健性,因此,本文将其引入基于车辆流量统计技术视频分析的交通流量检测和统计研究。
Vibe算法首先将随机选择机制和邻域传播机制应用于背景模型的建立和更新。此样本集由过去位置及其邻居位置像素值组成,然后将此处的像素值与此样本集中的像素进行比较,从而来判断像素是否属于背景。背景模型随机再次更新。
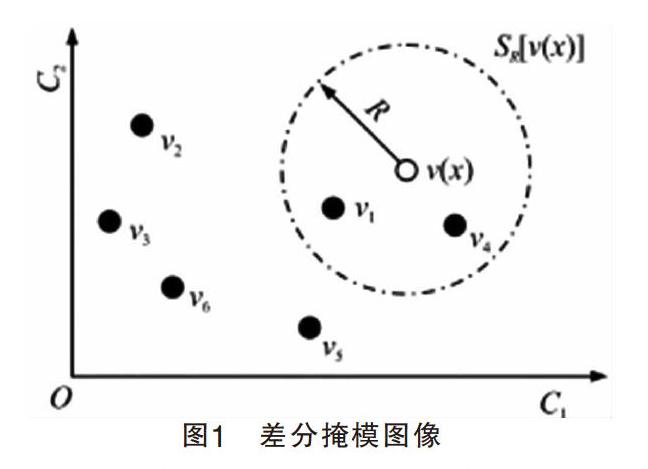
Vibe算法于2011年提出。本文选择基于Vibe模型的目标提取方法。Vibe 模型步骤如下:1.首先根据像素邻域的像素值,即当前像素,定义背景模板8 邻域模型中,随机抽取 1 个值作为背景模板元素,并重复 N 次。在当前像素点xV(V)处设置颜色空间值,像素背景模板值为: M(x)={ V}1 V V3 V4 VN1. 2.分析比较当前像素与背景模板中每个元素之间的距离,如圖1所示。用像素点 V(x)中心和 R作为半径计数圆包含背景模板 M(x)的数量,当该值小于设定阈值时,将其确定为前景,并且当其大于阈值时,将其确定为背景。图 1 Vibe 分类模型。3.背景模型更新。对于被分类为背景的像素 V(x),像素 V(x)以概率 P(t)随机地替换背景模板 M(x)中的像素值,样本更新公式如下:P(t)=1N
虽然传统的Vibe算法运行良好,但它会为图像中快速移动的目标产生重影,这可能导致目标的误提取。本文结合帧差法改进问题,提高检测精度。1.首先初始化并建立背景模板以及前景维持矩阵F (x y);2.对视频序列进行差分建模并进行二值化处理;3.运用前文方法,根据当前像素点 R 包含背景样本的个数是否在阈值范围内,判断该点属于背景还是前景。若判断为背景则执行步骤5.,若判断为前景,则根据帧差法模型进一步判断当前模型是鬼影还是真实前景,跳转到步骤4.;4.根据差分掩模图像继续判断当前点是重影还是前景,即将帧差法获得的背景图像与Vibe背景图像进行比较,获取新的背景图像。若超过则认为是鬼影点;5.根据传统 Vibe 算法的更新步骤更新背景模板。
由于在RGB空间中处理原始Vi Be算法,虽然可以生成阴影,但是阴影不能被消除,从而影响流量统计的准确性。这里的车辆检测算法需要检测和抑制由YUV空间中的车辆移动产生的阴影。另外,阴影区域中的像素的色度几乎等于背景像素的色度。由于移动物体和阴影的色度相似,但亮度值的差异较大,请使用此属性来检测和移除阴影像素。
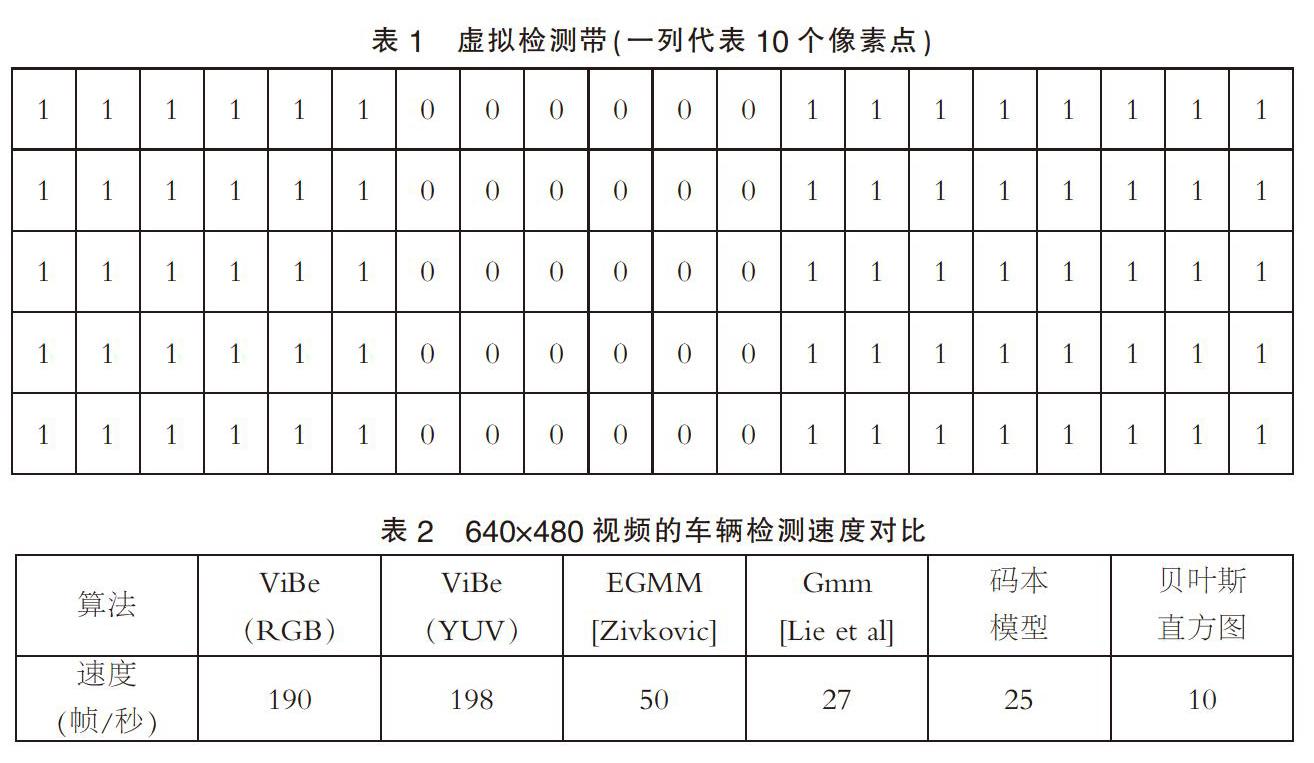
本课题中的流量统计算法中通过更新时间和虚拟检测带组相结合的方式。使用虚拟检测区域的检测方法是在每个信道上手动设置虚拟频带。如果设置多个虚拟检测波段那么就需要多个通道,因为当汽车通过该虚拟波段时,虚拟线路上的像素更新次数将发生明显变化,因此流量统计信息基于此更改。同时,是否存在车辆访问检测区域是由更新次数的改变来进行指示的。更新的数量将基本保持不变是由于在正常情况下,没有车辆进入。以此来作为虚拟检测带的补充。本文使用5行像素的虚拟磁带,如表1所示,假设车辆宽度为60像素。在表中,1表示需要更新作为背景,0表示更新是前景目标,即车辆。如果在由5行像素组成的虚拟带中存在前景像素,不需要更新的像素和连接的像素满足一定数量,也就是说,如果车辆进入,则车辆统计数据可以增加一个。直至虚拟检测带上不再有 0 为止。如果虚拟波段全部为1则没有车辆通过。实验结果如表2所示。
如图1所示,速度和准确度更好地结合在一起。本方法简单有效, 误差较小。
算法整流程:1.在各个车道上设置虚拟检测带。2.取视频序列的第一帧以初始化样本模型,并取相应位置的八个邻域来初始化模型,取N次。3.对于新的帧图像,将 X位置的像素与样本模型中的对应位置进行比较,差值小于某个范围 R,并且满足 N个样本中的 W,即,将新的 X帧视为背景并且需要更新。否则为前景。4.背景更新,包括像素和帧级更新。5.阴影去除与后处理。
现在常用的流量统计算法具有基于区域标记和虚拟检测线的统计方法。后者在道路上设置虚拟检测线,然后确定是否存在通过检测线的前景目标。本文提出使用多个虚拟检测带和连接域来组合流量统计。
本课题提出了一种基于Vi Be的快速流量检测算法。在使用 YUV空间进行处理和消除阴影效果时,还可以消除光照变化带来的不利影响,此外,此算法还取决于更新的数量,以及确定车辆访问观察窗口,并进行实时交通流量统计通过更新次数和虚拟检测区域的方法。通过实验结果表明此方法简单而且有效果,同时又具有实时性。因此,本文提出的Vi Be具有一定的车辆交通统计实用性。
参考文献:
[1]李香平,杨兆选.基于虚拟线的视频交通检测新算法[J].电子测量与仪器学报,2005(04).
[2]齐美彬,杨爱丽,蒋建国,等.一种基于改进码本的车辆检测与跟踪方法[J].中国图象图形学报,2011(03).
[3]杜宇人,周爱军.一种基于视频图像的运动车辆跟踪方法[J].电子测量与仪器学报,2009(03).
[4]檀甲甲,张建秋.实时采集道路车流量信息的视频新方法[J].仪器仪表学报,2007(01).
[5]唐佳林,李熙莹,罗东华,等.一种基于帧差法的夜间车辆检测方法[J].计算机测量与控制,2008(12).
[6]於正强,潘赟,宦若虹.一种结合帧差法和混合高斯的运动检测算法[J].计算机应用与软件,2015(04).
[7]胡宏宇.混合交通中运动目标特征表达与分类算法的研究[D].吉林大学,2007.
*基金项目:基于无人机vibe图像处理车流量统计算法(编号,201810959038)。
(作者单位:安徽三联学院)
猜你喜欢
海南金融(2022年3期)2022-04-14
湖北教育·教育教学(2022年3期)2022-03-28
语数外学习·高中版中旬(2021年12期)2021-03-09
中学生数理化·高三版(2020年11期)2020-12-30
中国计算机报(2020年31期)2020-09-08
阅读与作文(英语初中版)(2019年8期)2019-08-27
中学生数理化·高一版(2019年1期)2019-06-26
科学导报(2019年78期)2019-01-07
中学生数理化·高一版(2017年1期)2017-04-25
中学生数理化·高一版(2017年1期)2017-04-25