
基于雷达的列车直轨运行前方障碍物检测方法研究
2020-02-13 02:08郭双全董昱
铁道科学与工程学报 2020年1期
郭双全,董昱
基于雷达的列车直轨运行前方障碍物检测方法研究
郭双全,董昱
(兰州交通大学 自动化与电气工程学院,甘肃 兰州 730070)
针对视觉传感器检测列车运行前方障碍物时存在环境适应能力差及对距离判别能力弱的缺陷,提出一种基于雷达的列车直轨运行前方障碍物检测判别方法。通过最小二乘法进行雷达测量数据误差矫正得到较准确的目标位置信息。结合铁路机车车辆限界、雷达方位角及雷达测量量程,构建检测区模型。将预处理后的目标点位置信息代入构建的检测区模型中进行障碍物检测判别。现场测试结果显示,利用该方法检测不仅具有较高的准确性,而且克服了环境因素的影响。
列车前方环境理解;最小二乘法;检测区域模型;障碍物检测

IEC62290标准按照列车运行的所需操作,自动化程度不同划分自动化系统等级:GOA1到GOA4。列车在GOA1和GOA2等级运行时,监控轨道避免列车与轨道上的维修人员碰撞,是由机车司机目视前方行车环境,当发现前方行车环境中有维修人员时,司机鸣笛提示前方人员起到预警作用,同时对列车实施制动,将碰撞事故尽可能的降低。而随着列车的运行速度的提高,仅仅依靠司机难以实现对行车环境的实时可靠监测且司机目视监测距离相对较短容易发生碰撞维修人员事故。故需利用自动化监测设备辅助司机实行监测感知前方运行环境,即逐渐实现列车的全自动驾驶,达到GOA3和GOA4的要求。随着轨道交通全自动驾驶信号系统的研发和铁路视觉和雷达监测技术的应用,实现行车前方铁路限界环境的智能化监测已然成为研究的热点课题,具有重要的现实意义[1-4]。近几年,国内外学者提出采用视觉传感器和雷达传感器构建列车环境感知系统,实现对行车环境的实时可靠检测。史红梅等[5]基于机器视觉与嵌入式技术设计了异物侵限自动检测系统。Ruder等[6]构建了一个基于3台摄像机的机车前方轨道障碍物检测系统,实现对障碍物目标跟踪与检测。Fonseca等[7]以车载前视视觉传感器为视角,提出了采用基于Hough变换的方法来检测铁路轨道线区域并在此区域内扫描搜索可能的障碍物目标。Berg等[8]采用单目热敏相机进行障碍物检测。超木日力格[9]提出了通过特征匹配和光流法的机车司机视野扩展系统,对路轨障碍物目标检测。董昱等[10]采用单目摄像机获取铁路线路图片并提取轨道线的Hu不变矩特征实现铁路轨道识别检测。王前选等[11]推导出用于钢轨识别检测的Bresenham直线算法,提出钢轨直线检测实现方法。庞博[12]设计了一种随车激光雷达轨道障碍物探测系统,根据反馈信号判断行车路线是否存在障碍物。虽然视觉传感器能够获取目标详细的属性信息,但其对于获取目标的位置信息以及环境适应能力都相对较差(如:当碰到暴雨、雪以及雾等不佳的天气环境时,判断效果会大打折扣)。针对司机视觉、巡道工和单点监控防护的方式及视觉传感器目标检测跟踪的不足,本文采用雷达传感器进行铁路异物侵限检测研究,其既可以解决司机视觉、巡道工和单点监控防护的方式带来的实时性不足的问题,也可以解决视觉传感器目标检测跟踪获取目标位置不准确及环境适应能力差的问题。障碍物检测算法架构如图1所示。首先,获取目标点位置信息,并对其进行预处理消除系统误差,得到较精确的目标点位置信息;其次,根据铁路限界轮廓结合雷达参数信息构建检测区;最后,将经矫正后的目标点位置代入构建的检测区模型中进行障碍物检测 判别。
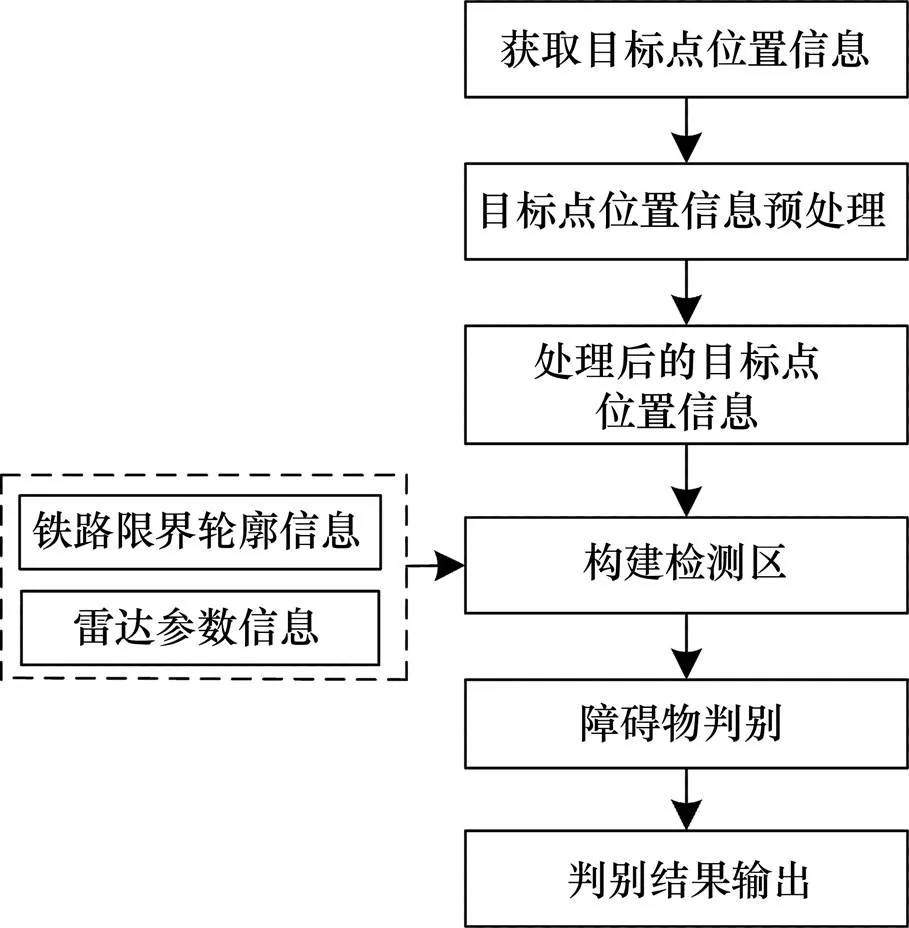
图1 障碍物检测算法架构
1 研究问题描述及雷达选型
本研究的主要目的是分析雷达探测到的目标位置是否处在机车车辆限界内方。若处在机车车辆限界内方,则对行车构成威胁,将其判别为障碍物。否则,对行车无影响,将其判别为非障碍物。
如图2所示,雷达安装于列车头部正中心,周期性的发射探测波,将反射回的波形信息在雷达系统中进行信号处理分析,解析出前方目标的位置信息,用于本文障碍物检测研究。
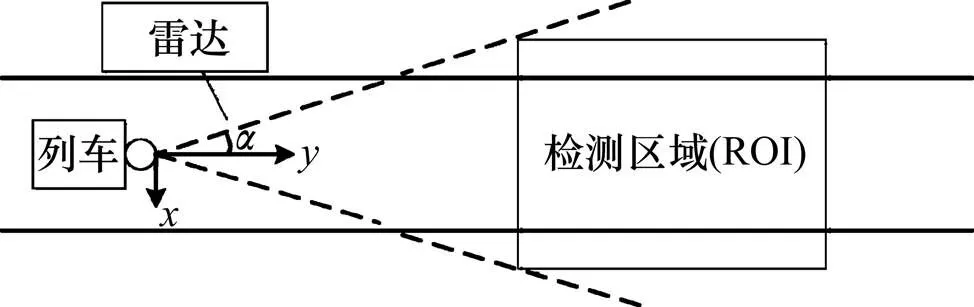
图2 雷达障碍物检测示意图
根据功能需求选取适当的雷达设备,本课题研究中选取的雷达型号为FD4—1000CJ10,该雷达环境适应性强,雷达性能不受光照、灰尘、雨雪、雾霾等恶劣环境影响。主要的电气参数如表1所示。
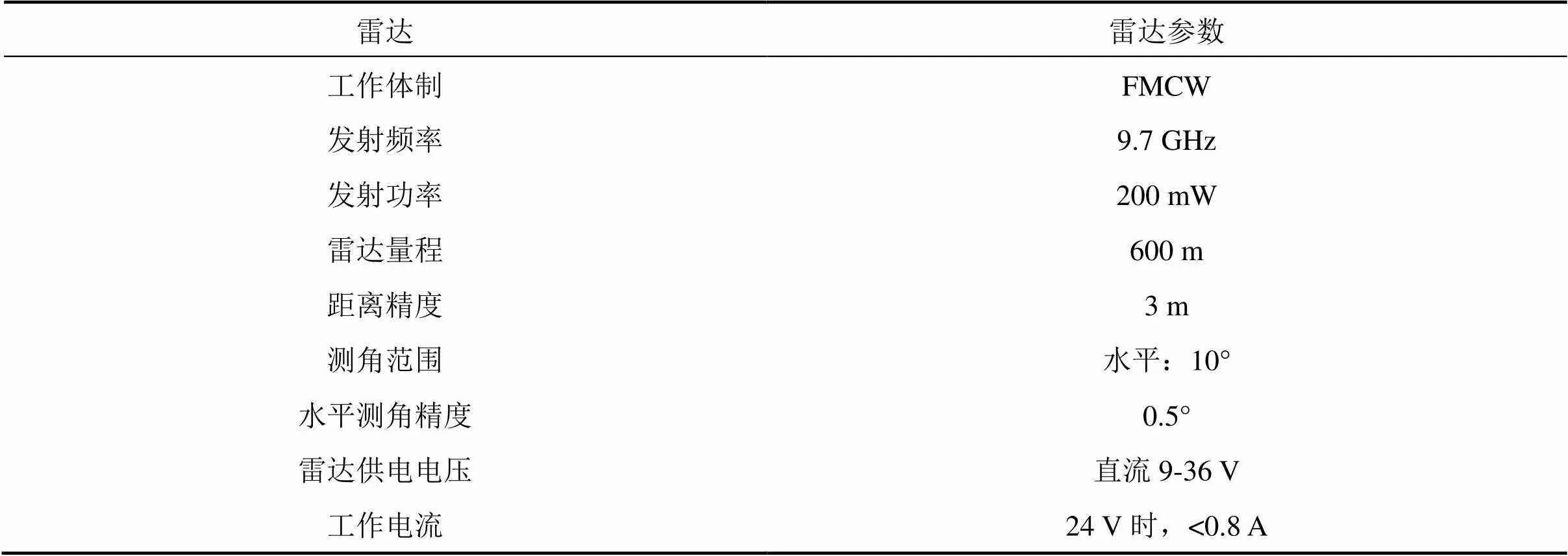
表1 雷达主要电气参数
2 雷达测量数据预处理
雷达测量数据预处理环节的目的是为了消除雷达测量数据的系统误差[13-14],提高雷达测量数据的质量,使后续目标侵限判断更准确。
2.1 测量点函数拟合
采用最小二乘法对测量点进行曲线拟合,即可得测量点函数,具体拟合步骤如下。
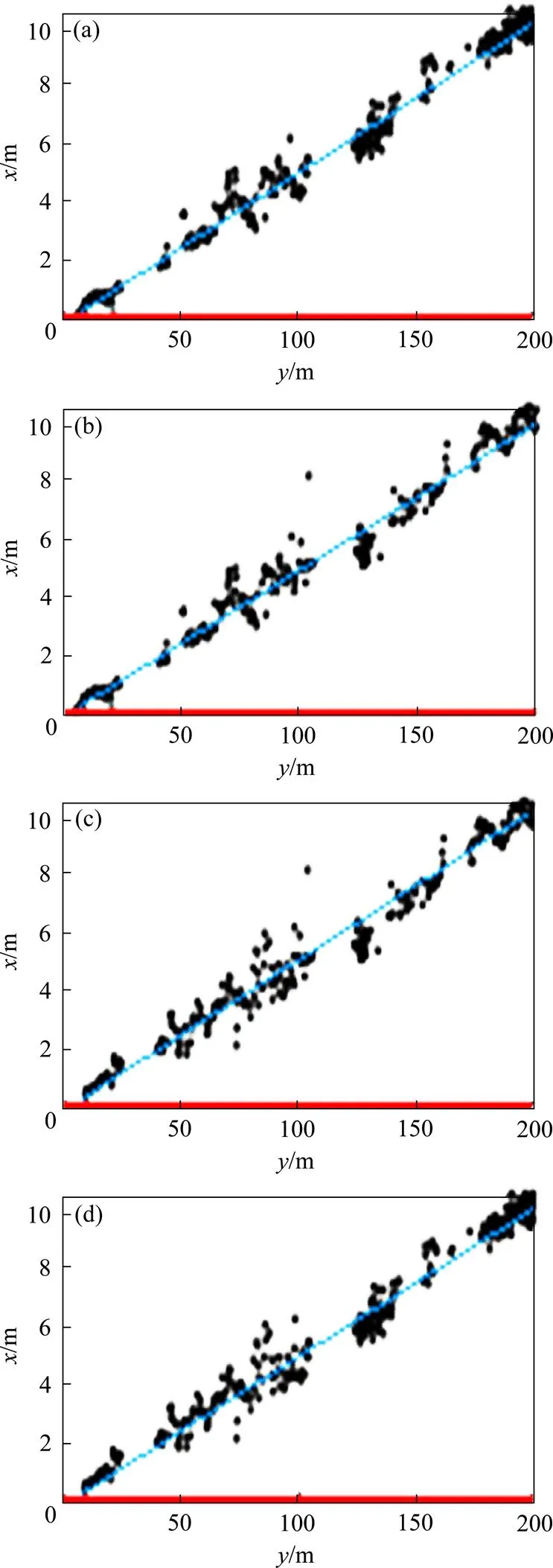
步骤1:确定拟合曲线的形式。将雷达获取的测量点(x,y)用Matlab绘制成散点图,如图3所示。由图3可知,4次测量结果的测量点均位于一条直线的附近,故可以用线性函数(直线)来拟合测量点数据,即令
式中:和为待定常数。
步骤2:构造目标函数。选取最佳的使偏差平方和最小构造相应的目标函数,即
(a) 第1次测量;(b) 第2次测量;(c) 第3次测量;(d) 第4次测量
图3 测量点散点图
Fig. 3 Measurement point scatter plot
步骤3:建立方程组。对目标函数求未知参数的一阶偏导并令其偏导为0构造方程组,将其写成矩阵形式即为法方程组,即
式中:为拟合点数。
步骤4:求解函数表达式。对式(3)方程组求解即可得和的值,将求得的和的值代入式(1)中,即可得拟合函数表达式,如式(4)所示。
2.2 系统误差矫正
将雷达固定,让目标在轴方向的距离保持不变,使其仅沿轴方向运动,分析轴的测量值随轴变化的函数关系(注:由于检测边界在轴向的变化比较小,故对由轴引起的误差未做研究)。其具体过程如下。
步骤1:测量点函数绘制。用3.1所提方法对多次测量结果均拟合出测量点函数表达式。
步骤2:误差函数求解。用步骤一中获取的测量点函数减去目标实际运动的轨迹函数获取误差函数,即
步骤3:实际误差函数。对获取的误差函数的系数求取均值,即可获得实际误差函数[14],即
2.3 实际误差函数求解
将雷达固定,让目标沿着轴方向运动,即此时实际目标运动轨迹函数为=0。进行了4次测量实验,分别计算各自的误差函数表达式。
目标运动的实际轨迹和雷达测量点拟合轨迹仿真如图4所示,4(a),4(b),4(c)和4(d)分别为第1次至第4次的仿真结果图。其中,虚线条代表目标运动实际轨迹函数,横坐标粗线条代表测量点轨迹函数。根据式(1)~(4)结合测量点数据可求得各自的测量点函数表达式分别如表2所示。
(a) 第1次测量;(b) 第2次测量;

表2 测量点函数表达式
已知各次测量点函数表达式,又已知实际目标运动轨迹函数表达式,则可根据式(6)计算获取单次误差函数表达式,如表3所示。

表3 单次误差函数表达式
由表3已知单次误差函数表达式,则可根据式(7)计算获取实际误差函数表达式,如式(8)所示,其实际误差函数如图5所示。

2.4 预处理后雷达数据误差估计
利用雷达随机测量个数据点,并记录各个数据点的实际位置点坐标为(x,y)和雷达测量点位置坐标为(x,y)。具体估计过程如下。
步骤1:雷达测量点数据预处理。将获取的雷达测量点数据减去雷达在该点的系统误差值获得预处理后的雷达数据。即如式(9)所示。
式中:(x,y)为雷达测量点数据经预处理后的位置点坐标;Δx代表雷达测量点在该点的x轴向距离误差。
步骤2:误差范围及平均误差估计分析。利用距离公式计算雷达数据点位置坐标(x,y)与对应的实际位置点坐标(x,y)之间的距离和平均距离即可求得误差范围和平均误差。其中误差范围求解如式(10),平均误差求解如式(13)。
式中:min为误差范围的下限;max为误差范围的上限;为误差变量。min和max计算如式(11)和 式(12)。


步骤3:误差范围及平均误差估计。对随机测量的100个数据点首先代入式(9)中进行预处理操作,然后再将预处理后的雷达测量数据和数据点的实际位置代入式(10)~(13)中进行误差范围及平均误差估计,经估计分析的预处理后雷达的误差范围大概为[0 m,0.2 m]。平均误差值大约为0.11 m。
通过误差估计分析可知,将雷达原始目标数据通过预处理环节后,有效的消除了由于雷达精度及设备缺陷带来的系统误差,提高了障碍物检测的判别准确性。
3 雷达障碍物检测
3.1 检测区模型构建
铁路机车车辆上部限界基本轮廓如图6所示,经限界基本轮廓可知[15],列车安全运行的限界横向轮廓值应至少为机车车辆限界基本轮廓在横向的最宽值3.4 m外加列车信号装置限界轮廓值0.2 m,即列车安全运行的限界横向轮廓值为3.6 m。
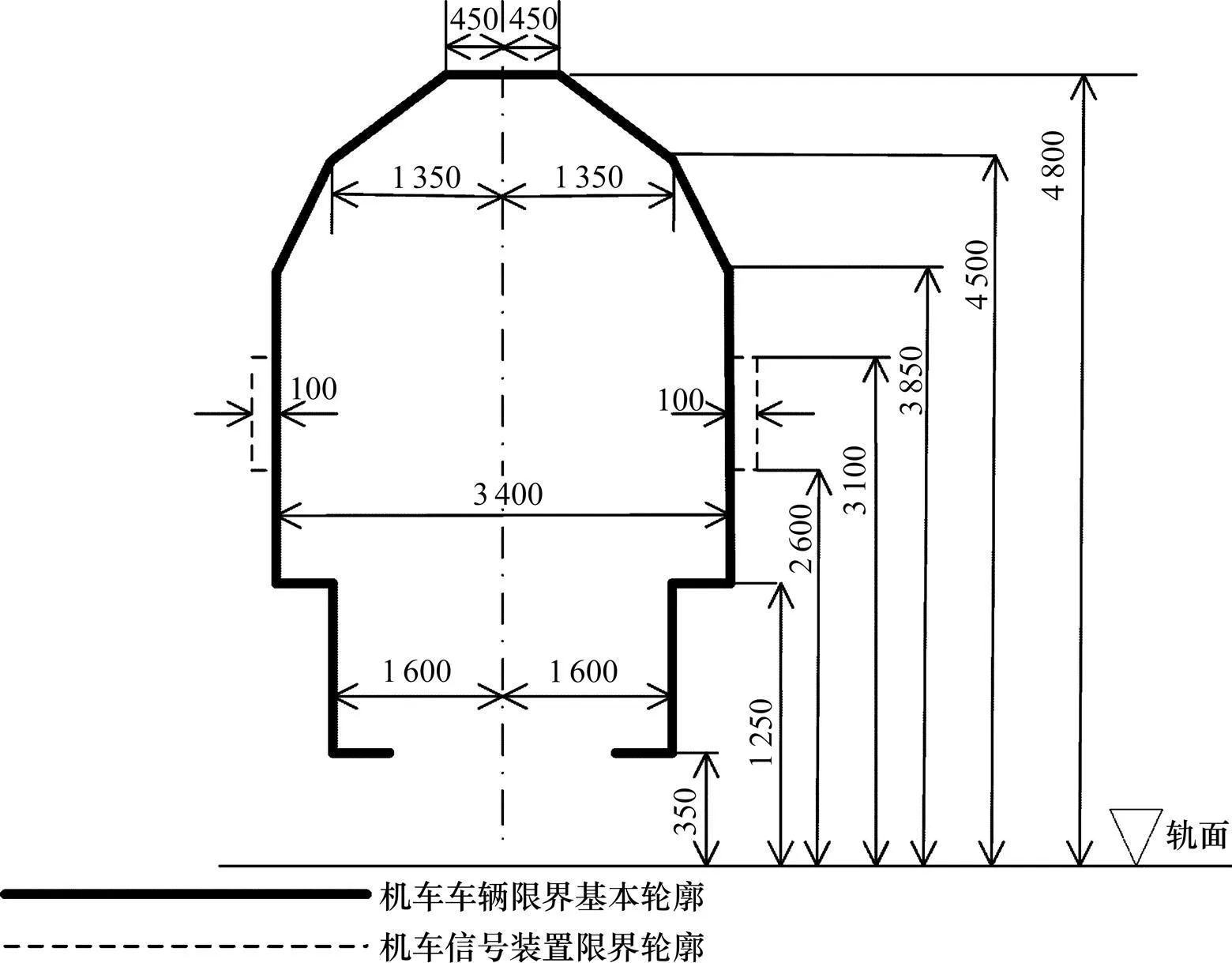
图6 机车车辆上部限界图
结合雷达参数信息、列车安全运行的横向轮廓值及预处理后雷达数据的误差范围构建检测区模型,其检测区边界参数设置如图7所示。
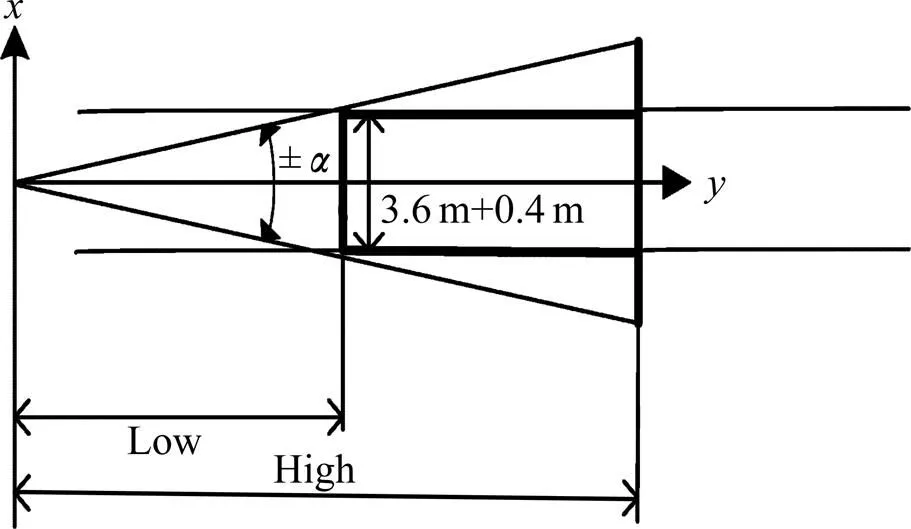
图7 检测区构建示意图
图7中,坐标原点对应雷达的发射中心,轴为雷达的发射中轴线。3.6 m为列车安全运行的横向轮廓值,0.4 m为误差补偿值。Low值为检测区近边界距离雷达中心点的距离;High值为检测区远边界距离雷达中心的距离;为雷达方位角。其中,Low值由雷达方位角决定,具体计算公式如式(9)所示。High值由雷达的量程决定。根据表1中雷达参数信息并将其值代入式(9)中可得Low值大约为11 m,而High根据雷达测量量程信息知其值为 600 m。
根据以上分析可以构建相应的雷达检测区模型如式(15)所示[16]。

3.2 障碍物检测判别
雷达获取到目标信息后首先要经过预处理环节进行系统误差的矫正,消除雷达测量数据的系统误差。
设雷达测量原始点坐标为(x,y),经式(9)预处理后得到的雷达目标点的位置坐标为(x,y) 。将经预处理之后获取的目标点位置坐标(x,y)代入到检测区模型中进行判决,判别是否满足检测区模型,若满足则判别其为障碍物。即如式(16)所示。

4 仿真实验与结果分析
在本次实验中,共选取3个场景中测得的500帧雷达测试数据来验证所提方法的合理性及检测准确性。其3个场景分别为:白天无雾、白天有雾及夜间。
4.1 仿真验证实例
FD4—1000CJ10型雷达一次最多可以测量60个目标位置信息。选取一帧雷达测试数据进行仿真展示。所选雷达测试数据如下表4所示(注:由于现场测试距离限定,故仅分析<200 m的目标点,满足此条件的目标点共有5个)。
表4 雷达测试数据展示
对表4中的雷达测试数据利用式(8)和式(9)消除误差,得到处理后的雷达检测数据,如表5所示。
表5 处理后的雷达检测数据
将表5中的雷达检测数据代入式(16)中进行障碍物检测判别,其仿真结果如图8所示。并在Matlab界面中提示Traget4为障碍物。
图8 障碍物检测判别仿真
4.2 性能评价
通过检测正确率及误检率对本文提出的检测方法进行评价,具体见表6。

表6 本文检测方法评价指标
由表6可知,本文提出的障碍物检测方法当在恶劣行车环境下时检测正确率为88.33%,而当在正常环境中行驶时检测正确率超过了90%。而采用文献[10]当在光照条件良好时直轨障碍物的识别率为89.64%,当在光照条件较差时识别率严重下降。由此可以看出,本文方法具有良好的环境适应能力和检测准确率。
5 结论
1) 提出基于雷达的直道列车运行前方障碍物检测,克服了机器视觉检测环境适应能力差及纵向距离判别能力弱两方面的问题。
2) 利用最小二乘法对雷达数据进行预处理,消除了雷达系统误差,提高了障碍物检测判别的准确度。
3) 通过Matlab仿真验证,结果显示,本文所提障碍物检测方法是合理的且具有良好的检测性能,具有较高的理论价值和实际应用前景。
[1] 路向阳, 吕浩炯, 廖云, 等. 城市轨道交通全自动驾驶系统关键装备技术综述[J]. 机车电传动, 2018(2): 1-6. LU Xlangyang, LYU Haojlong, LIAO Yun, et al. A review of key apparatus of urban rail transit full automatic operation system[J]. Electric Drive for Locomotive, 2018(2): 1-6.
[2] Punekar N S, Raut A A. Improving railway safety with obstacle detection and tracking system using GPS-GSM model[J]. International Journal of Science & Engineering Research, 2013, 4(8): 288-292.
[3] 肖衍, 苏立勇. 轨道交通全自动驾驶系统集成技术研究[J]. 中国铁路, 2015(5): 109-113. XIAO Yan, SU Liyong. Research on the integrated technology of the automatic driving system for rail transit[ [J]. Chinese Railways, 2015(5): 109-113.
[4] Kazanskiy N L, Popov S B. Integrated design technology for computer vision systems in railway transportation[J]. Pattern Recognition and Image Analysis, 2015, 25(2): 215-219.
[5] 史红梅, 柴华, 王尧, 等. 基于目标识别与跟踪的嵌入式铁路异物侵限检测算法研究[J]. 铁道学报, 2015, 37(7): 58-65. SHI Hongmei, CHAI Hua, WANG Yao, et al. Study on railway embedded detection algorithm for railway intrusion based on object recognition and tracking[J]. Journal of the China Railway Society, 2015, 37(7): 58- 65.
[6] Ruder M, Moler N, Faruque A. An obstacle detection system for automated trains[C]// Proceedings Intelligent Vehicles Symposium IEEE, 2003: 180-185.
[7] Fonseca Rodriguez L A, Uribe J A, Vargas Bonilla J F. Obstacle detection over rails using hough transform[C]// 2012 XVII Symposium of Image, Signal Processing, and Artificial Vision (STSIVA), September 12-14, 2012. Medellin, Antioquia, Colombia. New York, USA: IEEE, 2012.
[8] Berg A, Öfjäll K, Ahlberg J, et al. Detecting rails and obstacles using a train-mounted thermal camera[M]// Cham: Springer International Press, 2015: 492-503.
[9] 超木日力格. 机车司机视野扩展系统及路轨障碍物检测的研究[D]. 北京: 北京交通大学, 2012. CHAO Murilige. Locomotive Driver’s vision expansion system and roadblock detection algorithm[D]. Beijing: Beijing Jiaotong University, 2012.
[10] 董昱, 郭碧. 基于Hu不变矩特征的铁路轨道识别检测算法[J]. 铁道学报, 2018, 40(10): 64-70. DONG Yu, GUO Bi. Railway track detection algorithm based on Hu invariant moment feature[J]. Journal of the China Railway Society, 2018, 40(10): 64-70.
[11] 王前选, 梁习锋, 刘应龙, 等. 铁路钢轨视觉识别检测方法[J]. 中南大学学报(自然科学版), 2014, 45(7): 2496- 502. WANG Qianxuan, LIANG Xifeng, LIU Yinglong, et al. Railway rail identification detection method using machine vision[J]. Journal of Central South University (Science and Technology), 2014, 45(7): 2496-2502.
[12] 庞博. 高速机车轨道障碍物激光扫描探测系统技术研究[D]. 天津: 天津大学, 2010: 9-43. PANG Bo. Research on laser scanning system and technology for obstacle detection of high-speed railway[D]. Tianjin: Tianjin University, 2010: 9-43.
[13] 董大钧. 误差分析与数据处理[M]. 北京: 清华大学出版社, 2013: 69-83. DONG Dajun. Analysis and date processing[M]. Beijing: Tsinghua University Press, 2013: 69-83.
[14] 李鹏飞, 郝宇, 费华平, 等. 基于多直线融合的雷达误差标定算法研究[J]. 雷达科学与技术, 2017, 15(6): 682-686. LI Pengfei, HAO Yu, FEI Huaping, et al. Radar calibration error correction algorithm based on segment track linear fitting[J]. Radar Science and Technology, 2017, 15(6): 682-686.
[15] 王瑞峰. 铁路信号运营基础[M]. 北京: 中国铁道出版社, 2008: 11-14. WANG Ruifeng. Railway signal operation foundation [M]. Beijing: China Railway Press, 2008: 11-14.
[16] 黄伟. 基于雷达和机器视觉的车辆前方障碍物检测系统设计与实现[D]. 武汉: 武汉理工大学, 2010. HUANG Wei. Design and implementation of vehicle obstacle ahead detection system based on radar and computer vision[D]. Wuhan: Wuhan University of Technology, 2010.
Research on detection method of obstacle in front of straight track operation of train based on radar
GUO Shuangquan, DONG Yu
(College of Automation and Electrical Engineering, Lanzhou Jiaotong University, Lanzhou 730070, China)
To address the problem of poor environmental adaptability and weak distance discrimination in the detection for obstacle based on visual sensors,aradar-based method for detecting obstacles in front of straight track operation of trains was proposed. Firstly,the method performed the error correction of the radar measurement data by the least squares method to obtain more accurate target position information. Secondly,combined with the railway locomotive vehicle limit, radar azimuth and radar measurement range, the detection zone model was constructed. Finally, the pre-processed target point position information was substituted into the constructed detection area model for obstacle detection and discrimination. The field test results show that the method is not only highly accurate but also overcomes the influence of environmental factors.
environmental understanding of the front of the train; least squares; detection area model; obstacle detection
10.19713/j.cnki.43-1423/u.T20190293
U213.2
A
1672 - 7029(2020)01 - 0224 - 08
2019-04-12
国家自然科学基金资助项目(61763023)
董昱(1962-),男,河南邓州人,教授,从事铁路交通信息工程及控制研究;E-mail:1761853586@qq.com
(编辑 蒋学东)
猜你喜欢
铁道标准设计(2022年10期)2022-10-10
航空学报(2022年5期)2022-07-04
交通科技与管理(2021年5期)2021-06-13
动漫界·幼教365(中班)(2020年3期)2020-04-20
模具制造(2019年10期)2020-01-06
科学导报·科学工程与电力(2019年5期)2019-10-20
创新作文(1-2年级)(2019年4期)2019-10-15
好孩子画报(2019年10期)2019-01-10
海峡科技与产业(2017年3期)2017-04-13
山东工业技术(2016年14期)2016-07-05
