新型长时热流测量装置的研制及应用
2020-02-27 03:44刘国仟李宇刘宇飞徐晓亮崔占中周禹
装备环境工程 2020年1期
刘国仟,李宇,刘宇飞,徐晓亮, 崔占中,周禹
(中国运载火箭技术研究院 空间物理重点实验室,北京 100076)
在航天、航空、能源及国民经济各领域中,热流测量都起着重要的作用。尤其在国防军工领域,随着临近空间飞行器等重点型号的发展,飞行器的飞行马赫数越来越高,飞行时间越来越长。获取试飞条件下飞行器表面热流等参数,飞行器总体方案的优化具有重要的意义。航天领域常用的热流传感器有热阻式、热容式、红外测量式等[1]。热阻式传感器的敏感端通常在测量环境中,不能根据飞行器外形随形打磨,对于具有一定曲率变化的型面,热流测量存在偏差。热容式[2-4]传感器不能够适应长时间热流测量的需求,红外测量技术难以应用到飞行测试环境中,采用热流反辨识的方法可以满足长时间热流测量、敏感端不裸露在外的需求。Pourgholi R 等人[5-11]对辨识算法进行了相关的研究和改进。Mongibello L 等人[12]采用热流辨识的原理制备了辐射热流传感器。
文中基于热流反辨识的技术,设计了一种新型热流测量装置。其优点是测量点不在测量面上,传感器可以随飞行器外形适当打磨随型;热流测量不受时间限制。
1 热流测量原理及步骤
该热流测量装置的工作原理是通过测量材料的温度响应,采用多维热流辨识的方法反推热流。热流测量装置是通过测点获取温度信息,为热流反辨识提供输入条件。辨识算法是在时间域上进行表面热流辨识,即根据温度随时间的变化历程,辨识出热流随时间的变化历程。从原理上实际是通过温度传感器测量温度值,通过对温度值的处理得到热流,温度值的测量不受时间的限制,因此,辨识得到热流也不受时间的限制。此类问题属于热传导的逆问题,是典型的不适定问题,将热传导逆问题转化为优化问题,再利用优化算法来求解逆问题中的热流。
多维热流辨识算法采用共轭梯度法。 Q ( x , y , t )的辨识问题等价于求合适的 Q ( x, y , t )使如下目标函数达极小的优化问题,见公式(1):

式中:t 为温度测量的时间段,t=[0, tf];M 为测量面的测点个数; Q ( x, y , t )为Q 的空间和时间函数。
首先获取温度响应数据,选择一维或多维热流辨识方案。然后建模、网格划分以及辨识计算,对辨识出的热流进行冷热壁转换处理。热流辨识过程如图1所示。
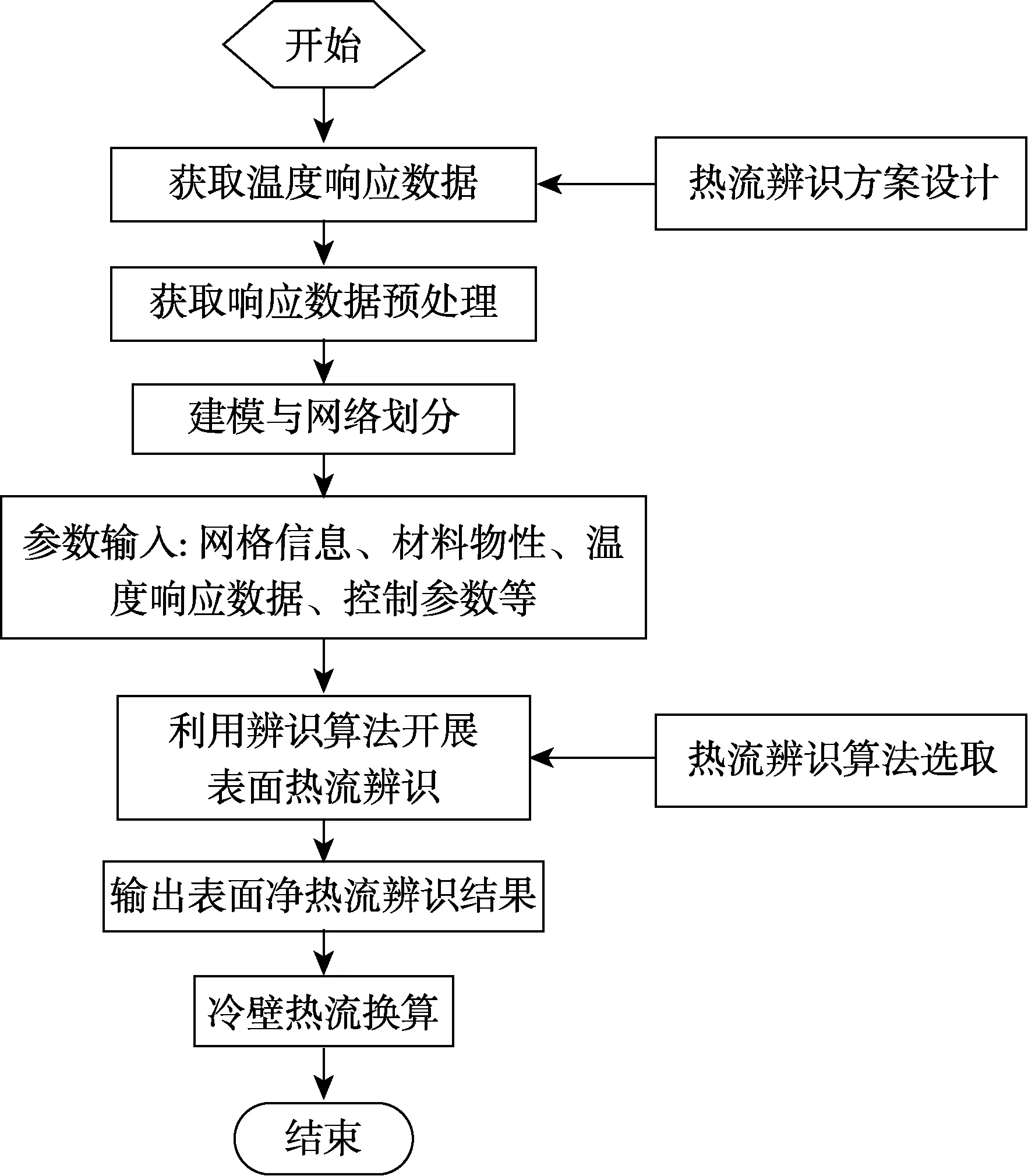
图1 热流辨识过程Fig.1 Heat flux identification process
2 热流辨识装置的优化设计
热流辨识装置敏感端优化设计需要满足如下条件:1)尺寸尽量小,方便多布点;2)传热路径以及传热速度要明确,方便反算热流;3)受周围结构温度的影响尽量要小;4)测温点时间延迟要小;5)敏感端外表面可以适度打磨,以适应飞行器外形面。
2.1 敏感端材料选择
由于热流辨识装置的温度测点布置在敏感端的内壁面,因此为了降低辨识热流时间上的延迟,需要敏感端内外壁面的温差尽量小,通常选用热导率较高的金属材料。文中采用铜和钢作为备选材料,施加相同的表面热流边界(如图2 所示),敏感端内外壁温差情况如图3 所示。相同厚度(5 mm)的钢与Cu 内外壁温差占比具有量级的差距,Cu 内外壁温差占比峰值约为1. 3%,而钢内外壁温差占比峰值接近12%。 从热响应获取时间延迟角度来看,Cu 具有较大的优势,因此,选用Cu 作为敏感端方案最优。
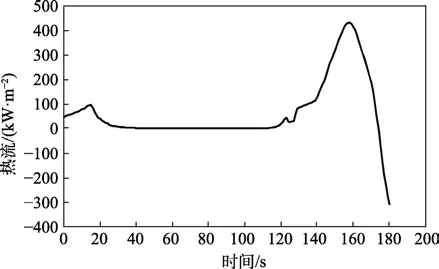
图2 敏感端外壁热流边界Fig.2 Sensitive side outer wall heat flux boundary
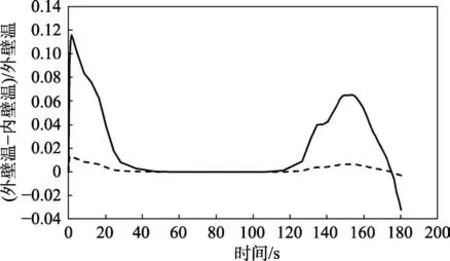
图3 敏感端内外壁温差占比Fig.3 Interior and exterior wall temperature difference of sensitive side
2.2 敏感端传热路径设计
热流辨识传感器传热路径设计如图4 所示。设计思路如下:1)敏感端与壳体之间不接触,留有一定的“间隙”,尽量减少敏感端与舱体之间的传热;2)敏感端与壳体之间采用焊接的方式固连,消除接触热阻,减少传热分析的不确定度;3)“安装面”与舱体内壁面接触,采用垫石墨纸的方式尽量消除接触热阻的影响。

图4 传热路径设计Fig.4 Design of heat transfer path
2.3 敏感端厚度设计
铜敏感端内外壁温差占比如图5 所示,可以看出,3 mm 厚度敏感端相对5 mm 厚度内外壁温差占比较小,但不存在量级上的差距。综合考虑敏感端外表面需要与飞行器外表面随型打磨,选用5 mm 的厚度具有一定的安全可靠性。
2. 4 敏感端打磨影响分析
建立有限元分析模型如图6 所示,敏感端打磨前后形貌如图7 所示,热流边界按照图2 中所示。敏感端打磨前后的测点温度计算结果如图8 所示,可以看出,敏感端的适度打磨基本不影响温度测量结果。因此,打磨对热流辨识结果的影响不大,证明了该测量方案具备适度打磨的可行性。
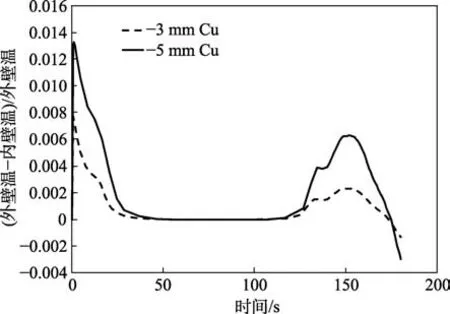
图5 不同厚度铜敏感端内外壁温差占比Fig.5 Different interior and exterior wall temperature of copper sensitive side with different thickness
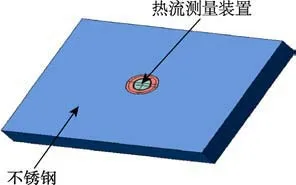
图6 温度分析模型Fig.6 Temperature analysis model
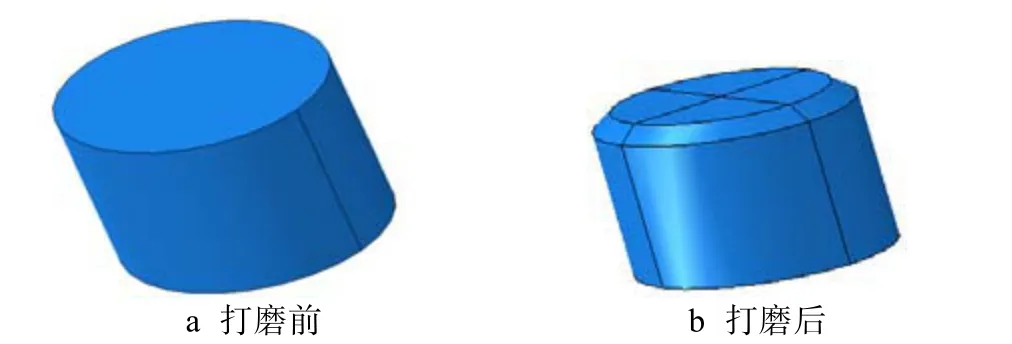
图7 敏感端打磨前后形貌Fig.7 Sensitive side morphology before and after grinding: a) before grinding; b) after grinding

图8 打磨前后测点温度结果Fig.8 Measuring point temperature before and after grinding
3 热流测量装置研制
基于优化设计结果,研制出热流测量装置,如图9 所示。
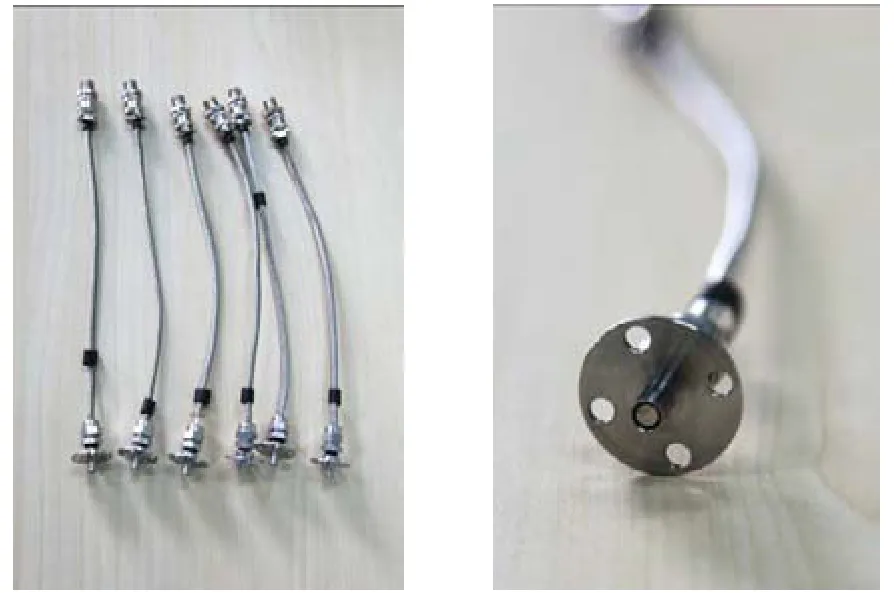
图9 热流测量装置产品照片Fig.9 Heat flow measurement device product
4 地面试验验证
文中采用石英灯加热来进行试验验证。热流测量装置可以满足长时间滑翔类飞行器的外壁热流测量的需求。这类飞行器外壁热流主要是由气动加热引起的,属于对流加热范畴,而石英灯加热属于辐射加热,热流测量装置敏感头表面发射率的高低会影响温度测量结果。因此,为了实现石英灯与对流换热达到一样的加热效果,在石英灯加热试验前需要对敏感头表面进行涂黑处理,确保试验热流95%以上进入敏感头表面。
采用石英灯加热的方式对传感器进行验证,地面试验热流曲线如图10 所示。辐射加热试验时,测点位置及编号如图11 所示,共四个新研热流测量装置(编号1#—4#)。试验件的安装如图12 所示。
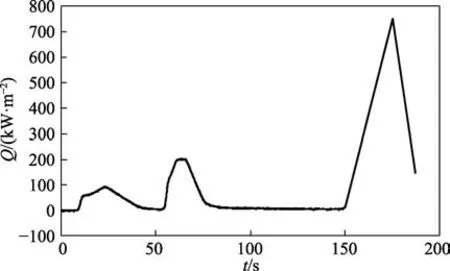
图10 加热热流控制曲线Fig.10 Heating heat flow control curve
热流测量装置获取的温度曲线如图13 所示,四个测点温度数值比较接近,在最后峰值时刻略有差别。通过采集的温度数据辨识获得的热流数据与实际控制热流的对比如图14 所示。可以看出,辨识获得的热流数据与实际控制热流吻合较好,最大偏差约15%,但辨识热流在热流变化较剧烈的拐点处精度会出现偏差。分析原因为热流测量原理所致,该装置测量点不在外表面而在内表面,温度数据获取具有一定的延迟性。

图11 试验件测点分布Fig.11 Measuring point distribution of test pieces
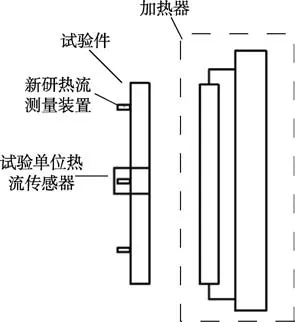
图12 辐射加热试验件安装Fig.12 Installation of radiation heating test pieces
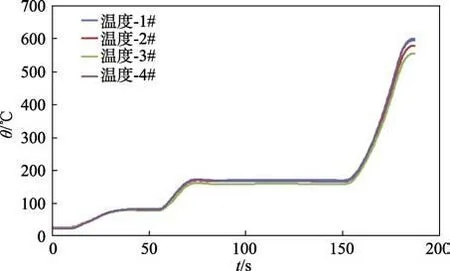
图13 热流测量装置获取的温度曲线Fig.13 Temperature curve obtained through heat flow measurement device
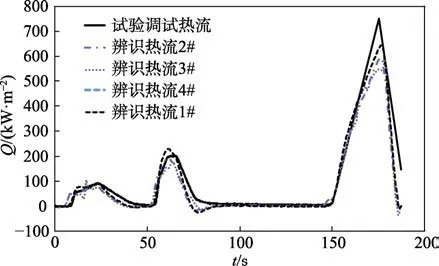
图14 辨识热流与控制热流对比Fig.14 Identification heat flow compared with control heat flow
5 结论
文中研制了长时测量、表面可随型打磨的热流传感器,并经过石英灯加热地面试验验证,证明了传感器的有效性,为后续长时、高精度热流测量提供了新的思路。
猜你喜欢
现代园艺(2022年17期)2022-08-23
东坡赤壁诗词(2022年1期)2022-02-25
小资CHIC!ELEGANCE(2021年40期)2021-11-08
汽车实用技术(2021年10期)2021-06-04
少儿科技(2021年2期)2021-05-17
航天器工程(2021年2期)2021-04-27
舰船科学技术(2021年2期)2021-04-10
实验流体力学(2020年5期)2020-11-03
宇航计测技术(2020年4期)2020-09-10
——以徐州高层小区为例
建筑技艺(2019年9期)2019-11-27