
LH-2微小卫星综合电子系统设计及姿态控制研究
2020-03-03 08:27徐喆垚陈宇坤张义超曹梦磊
载人航天 2020年1期
徐喆垚,陈宇坤,张义超,曹梦磊,孙 戎
1 引言
微小卫星一般是指10~100 kg级的小型卫星系统,具有体积小、集成化程度高、功能密度高、投资与运营成本低、灵活性强、系统建设周期短等诸多优点[1-2],在教育、科研试验中广泛应用。阿尔及利亚微小卫星ALSAT-1采用动量轮、飞轮、冷喷气和磁力矩器作为姿控机构,Mohammed等[3]给出了该卫星的姿态确定系统和控制算法。2009年日本发射了50 kg级的MAIDO-1微小卫星[4],采用自旋稳定的姿态控制方式。夏威夷空间飞行实验室研制的60 kg级LEO-1小卫星[5]用于验证太阳电池和导弹跟踪技术,轨道为600 km的太阳同步轨道,采用磁力矩器和反作用轮进行三轴稳定;2个太阳传感器、三轴磁强计和惯性测量单元用于姿态确定。Takenaka等[6]采用微小卫星(质量为48 kg,边长为50 cm立方星)在低地球轨道上与地面站之间进行量子通信试验。
微小卫星在功能和系统组成上与传统大卫星相似,包括结构系统、供配电系统、热控系统、姿态与轨道控制、测控系统、数据管理系统等。但微小卫星由于受体积限制,要求具有高度的集成化,在卫星架构、控制模式上与大型卫星有许多不同点[7-8]。微小卫星不像大卫星通过机构调整帆板指向,需要调节自身姿态使太阳帆板对日定向。Lyubimov等[9]研究了微小卫星的速率阻尼控制方法,其指向精度容易受到空间环境干扰和惯性矩变化的内在不确定性的影响。Yang等[10]提出了一种基于混合H2/H∞鲁棒控制的状态反馈姿态控制方法。Sun等[11]针对重力梯度BUAA-SAT微小卫星控制问题,提出有限时间跟踪控制策略。张宏德等[12]针对小卫星的快速定向问题,设计了微小卫星定向的姿控方案,通过姿控系统半实物仿真测试验证控制系统的正确性。
本文针对LH-2微小卫星的研制和测试阶段综合电子链路的正确性和匹配性问题,进行LH-2微小卫星的电气系统集成化设计,提出姿态控制方法,并完成控制方法的仿真测试。
2 电气系统集成化设计
LH-2微小卫星总质量约为20 kg,采用立方体结构,尺寸包络约为500×280×240 mm。卫星装有4块太阳帆板,可通过锁紧机构固定在卫星本体4个侧面。卫星和运载器分离进入轨道后,通过松开锁紧机构,使太阳帆板展开。太阳帆板展开后呈十字分布,如图1所示。

图1 LH-2微小卫星Fig.1 LH-2 microsatellite
LH-2微小卫星采用一体化的综合电子系统设计思路,以星载计算机模块为核心,辅以测控数传模块、GPS导航接收模块、电源控制模块、姿态控制模块以及有效载荷模块等部分,各板卡之间采用标准接插件连接,各模块的信息共享,如图2所示。综合电子系统具有多种数据交换接口,包括模拟接口、数字接口和总线接口。采用冷热备份形式,实现冗余,在出现故障时启动备份,保证系统正常工作。

图2 综合电子系统Fig.2 Integrated electronic system
星载计算机模块完成星务管理功能,其中星务管理分系统是整星电子系统的核心,星务计算机负责卫星的任务调度和综合信息处理。星务软件要对星上各任务模块的运行进行高效可靠的管理和控制、监视全星状态并协调整星工作、接收地面遥控指令及实现飞行遥测参数的下传。
测控数传模块实现对下行遥测信息调制变频、上行遥控信号合成解调,包含基带信号处理FPGA单元、模数转换单元、数模转换单元、频率综合器、接收解调单元、调制发射单元、双工合路器。其中双工合路器将调制发射单元输出的下行发射信号分成等功率的2路,分别送给2幅天线,将它们接收的上行信号合并为1路输出给接收解调单元。频率综合器产生载波信号,并提供基准时钟信号。整体结构如图3所示。

图3 测控数传模块Fig.3 TT&C and data transmission module
LH-2微小卫星的电源控制模块主要是由太阳电池阵、蓄电池组和电源控制模块组成。电源控制模块实现太阳能电池分流调节、蓄电池充放电管理、负载电源管理、二次电源转换等功能,如图4所示。该模块是星上能源管理的核心,采用4路分流管理,通过分流调节母线电压,二次电源变换模块DC-DC调整二次电源输出,同时具备太阳能电池阵输出电流检测、母线电压滤波功能。在光照期间,调整卫星帆板朝向,使太阳光正面照射到太阳电池阵,给负载供电,同时给蓄电池组充电;在阴影期间,蓄电池组提供负载功率。

图4 电源控制模块Fig.4 Power control module
姿态控制模块、姿态测量敏感器与姿态控制执行机构组成小卫星的姿态控制系统,如图5所示。姿态控制系统主要完成星箭分离后的姿态稳定、初始姿态确定以及对日定向以实现帆板对日能源采集;或对地定向以实现对地特定区域载荷功能,如拍照成像和数据下传。

图5 姿态控制系统Fig.5 Attitude control system
1)姿态测量敏感器包括2个数字式太阳敏感器、1个三轴陀螺和1个三轴磁强计、1个GPS模块,传感器采用小型化设计。数字式太阳敏感器质量为30 g,测量精度中心视场优于0.2°,视场范围优于-60°~+60°,采用CAN总线的数据输出方式;陀螺测量范围大于±350°/s,零偏稳定性≤0.5°/h,加速度计分辨率≤2μg;三轴磁强计质量为40 g,测量范围为±2 Gauss,分辨率为 6.7 nT,采样频率为30 Hz,采用RS232串口通讯;GPS模块测量位置精度不大于15 m,速度精度小于0.05 m/s。
2)姿态控制模块作为控制器,与各敏感器通过CAN总线、RS232接口连接,实现敏感器的数据采集和处理,姿控软件完成姿态确定算法、姿态控制算法等。
3)执行机构包括3个反作用飞轮和3个磁力矩器。反作用飞轮的转速范围为-6000~6000 rpm,转子转动惯量为 1.067×10-4kg·m2,最大角动量为0.067 kg·m2/s,最大输出力矩为0.01 Nm,反作用飞轮供电电压为12 V供电,通讯接口为CAN总线;磁力矩器长为180 mm,线圈匝数为6400,总质量为108 g,额定工作电压为5 V,提供磁矩大于2.5 A·m2。3个反作用飞轮和磁力矩器分别沿体轴3个方向正交分布。卫星的姿态控制主要采用飞轮精确控制,磁力矩器作为飞轮卸载工具和分离后的速率阻尼。
3 姿态控制
3.1 微小卫星动力学
姿态控制系统是综合电子系统重要组成,覆盖多个执行机构和敏感器,进行自控测试可验证综合电子系统设计的正确性和匹配性。微小卫星的仿真测试,需要建立卫星的动力学模型和环境模型,动力学模型包括姿态动力学、轨道动力学,环境模型包括地磁模型、太阳矢量方向模型等。
微小卫星在空间中受到空间环境力矩、磁力矩器作用力矩和飞轮输出力矩作用,动力学方程如式(1)所示:

式中:T为空间环境力矩、磁力矩器作用力矩之和。h为飞轮的角动量,I为卫星转动惯量矩阵,微小卫星的角速度ω为体坐标系相对于轨道坐标系的角速度矢量与轨道角速度矢量两部分组成。姿态运动学方程如式(2)所示:

LH-2微小卫星采用太阳敏感器和磁强计进行姿态确定,在进行仿真时,需要用环境模型来测试姿态以确定算法的正确性,其中地磁场势函数如式(3)所示:

式中,λ为地理经度,θ为地理纬度,RE为地球半径,pmn为n阶m次勒让德函数,gmn与hmn为高斯系数,r为微小卫星相对地心的距离。地球磁位势在3轴方向的梯度为地球磁场矢量,直接给出简化的偶极子模型如式(4)所示。通过坐标转换矩阵转换到轨道坐标系和体坐标系下。

式中, BEx、BEy、BEz为地磁场在惯性坐标系 x、y、z 3个方向的投影。
太阳矢量方向模型用作太阳敏感器的仿真输入。太阳光线和地球赤道面的夹角一年内在南北回归线之间周期变化,则地心惯性坐标系中的太阳光线的高低角ε如式(5)所示:

式中,Tday为求解时间距离当年1月1日的天数。
太阳方位角γ如式(6)所示:

太阳矢量在惯性系如式(7)所示:
然后可通过Sb=CS坐标转换矩阵转换到体坐标系。Sb为太阳矢量在本体系下的表示,C为惯性系到本体系的转换矩阵。
3.2 LH-2控制模式
通常大型卫星帆板安装有转动机构,可以实现帆板对日,而微小卫星结构紧凑,只能通过调整卫星姿态实现定向,因此在控制模式上与大型卫星不同。微小卫星对日定向阶段要调整姿态使帆板指向太阳,对地工作阶段要调整到对地指向。在2个姿态指向切换过程中,针对微小卫星大角度机动控制问题,设计姿态四元数的闭环控制率,参考输入为期望的姿态四元数和期望角速度,如图6所示。

图6 姿态控制回路Fig.6 Attitude control loop
姿态角控制采用偏差四元数和偏差角速度的PD控制形式,如式(8)所示:

式中,kp和kd为比例微分系数,δq为姿态误差四元数,由式(9)计算可得,δq0为误差四元数的标量部分,由式(10)计算可得,δω为角速度偏差,可以通过等式(9)和(10)得到

使用磁力矩器进行飞轮卸载,LH-2微小卫星采用磁力矩为飞轮卸载,取磁矩 m =,其中B为地球磁感应强度,Δh为卫星产生的磁通量,K为控制参数,则磁力矩如式(11)所示:

微小卫星与火箭分离后,将依次进入无控阶段、速率阻尼阶段、太阳搜索阶段、对日定向阶段、对地定向阶段。无控阶段保证微小卫星与火箭分离后,远离到安全距离;之后微小卫星开始进入速率阻尼阶段,即降低卫星分离后角速度,此阶段采用磁力矩器作为执行机构;太阳搜索阶段搜寻太阳并完成初始的姿态确定;微小卫星根据任务需求,分别进入对日定向阶段和对地定向阶段,调整卫星姿态使载荷或天线指向地球特定区域,实现载荷功能或数据下传。
1)速率阻尼。速率阻尼采用Minus-B-dot控制方法,如公式(12)所示:

式中k为一待求常数矩阵,Bb为本体系下的磁感应强度,m为计算得出的控制矢量。根据实际硬件情况,给定磁矩输出范围±2.5 A·m2。输出力矩如公式(13)所示:

其中,Tm为产生的控制力矩。
2)太阳搜索。在速率阻尼之后,卫星进入太阳搜索模式,先绕y轴转动一周,搜索太阳。若未搜索到太阳,之后绕x轴转动90°后再绕y轴转动一周,这样扫描区域可覆盖整个天球。
3)对日定向。根据太阳矢量在轨道坐标系下的方位角δS和αS及姿态变换的对应关系,将卫星按照φ→δS,θ→αS,ψ→0做姿态跟踪控制,实现对日定向。其中,φ、θ、ψ分别为本体系相对轨道系三轴姿态角, δS、αS由式(14)、(15)可得,如图7所示。

图7 太阳方位角Fig.7 Azimuth angle of sun vector

式中,Sox、Soy、Soz分别为太阳矢量在轨道系下3个轴的投影。
如果太阳帆板的正向指向体坐标系的+z轴方向,则对日定向模式的目标姿态四元数如式(16)所示:

在姿态跟踪控制下可使太阳帆板指向太阳。
4)对地定向。对于微小卫星,对地定向是指载荷对地工作时,要求卫星姿态指向地心方向,对于LH-2卫星此时姿态控制期望角度为零,也就是 q~= [1 ,0,0,0]T。
4 控制仿真
仿真采用MATLAB,使用龙格-库塔法对微分方程式(1)和式(2)进行积分计算。初始分离角速度给定0.2 rad/s,分离后先后经历初始的无控阶段、速率阻尼、太阳搜索、对日定向、对地定向,姿态控制曲线如图8~图10所示。
1)与运载分离后0~2 s内,微小卫星处于无控模式,之后进入速率阻尼;

图8 全过程姿态角Fig.8 Attitude angle during simulation
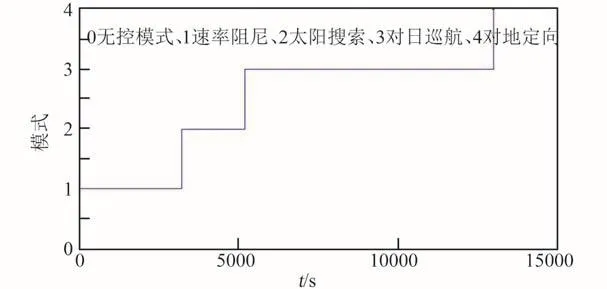
图9 卫星工作模式与时间关系Fig.9 Satellite working mode over time

图10 阴影区和光照区Fig.10 Shadow area and sunshine area
2)3218 s时完成速率阻尼,进入太阳搜索模式。搜索过程中,卫星初期长时间处于阴影阶段,此时不进行转动搜索,卫星保持速率为零;
3)约4795 s进入光照区后,开始搜索;
4)5199 s时搜索到太阳,实现姿态调整对日定向,进入对日定向阶段;
5)7726 s时再次进入阴影区,卫星做姿态保持;
6)约11 056 s再次进入光照区,并再次对日定向;
7)13 000 s程控进入对地定向模式,调整姿态对地。
磁力矩器力矩输出和飞轮力矩输出如图11和图12所示,磁力矩器开始段输出力矩实现速率阻尼,5000 s时的输出力矩为飞轮卸载。控制系统对飞轮输出力矩最大值按照0.005 Nm进行限幅,飞轮输出力矩在大的角度调整段出现满力矩输出,其它时间段输出力矩较小。通过全过程仿真可以看出,选定的姿控组件(飞轮、磁力矩器)姿态确定敏感器可以满足全过程的姿态确定和姿态控制需求,磁力矩器在较大的分离初始角速度下仍实现速率阻尼和整个轨道周期中的飞轮卸载。

图11 磁力矩器输出Fig.11 Output of magnetic torque

图12 飞轮输出Fig.12 Flywheel output
5 结论
1)LH-2微小卫星采用了集成化电气系统设计方案,以星载计算机模块为核心,辅以测控数传模块、GPS导航接收模块、电源控制模块、姿态控制模块以及有效载荷模块,各板卡之间采用标准接口连接,各模块的信息共享。
2)针对LH-2微小卫星全周期的姿态控制,采用偏差四元数实现姿态控制,并进行仿真测试,包括分离后的无控阶段、速率阻尼、太阳搜索、对日定向、对地定向等阶段,小卫星可以实现快速稳定的姿态机动。本文给出的控制算法可用于LH-2微小卫星的半实物测试,用于验证星务计算机、姿控机构、敏感器等硬件回路的正确性。
猜你喜欢
材料研究与应用(2022年4期)2022-09-01
汽车实用技术(2022年13期)2022-07-19
中学生博览(2022年9期)2022-06-21
军民两用技术与产品(2021年6期)2021-10-14
飞控与探测(2021年2期)2021-08-12
环球飞行(2021年12期)2021-02-07
宇航材料工艺(2020年6期)2021-01-28
北京青年周刊(2020年33期)2020-08-28
建筑工程技术与设计(2015年29期)2015-10-21
农机使用与维修(2014年12期)2014-12-17
