
基于阻尼多级分段调节的半主动悬架系统
2020-03-09 13:12
计算机测量与控制 2020年2期
(无锡职业技术学院 汽车与交通学院,江苏 无锡 214121)
0 引言
随着汽车高速化的发展,传统被动悬架已不能满足汽车的减振需求,半主动悬架和主动悬架得到了广泛的发展与应用。国内外学者对半主动悬架和主动悬架进行了大量的研究,取得了丰硕的成果[1-5]。马克等人设计了一种基于主动悬架非脆弱H∞控制器[6]。梁辉等人研究了车辆的半主动悬架分数阶天棚阻尼控制[7]。周创辉等人提出了一种基于改进型天棚阻尼控制算法的馈能式半主动油气悬架系统[8]。Ayman等人对双横臂悬架系统动态特性进行了分析[9]。Kavitha等人提出了一种双横臂悬架系统的主动外倾角和前束控制策略[10]。
传统的被动悬架的弹性元件不仅起动到承载车身重量的作用,还是存贮液压能量和吸收液压能量的部件,但被动悬架减震器油液量需要维持在一个足够大的数值[11-13],以确保减震器筒内液压能够通过流通阀在不同的腔内流通。但实际使用中,减震器内部液压数值往往不能保持那么大数值,这样会极大地降低减震器的减震效果。半主动悬架可以通过改变流通阀的流通面积,以改变悬架系统的阻尼,保证减震器筒内液压能够快速在两筒之间流动。传统的半主动悬架按照流通阀等阀门打开的面积,把阻尼的改变分为软、硬和适中三个等级,这样设计方法在一定程度上改善了减震器的减震效果,但是由于路面状况的随机性和路面的多样性,简单的半主动悬架三级阻尼设计方法已不能和多样性路面很好的匹配,导致现有的半主动悬架减震效果不能完全发挥。针对这一问题,本文在传统的液力减震器上,设计了利用电磁阀改变节流阀的流通截面面积的大小,进而控制节流阀进出油液量,以把减振器阻尼进行多级分段调节,从根本上解决问题。
1 模型的建立
通过对车辆悬架进行力学分析,根据车辆舒适性[14-15],安全性优化设计目标,利用悬架动扰度作为约束条件,建立在不同车速,不同路况,不同车辆的参数以及不同震动情况下的车辆悬架最佳阻尼比优化设计目标函数和数学模型。
1.1 半主动悬架动力学模型
1/4汽车半主动悬架模型,如图1所示,作为阻尼可变式半主动悬架,需要确定其阻尼的变化范围。

图1 1/4汽车半主动悬架模型
二自由度1/4汽车半主动悬架的震动方程为:
(1)
(2)
其中:Csemi(t)的变化范围为0≤Csemi(t)≤Cmax。

因此,需要确定减震器阻尼系数的范围,需要研究阻尼匹配的阻尼控制规律和最优解。
设单轮总质量为mt,单轮赛下质量为md,则单轮簧上质量为mu=mt-md。根据悬架系统最佳阻尼比,可得悬架系统最佳阻尼系数为:
Cs=4πξfomu
(3)
式中,ξ为悬架最佳阻尼比,是由被动悬架最佳阻尼匹配所决定的;fo为悬架固有频率。
因此,根据悬架系统杠杆比i,可求得减震器复原行程在首次开阀时的阻尼系数为:
Cd1=4πξfomu/i2
(4)
根据减震器平安比η的定义,可得:
ηps=k1k2=Cd1/k2
(5)
式中,k1为减震器首次开阀前的速度特性直线的斜率;k2为最大开阀前的速度特性直线的斜率。
因此,可得减震器复原行程最大开阀前速度特性面线的斜率k2为:
k2=C1/ηps
(6)
根据阻尼力与阻尼系数和速度之间关系,可得到减震器复原行程最大开阀阻尼系数Cd2为:
(7)
式中,Vk1和Vk2分别为减震器首次开阀速度和最大开阀速度;Fdk1和Fdk2分别为减震器在首次和最大开阀时的阻尼力。
将Fdk1=Cd1Vk1和k2=Cd1/ηps代入上式,得:
(8)
根据减震器压缩行程和复原行程阻尼特性的双向比βd,可得减震器压缩行程在开阀前后的阻尼系数分别为:
Cd1y=βdCd1=βd4πξfomu/i2
(9)
(10)
由以上分析可知,利用车辆参数以及复原行程和压缩行程的初次开阀速度和最大开阀速度,可求得减震器复原行程的首次开阀阻尼力Fdk1和最大开阀阻尼力Fdk2,以及压缩行程的首次开阀阻尼力Fdk1y和最大开阀阻尼力Fdk2y。因此,可得设计减震器要求的分段线性速度特性曲线,如图2所示。

图2 速度特性曲线
1.2 半主动悬架系统基于安全性和舒适性的数学模型

(11)
式中,ξ*为基于不同行驶路况,车速v和单轮簧上质量情况下的最佳阻尼比,ξ*=ξ(Gp,v,m);ξoc为悬架系统最舒适所对应的阻尼比,ξoc=0.1748;ξos为悬架系统最安全所对应的阻尼比,ξos=0.4136。
1.3 半主动悬架系统最佳阻尼系数
(12)

代入得:
(13)
式中,Csc为舒适时悬架系统所要求的阻尼系数,Csc=0.7πfomu;Css为最安全时悬架系统所要求的的阻尼系数,Css=1.65πfomu。
由于最佳阻尼系数ξ*是随不同行驶路况,车速v和单簧上质量情况变化的,因此,半主动悬架系统最佳阻尼系数Cso也是随不同行驶路况,车速v和单轮簧上质量情况而变化的。
1.4 半主动悬架可控减震器节流参数控制规律
采用节流阀的节流孔面积A作为可控参数,而节流阀片厚度h、阀片预变形量frko和阀片最大限位间隙δmax作为不可控参数。其中,总节流面积At一般包括两部分:一部分是固定常通节流孔面积;另外一部分是可控节流孔面积,半主动悬架可控减震器设置固定常通节流孔的目的是保证半主动悬架的安全,防止可控震的可控节流孔关闭时,减振器成为刚体[16]。
(14)
将式中的减震器最大阻尼系数Cdmax替换成减震器最小阻尼系数Cdmin,便可得到减震器最大节流孔面积Amax设计数学模型,即:
(15)


因此,可得可控节流孔的面积Aseim控制规律为:
(16)
由于可控减震器最佳阻尼系数C*d是随车辆行驶路况,车速,转弯半径和单轮质量变化的,因此,可控减震器节流孔面积Aseim[17]也是随车辆行驶路况、车速、转弯半径和单轮质量而变化的。
2 硬件结构
目前使用比较多的是双向筒式液力减震器,当车辆因震动而出现相对运动的时候,减震器液压油消耗散热,工作缸内的活塞上下移动,油腔内部的液压油便会从活塞上面的通流阀反复的从一个腔流入另一个腔。随着通流阀孔壁与油液之间的摩擦,以及油液分子之间的黏性摩擦对产生的震动形成阻尼力,将震动能量转化为热能并散发到大气当中,流通阀和补偿阀是一般的单向阀,其弹簧弹力很小[18],当阀上的油压作用力与弹簧弹力同向时,阀门处于关闭状态;而当油压作用力与弹簧反向力时,则只要很小的油压,阀便能开启。压缩阀和伸张阀是卸荷阀,其弹簧弹力刚度较大,预紧力较大,只有当油压增到一定程度时,阀才能开启;当油压降低到一定程度时,阀即自行关闭,如图3所示。

图3 双向筒式液力减震器
2.1 结构分析
由图3可知,由于伸张弹簧的刚度和预紧力比压缩阀大,导致在同样的油压力作用下,伸张阀打开的液压流通通道的横截面积小于压缩阀门打开的液压流通通道的横截面积,因此导致减振器在伸张行程和压缩行程产生的阻尼力大小不同,而且前者产生阻尼力要大于后者。
2.2 结构原理
本文设计的半主动控制节流的液力减震器,是在普通的液力双向筒式的基础上,通过旁路控制转动节流阀阀芯,改变流通面积,使节流阀孔具有三个位置,从而产生三个不同的阻尼值。当速度小于0.3 m/s,汽车承受轻微的震动,节流孔产生节流阻尼力;当速度在0.3~1.0 m/s范围内,汽车承受中等强度的震动,由电磁阀控制节流孔的孔隙,这是减震器的主要工作;当速度大于1.0 m/s,悬架剧烈震动,车轮高频震动,电磁阀控制节流孔的节流间隙开到最大,这与轮胎和路面接触的情况密切相关。
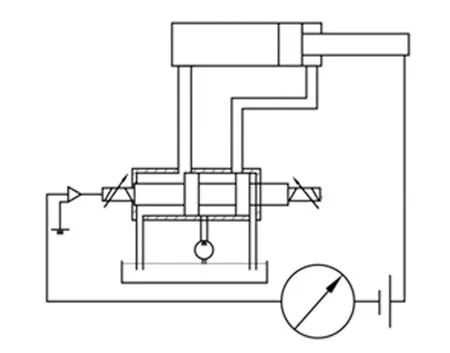
图4 工作原理图
减小节流孔的通道截面积,增大了油液流动阻尼;反之,当汽车载荷减小时,增大了节流孔的通道截面积,减小了阻尼力,从而达到了随汽车载荷的变化而改变减震器阻力的目的。对油液的节流作用使减震器产生伸张运动时的阻尼作用,而减震器的弹力是伸张阀大于流通阀,孔径是伸张阀小于流通阀,综上所述,伸张行程的阻尼力大于压缩行程的阻尼力。在运动模式或者过弯工况及时增大阻尼,就能使车变得更硬朗;而在平直道路上,降低悬架阻尼能获得更好的舒适性。抑制减震弹簧在吸收路面所带来的各种冲击之后产生的反复弹跳,以加速弹簧固有震动的衰减,根据路况和行驶状态自动的为车辆提供更佳的驾驶平顺性。
3 控制方法与试验
使用模糊神经网络为算法,以模糊控制为主体,应用神经元网络,实现模糊控制的决策。以汽车平顺性指标NVH作为减震器的控制目标参数,控制对象为车速、汽车振动加速度、汽车重量。建立基于平顺性指标的模糊控制系统,并确定其模糊控制规则。建立表征NVH的方程:
NVH =f(x1,x2,…,xn) =S
(17)
其中:x1,x2,x3为影响NVH的变量;S为描述NVH状态的参数,S= -2表示一级阻尼,S= -1表示二级阻尼,S=0表示三级阻尼,S=1表示四级阻尼,S=2表示五级。建立基于NVH预测的神经网络图。
图5是一个3层神经网络图。该神经网络的输入变量是汽车行驶速度、汽车在垂直方向的振动加速度以及汽车整车重量,它们分别用x1,x2,x3表示,而且不同的神经元之间通过权系数相互联系。神经网络系统的输出参数为NVH,表示汽车平顺性指标。最后,应用误差反向传播算法(error back propagation,BP)的方法对网络连接权值进行适当调节。

图5 神经网络图
在模糊控制器的设计中,汽车平顺性指标NVH模糊论域值取为[-3,3],而NVH正负变化的误差变化率可用d(NVH) /dt表示,它的模糊论域也可以取值[-4,4]。模糊子集定义为{PB(正大),PS(正小),Z(零),NS(负小),NB(负大)},然后根据以上分析构建模糊规则表,即可求出汽车平顺性指标NVH的控制曲线图[19]。
对装有该悬架的车辆进行了试验,让车辆驶过单凸块的时域信号,其中横坐标为历经时间,纵坐标为垂直加速度信号,试验图6所示。试验条件:汽车的单轮簧载质量为241 kg,对应的非簧载质量111 kg,悬架弹簧刚度为87 kN/m,使用的轮胎的刚度为39882 kN/m,采集汽车质心处的加速度信号。汽车以65 km/h速度直线驶过有单凸块(凸块几何参数满足国标GB/T 12534与GB/T 4970-2009汽车平顺性脉冲输入试验规范要求:三角凸块长度为40 cm,高度为60 cm,横向宽度为300 cm)的路面工况。分别记录装有被动悬架的样车通过该区域的车身振动加速度信号。
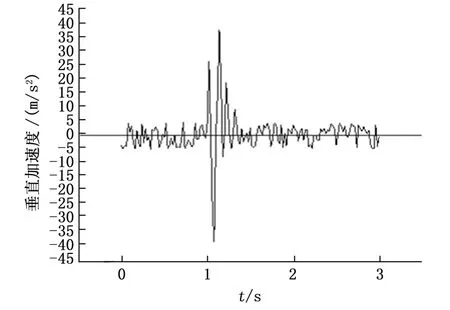
图6 悬架系统的垂直加速度响应
由图6为汽车驶过单凸块过程中,车身垂直振动加速度试验数值。从图6可以得知,车身最大的加速度数值为40 m/s2,振动量非常大。汽车悬架系统检测到该信号之后,立刻对减振器阻尼进行调控,在此过程中还需要考虑整车重量和车速信号,综合以上信息按照预定的模糊神经网络算法进行减震。从图6的数值可知,峰值之后的振动信号的衰减非常迅速,说明减震器控制效果良好,减震器减震效能佳。
4 结语
本文设计了一种多级分段调节减振器阻尼的方法,利用节流阀处电磁阀,达到节流控制流量的目的。建立了数学模型,设计了相关的硬件结构,开展了单凸块的振动试验,验证了其控制效果。得出了以下结论:
1)多级减震器不需要消耗汽车太多的能源,节省了资源,对纯电动而言,有重要的节能意义;
2)该系统结构简单,控制方便,技术要求低,不占用汽车太多的空间,维修成本低,保养比较容易;
3)有效解决了普通液力减震器内的油液不能在两个腔室内快速转换的问题,提高了舒适性和操纵性;
4)提高汽车的减震效果;
5)根据路况和行驶状况自动控制阻尼,具有较好的可靠性。
该减震器减震效果良好,为减震器的设计提供了一个方向,其生产和引用前景十分广阔,预期会有显著的社会经济效益。
猜你喜欢
橡塑技术与装备(2022年10期)2022-10-03
材料研究与应用(2022年4期)2022-09-01
山东建筑大学学报(2022年2期)2022-04-29
汽车实用技术(2021年22期)2021-12-11
油气·石油与天然气科学(2021年12期)2021-12-11
军民两用技术与产品(2021年6期)2021-10-14
汽车实用技术(2021年16期)2021-09-09
宇航材料工艺(2020年6期)2021-01-28
宇航学报(2020年4期)2020-05-21
科学与技术(2019年12期)2019-03-29
