
基于图像识别的激光光路自动调节系统设计
2020-03-16 02:31武剑
电子技术与软件工程 2020年24期
武剑
(天津核工业理化工程研究院激光技术研究所 天津市 300171)
1 引言
激光光路在长距离传输试验中,会因气流扰动、光学平台震动以及反射装置镜架热变形等原因发生抖动或漂移[1]。随着光路传输系统的工程化应用,研究激光光路的自动调节技术是十分必要的。本文基于图像识别技术针对激光光路传输过程设计了一个自动调节系统,在激光光路出现偏移或其它异常情况时可以实时对光路进行闭环调节,实现光路动态稳定。
2 系统设计原理
由阵列反射镜组成的激光光路调节装置工作示意图如图1 所示,激光自下而上在镜像安装的阵列镜片间依次反射形成传输光路,每个镜片均由其背后的两台步进电机控制水平和俯仰角度。

图1:阵列反射镜调节装置工作示意图
光路自动调节系统的基本原理是通过摄像机对多阵列反射镜的整体图像进行拍摄采集,得到反射镜面上的光斑图像。使用现场计算机对采集到的光斑图像进行识别处理分析,获得反射镜片中心坐标及激光光斑中心坐标,其差值即为激光光斑的实际位置与目标位置之间的偏差,将其作为光路自动调节的反馈控制信号,以此计算出控制镜片角度的电机的行进步长,最后驱动相应步进电机运行,实现光路调节目的。
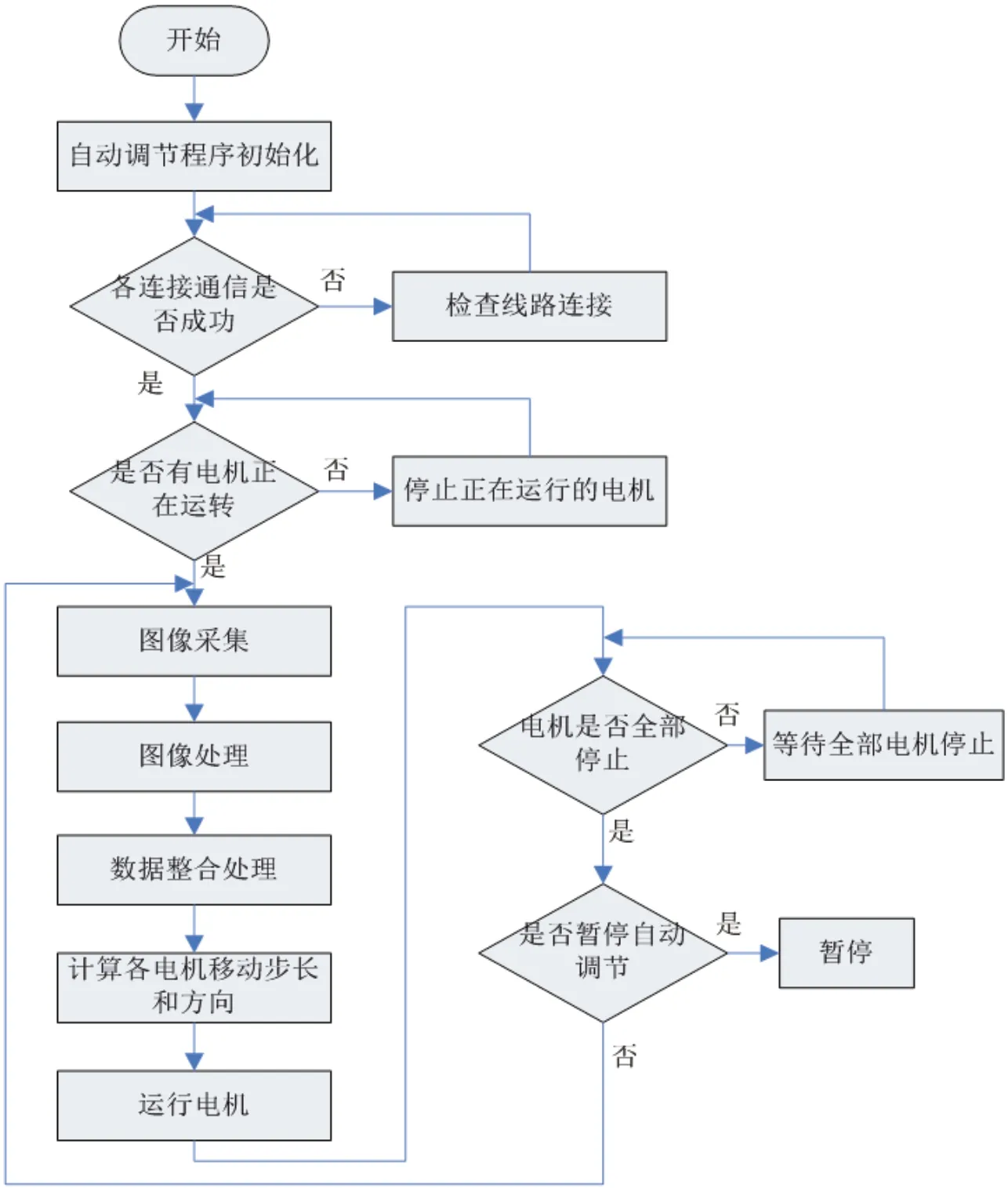
图2:光路闭环控制系统流程图
3 硬件设计
光路自动调节系统的硬件部分主要由两个摄像头、一台工控机和两个步进电机驱动箱组成。
摄像头作为图像采集单元,要求能够在实际工作中采集到完整的镜片和光斑图像,是光斑图像识别处理的前提条件。
工控机作为控制中枢,既负责整个控制系统的计算和处理,也提供光路自动控制软件的人机接口。
步进电机驱动箱是系统执行机构,内部集成有隔离稳压电源,通信模块,单片机控制模块和8 台步进电机驱动器。隔离稳压电源的作用是给整个驱动箱供电,同时,配置了滤波器、断路器和浪涌保护器提高控制箱的抗电磁干扰能力。步进电机控制箱与计算机通信使用以太网总线形式,通信协议为ModbusTCP 协议,便于与上位机集成。单片机控制模块用以解码、转码、处理和应答工控机指令[2]。8 台步进电机驱动器为最终的执行单元步进电机提供驱动电流。
4 软件设计
4.1 设计方案
系统的软件选用基于Opencv 开源函数库的VC++平台进行开发,其设计流程参照光路自动调节系统的控制原理,分为三个步骤。首先是通过图像试别获得光斑的实际位置与目标位置之间的偏差,然后是计算出步进电机需要运行的步长,最后是控制步进电机运行。光路自动调节系统的核心技术,一个是图像识别算法,一个是闭环控制算法。闭环软件在开始运行后,需要不断的循环执行图像的处理识别与电机的闭环控制程序。因此,确定软件流程图如图2 所示。
4.2 图像识别算法
图像识别算法流程包括图像数据导入、图像二值化及滤波、镜片中心定位、激光光斑定位和数据保存五个部分。
摄像头采集到的原始图像上存在大量光点噪声,因此在进行光斑图像识别前需要对采集到的原始图像进行初步的降噪处理。由于激光光路的噪声光线基本服从正态分布。因此针对本系统,高斯滤波方法能更好的完成图像降噪任务。
为不影响光路,采集摄像头不可避免具有拍摄倾角,又因为使用的是平角镜头,所以造成的图像畸变主要是梯形失真。因此,在初步处理后的图像上需要进行图像透视变换消除畸变,然后再采用Hough 直线变换[3]便可获得镜片的长方形轮廓拟合图形,进而可计算出镜片中心位置坐标。
接下来,在识别出的每个独立的镜片区域采用Canny 边缘拟合算法确定出光斑的边缘曲线,并通过重心法计算出激光光斑的中心位置及坐标。图像最终处理结果图如图3 所示,镜片边缘轮廓与光斑轮廓均已拟合完成。
最后,将激光光斑中心坐标与镜片中心坐标的差值记录在CPoint 类型的数组spot[8]里,完成图像识别处理程序。
4.3 闭环控制算法
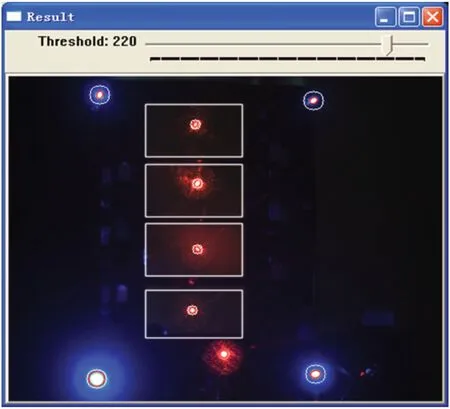
图3:图像处理结果图
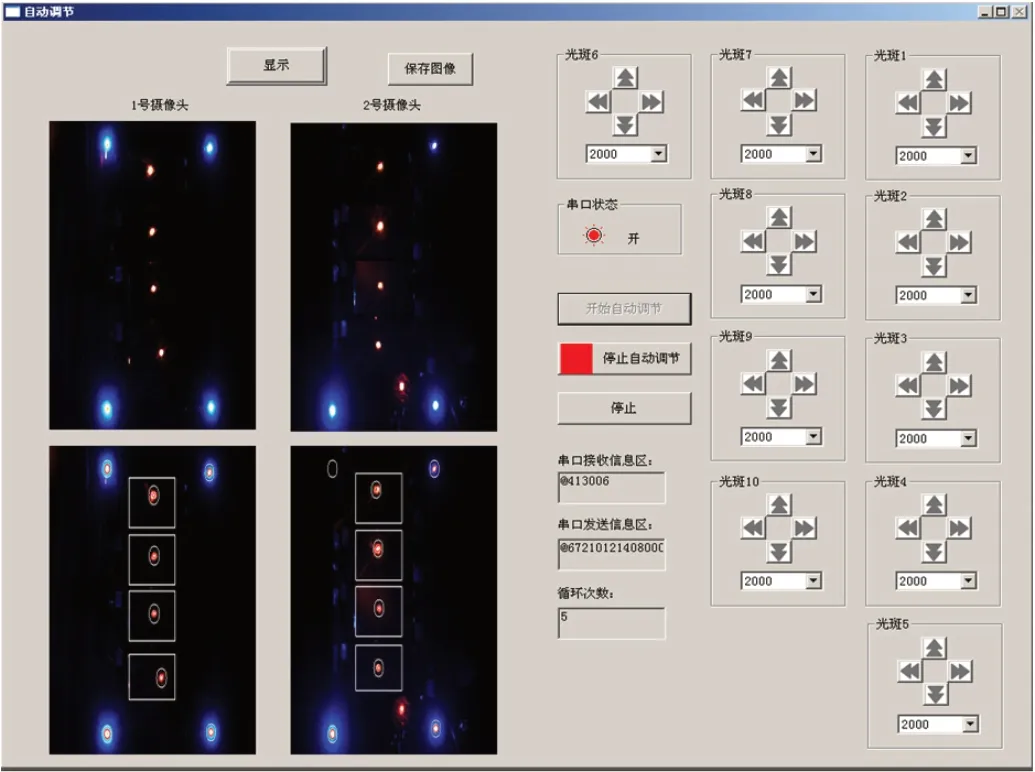
图4:闭环调节界面
每个阵列镜片上激光光斑中心位置的偏移是由光路传输通道前一镜片的角度偏移造成的,因此要实现光斑的动态稳定,实际上是要完成前一镜片的闭环控制。而每个反射镜片的角度均由控制水平方向倾斜角度和垂直方向倾斜角度的两台步进电机进行控制。这里以控制水平方向的步进电机的控制策略为例介绍闭环控制算法的原理。
如前文图1 所示,一组阵列镜片激光调节机构由镜像部署的八块反射镜片(自下而上分别为镜片0 到镜片7)组成,每块反射镜片均只能对传输光路后续光斑产生影响。设spot.x[]为激光光斑中心坐标与反射镜片中心坐标的的偏差值即激光偏移距离,则该偏差值理论上是由光路传输前端所有阵列反射镜片的偏移造成的。再设控制镜片0 水平方向角度步进电机移动x0个步长,对剩余7个镜片上光斑位置的影响系数分别为a1~a7,则激光光斑在对应镜片上移动距离可分别设为a1·x0、a2·x0、a3·x0、a4·x0、a5·x0、a6·x0、a7·x0;设控制镜片1 水平方向角度步进电机移动x1个步长,对剩余6 个镜片上光斑位置的影响系数分别为b2~b7,则激光光斑在对应镜片上移动距离可分别设为b2·x1、b3·x1、b4·x1、b5·x1、b6·x1、b7·x1;以此类推。可得关系方程(1):

根据激光的入射角与反射角角度相等、光路在镜像部署的阵列反射镜片间反射的距相等等条件可以对方程(1)的系数矩阵进行化简,最终得到方程(2)。

方程(2)即为光路自动调节系统的闭环控制模型,在激光系统中,其系数a、b 为固定常数,只要图像识别程序计算出光斑偏移值spot.x[],便可根据迭代法计算出每个步进电机需要移动的步长和方向。
方程(2)中系数a 和b 的确定,可通过实验获得。为此,本文再次利用前文的图像识别算法设计了一个计算系数的辅助程序,其基本原理是首先计算出光路正常状态下每个镜片上的激光光斑的中心坐标值,然后再按固定的光斑偏移量控制步进电机运行,然后再次计算出光路偏移状态下每个镜片上的激光光斑的中心坐标值。这样便确定了spot.x[]和x 的值,解方程(2),便可获得闭环控制模型电机对光斑的影响系数a 和b 的值。
这套闭环控制模型将图像处理后激光光斑中心位置与镜片中心位置的偏差值转换为对应步进电机需要运行的步长值,实现了闭环控制策略。经实验测试,其控制精度满足激光光路控制要求。
5 实验验证
图4 所示的是光路自动调节系统的软件界面,左侧区域为采集图像显示区域,右侧为电机控制区域。自动调节实验中,系统一直在循环监测和自动调节光斑位置,保持光路动态稳定。
6 结束语
本文设计的激光光路自动调节系统所采用的图像识别算法和闭环控制算法,可以在激光光路发生偏移的情况下,精确计算出阵列镜片上光斑的偏移量,并可计算出控制每块反射镜片的步进电机需要运行的步长,自动将光路调节回目标光路,从而维持光路的动态稳定,为激光光路传输系统的工程化应用创造条件。
本文所采用的图像识别技术,目前仅应用在目标光斑的位置计算中,在下一步工作中,可对摄像头采集到的光斑图像进行进一步的处理和研究,比如对激光光斑的能量分布和光束整形质量进行识别与判断,从而为光路传输系统的前端和后端系统提供更多的技术支持。
猜你喜欢
新能源科技(2022年9期)2022-11-20
北京航空航天大学学报(2022年5期)2022-06-06
环境技术(2020年1期)2020-03-06
测控技术(2018年1期)2018-11-25
电子制作(2018年11期)2018-08-04
理科考试研究·初中(2017年5期)2018-03-07
光学精密工程(2016年6期)2016-11-07
光学精密工程(2016年1期)2016-11-07
电测与仪表(2015年3期)2015-04-09
中国高新技术企业·综合版(2013年1期)2013-02-04
