
基于ARM反馈智能变量喷药控制系统研究
2020-03-27 12:15张明宇刘峰郑永鑫王强宋爽孙鸿
农业与技术 2020年3期
张明宇 刘峰 郑永鑫 王强 宋爽 孙鸿
摘要:为了实现变量施药和确保喷施效果,开展了基于ARM反馈的变量喷药控制系统的研究。该系统需要车载ARM控制器为核心,采用北斗导航系统获取车速,通过CAN总线获取喷嘴的流量和压力等信息。系统可以在线处理数据并发送功能代码到驱动电路,在脉冲宽度调制下根据输入用户的需要来实现比例电动调节阀的开闭量,最终基于作业行驶速度来改变喷药量的变化。试验结果表明,车辆的速度为5~11km/h,该系统变量的控制误差较小,不超过5%,满足变量喷药的操作要求。
关键词:变量喷药;控制系统;CAN总线;精准农业
中图分类号:S22
文献标识码:A
DOI:10.19754/j.nyyjs.20200215018
收稿日期:2019-11-07
作者简介:张明宇(1980-),男,本科,高级工程师。研究方向:农业工程及节水灌溉。
导言
农药是农业生产力的重要生产资料,但是,过多的投入容易导致环境污染和资源浪费。2015年,中国农药使用量为178.3万t,农药使用率为36.6%[1],低于发达国家平均50%[2,3]。因此,农药使用的主要需求从广泛的投入转移到适度,按需和按需定量投入[4]。
变量喷药技术源于精准农业的理念,是一种农业机械利用农田信息的技术,结合其目前的速度和位置自动调整农药投入量[5]。传统的基于喷雾的压力控制技术通过调节系统压力实现变量喷药。大量实验表明,液滴直径随压力的变化非常显着,该方法的流量控制将失去喷雾性能[6,7]。脉冲宽度调制是一种可变速率喷雾技术,电磁阀安装在喷射器的入口处,通过改变输入信号的占空比来控制电磁阀的间歇打开和关闭,从而实现变量喷药[8],但是,需要高频响应和电动阀的可靠性[9]。可变速喷洒在线混合农药是一种及时改变化学品浓度的技术,以实现变量喷药。由于这种方法改变了水和农药的比例,因此对系统压力和流量的影响很小[10]。然而,由于液体药物的液体流速很小,这种控制方法要求高精度,并且存在一定的系统延迟。
1 变量喷药控制系统的工作原理
在喷洒过程中每公顷施用的农药量为R(L/hm2)計算公式为:
R=60000Q/Dv(1)
式中:Q为喷嘴瞬时流量,L/min;D为有效喷药宽度,m;v为作业速度,m/s。
在喷药机的实际操作中,有效喷药宽度是一定值;喷嘴瞬时流量Q与车辆的瞬时速度v成比例。因此,为了确保R达到预期值,必须确保Q和v在每个时刻具有不一致和成比例的关系。
本文设计的ARM反馈的变量喷药控制系统使用北斗采集的车辆的速度值v,根据计算目标流量QT,并通过流量传感器获得当前流量QM。QM等于反馈值。根据反馈值,控制器采取适当的策略改变比例电动阀的开度,从而改变管道内的液体流量,直到QT等于QM,并最终实现变量喷药操作。
为了保证良好的雾化效果,机组喷头锥角有一定的要求。普通喷嘴是110°双扇形喷嘴的雾角。基于基本要求,喷嘴间距大于或等于50cm,而喷杆高度通常比顶部高50cm。
有效喷洒宽度D(m)=[(m-1)L+2htanα] (2)
式中:m为喷嘴数量;L为相邻的2个喷嘴间距,m;h为喷嘴离地高度,m;α为喷嘴喷射角度。
2 系统硬件组件
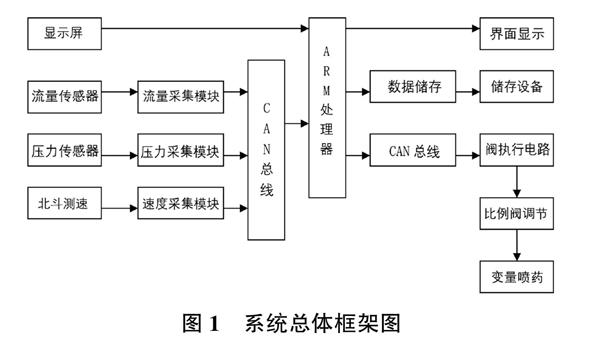
2.1 系统总体框架
变量喷药控制系统的总体框架如图1所示。变量喷药控制系统的主要结构是车载ARM控制器,CAN采集模块,CAN频率采集模块,速度传感器,流量传感器,压力传感器和比例电动调节阀。
2.2 ARM处理器
三核Exynos4412是四核CORTEX-A9架构处理器,被选为系统的核心处理器。采用Ubuntu14.04LTS作为操作系统,选择车速、管道流量、喷嘴压力等信号,计算出当前速度的理论喷药量,比较反馈信号,输出电动调节阀控制信号并存储实时数据。ARM处理器的外围电路包括Console串口、标准CAN2.0总线接口、标准HDMI接口和LCD扩展槽,用于调试、通信和显示。
2.3 传感器
2.3.1 流量传感器
采用涡轮电磁流量计进行流量采集,精度为±0.5级,测量范围为0~5m3/h,输出信号为隔离4~20mA电流信号。根据安装标准将电磁流量计安装在主管上,以测量系统中的液体流量。流量是用于反馈调节的可变喷药系统的主要参数之一。
2.3.2 压力传感器
使用压力传感器进行采集工作时的喷嘴压力,测量范围为0~5Mpa,输出信号为4~20mA电流信号,检测精度为±0.2%。扩散硅压力变送器安装在一般管道中,喷嘴前面和流量传感器后面的三通连接处,用于测量喷嘴处的压力值。在使用扇形的棕色喷嘴(No.5喷嘴)情况下,雾化效果更好,为0.2~0.5Mpa。因此,影响喷雾效果的喷嘴压力是在喷雾系统中收集的重要参数之一。
2.3.3 获取模块
采集模块用于采集传感器信号并将其转换为CAN信号,信号通过CAN总线发送到ARM控制器。有速度采集模块、流量模拟采集模块和压力测量模块,模块安装时附带适当的传感器。
2.3.4 比例电动调节阀
比例电动调节阀由阀体和直流调速电机组成。操作阀体阀芯改变其行程以改变通过阀体的最大流量,阀门的百分比流量与行程百分比成正比,阀马达的速度为3RPM,从完全关闭到完全打开只需5~6s。
3 变量喷药控制方法
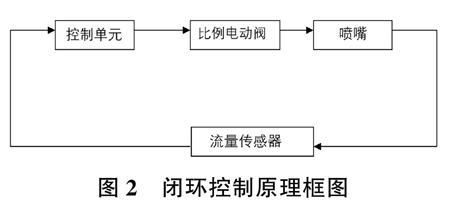
如图2为系统闭环控制的框图。在反馈调节中,反馈和延迟的测量精度对闭环系统的特性有显著影响。根据变量喷药控制系统的工作原理,反馈值由车速v和电流QM决定。选择合适的电磁流量计,以提高流量测量的准确性,减少电流测量过程中的响应时间。由于车辆的测量延迟可以忽略不计,系统延迟主要来自电动阀的调节。因此,控制器选择脉冲宽度调制策略以减少由阀门延迟引起的稳定时间。
4 系统软件设计
4.1 技术路线设计
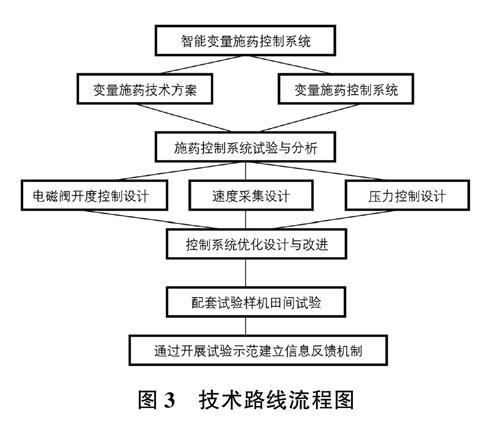
如图3所示,吸取国内外先进经验与创新思想,采用理论与实践,实验室研究与田间试验考核,产品开发、中试试验与示范推广紧密结合的方法,以智能变量喷药控制系统入手,按照确定的技术路线进行电磁阀开度控制、速度采集试验、压力控制研究与设计,并进行试制及试验示范。
4.2 通信协议的设计
车载ARM控制器、CAN采集模块及传感器等核心部件均通过CAN总线网络连接。CAN总线物理层和数据链路层符合CAN2.0B标准帧协议(CAN2.0兼容)。设计的功能代码在应用层消息的11位标识符中定义。ARM采用的Ubuntu操作系统使用Socket CAN来实现CAN总线通信。应用层主要功能代码的设计如表1所示。
图4为软件的界面,显示了主喷雾喷嘴压力、车速、流量信息、喷嘴数量、间距及工作状态。功能键包括参数设置,自动、手动模式,喷杆角度设置,喷杆上升、下降,喷杆展开、收起。界面可以方便地监测喷药机的运行状况,特殊情况下可以模拟打药模式。
5 测试与分析
不同速度的变量喷药操作试验:
所需的喷雾量R设定为300L/hm2,喷嘴的数量m为51,间距为50cm,地面间隙等于80cm。喷药机以不同的速度连续工作1min(不同的速度测试彼此独立,每个测试以零速开始),喷射的水量与喷雾量一样。根据存储在ARM中的操作数据,获得表2。
从表2可以看出,当车速为5~7km/h时,实际喷药量略大于理论喷药量;当车速为8~11km/h时,实际喷药量略小于理论喷药量。重复测试和观察,得出以下分析:当速度超过8km/h时,管道压力相对较大,回流阀起到稳定压力和限制最大压力的作用,将产生回流,导致喷嘴压力降低,使实际喷雾量略低于理论值。 当速度慢时,喷射量很小,而回流阀不起作用,泵提供的压力集中在喷嘴中,使实际喷雾略高于理论值。但是,在不同的速度下,系统不会超过喷药过程中喷药误差百分比的5%。
6 结论和展望
基于CAN总线的变量喷药控制系统以ARM处理器为核心设计与建立。控制系统接口旨在实现状态监控,自动变量控制和手动校正,以及作业数据存储功能;
根据变量喷药操作测试,可以得出结论:变量喷药系统的控制误差小于5%。稳定时间小于0.77s。并且满足可变喷药操作要求。
GPS定位技术等定位技术可应用于系统。因此,系统可以根据位置和处方图信息实时改变预期喷雾量R,从而实现根据处方图的可变喷雾操作。此外,可以在系统中增加DTU模块等长距离通信手段,实现数据的远程交互和变量喷药的远程控制。
参考文献
[1] 李志臣,饶洪辉,王勇,等.除草剂变量施药技术的研究现状与进展[J].东北农业大学学报,2007(04):563-567.
[2] 傅泽田,祁力钧,王俊红.精准施药技术研究进展与对策[J].农业机械学报,2007(1):189-192.
[3] 王利霞,张书慧,马成林,等.基于ARM的变量喷药控制系统设计[J].农业工程学报,2010,26(4):113-118.
[4]邱白晶,闫润,馬靖,等.变量喷雾技术研究进展分析[J].农业机械学报,2015,46(3):59-72.
[5] 魏新华,蒋杉,张进敏,等.脉宽调制间歇喷雾变量喷施系统施药量控[J].农业机械学报,2013,44(2):87-92,86.
[6] 蒋焕煜,周鸣川,童俊华,等.卡尔曼滤波的PWM 变量喷雾控制研究[J].农业机械学报,2014,45(10):60-65.
[7] 刘伟,汪小旵,丁为民,等.背负式喷雾器变量喷雾控制系统设计与特性分析[J].农业工程学报,2012,28(9):16-21.
[8] 蔡祥,Walgenbach Martin,Doerpmund Malte,等.基于电磁阀的喷嘴直接注入式农药喷洒系统[J].农业机械学报,2013,44(6): 69-72.
[9] 赵欣,张宝珍,赖维,等.针型喷嘴雾化特性的影响因素分析[J].轻工机械,2004(4):22-24.
[10] 李龙龙,何雄奎,宋坚利,等.果园仿形变量喷雾与常规风送喷雾性能对比试验[J].农业工程学报,2017,33(16):56-63.
(责任编辑 周康)
