
基于GO法的某型飞机电传操纵杆系统余度研究
2020-04-01 08:14段富海,马骏,张慕天,2
大连理工大学学报 2020年2期
段 富 海, 马 骏, 张 慕 天,2
( 1.大连理工大学 机械工程学院, 辽宁 大连 116024;2.上汽集团股份有限公司商用车技术中心, 上海 200438 )
0 引 言
飞机电传操纵系统是一种全时、全权限的飞行操纵系统,因具有操作精度高、体积小、战场生存能力高、易与导航控制系统交联等优点,已成为目前飞控系统的发展主流[1].
飞机电传操纵杆系统是飞机电传操纵系统的前端,其将飞行员的操纵愿望转变为电信号形式的操纵指令信息.电传操纵杆系统用电缆替代了钢索、滑轮等机械元件,操纵系统的重量体积大大减小,节省了系统设计、安装和调校时间.电传信号消除了机械操纵系统中的摩擦、间隙和非线性因素,改善了精微操纵信号的传递.电气组合简单,易于实现操纵杆与自动驾驶仪的结合.一般采用小侧杆操纵机构,可减轻飞行员工作负担,同时飞行员观察仪表的视线不再受传统中央驾驶杆影响.电传操纵杆系统依靠电信号传递指令,与控制增稳系统融为一体,飞机操稳特性得到根本改善[2-3].
飞机电传操纵杆系统在飞行员操控飞机飞行姿态和控制飞机按既定航道飞行等方面起着至关重要作用,其性能好坏对飞机飞行品质有着重要影响[4].因此,电传操纵杆系统可靠性和安全性备受飞机研制方和使用方的重视,是飞机系统可靠性设计的核心内容[5].目前,国际上对电传操纵系统可靠性指标要求通常为民用飞机每飞行小时1.0×10-10~1.0×10-9.按照目前技术水平,仅通过单套电传操纵系统达到系统可靠性指标要求具有很大难度.一般来说,单通道电传操纵系统只能够做到每飞行小时(1~2)×10-3,与传统机械操纵系统的可靠性指标差距较大[6-7].为达到国际通用的指标要求,使电传操纵系统可靠性超越传统机械操纵系统,在设计开发飞机操纵系统时普遍采用余度设计[8-9],即引入多重系统.现代飞机基本余度等级,以四余度和具有自监控能力的三余度方案最为常见,二者均可以实现双故障工作,其故障率均可降到每飞行小时1.0×10-9.但目前自监控能力有待改善,所以民航飞机上首选按比较监控的方式进行监控的四余度方案.
GO法是美国军方20世纪60年代首先提出,用于分析武器系统可靠性的一种有效方法,特别适用于有电流、气流、液流等实际物流产生的多状态复杂系统可靠性分析[10].GO法用GO操作符和信号流描述系统,依据其状态概率组合法或概率公式法进行系统可靠度概率计算并定性定量分析[11],得到广泛应用和发展,且功能逐渐完善,使用更加简捷[12-13].
余度技术在航空领域应用广泛,是提高系统可靠性、安全性的有效措施[14-16].余度技术一般通过并联方式,增加可靠性较低组件数目,组成高可靠性系统,从而降低系统故障层级[17].然而系统余度过大,会造成系统组件数目过多,使得系统结构过于复杂,导致重量、经济性等方面不能达到理想水平.通过GO法定量分析飞机电传操纵杆系统可靠性,提出最佳余度配置方案并在电传操纵杆系统中对关键组件采用余度设计,既能提高电传操纵杆系统的可靠性又可以降低成本,提高整个飞机的可靠性.
1 电传操纵杆系统结构原理
电传操纵杆系统(图1)主要由监控计算机、控制执行装置和侧杆手柄3部分组成.控制执行装置主要由力矩电机、传动齿轮、行星减速器、旋转式电位器、力传感器和各种电路模块组成.其中力矩电机主要作用是驱动侧杆手柄旋转并为侧杆手柄提供反馈力.因主动侧杆机架设计尺寸较小,而小体积的力矩电机所提供的杆力一般较小,不能满足设计要求,因此需要与行星减速器连接以便增大加载机构的力矩.霍尔电流传感器主要作用是测量力矩电机的电流,然后将结果输入微控制器.编码器与力矩电机的输出轴连接,主要作用是将力矩电机的角位移信号转换为电信号,并将结果输入微控制器,从而得到侧杆的角速度.旋转式电位器通过驾驶杆和侧杆手柄相连,用于测量飞机驾驶员操纵驾驶杆时手柄的偏转角度.力传感器和驾驶杆相连,用于测量飞机驾驶员操纵驾驶杆时力的大小.PWM电机驱动模块主要作用是接收微控制器的控制信号并进行放大,从而驱动力矩电机运转.微控制器主要作用是接收反馈的手柄力信号、手柄角位移信号、手柄速度信号、霍尔电流传感器电流信号,通过相关算法进行处理,得出预期的电机转速和转矩大小,然后输出控制电流实现对侧杆手柄的反馈控制.
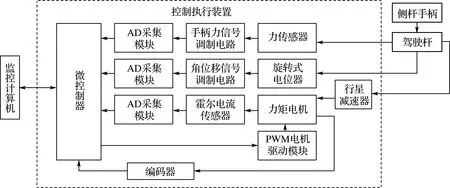
图1 某型飞机电传操纵杆系统原理图
2 电传操纵杆系统组件余度分析设计方法
2.1 电传操纵杆系统的GO图建模
令电机模块余度为M1,编码器模块余度为M2,电流检测模块余度为M3,减速器模块余度为M4,位移检测模块余度为M5,力感模块余度为M6,微控制器模块余度为M7.按照GO法中GO图的构建规则,得到余度电传操纵杆系统的GO图,如图2所示.
图2中,操作符12、13分别和操作符14、15构成电机模块;操作符18、19分别和操作符20、21构成电流检测模块;操作符24、25分别和操作符26、27以及操作符28、29构成位移检测模块;操作符30、31分别和操作符32、33以及操作符34、35构成力感模块.可将各模块的可靠性数据计算出后,用一个操作符进行替代,从而对余度电传操纵杆系统进行简化,以便更好地进行后续分析,简化后余度电传操纵杆系统GO图如图3所示.
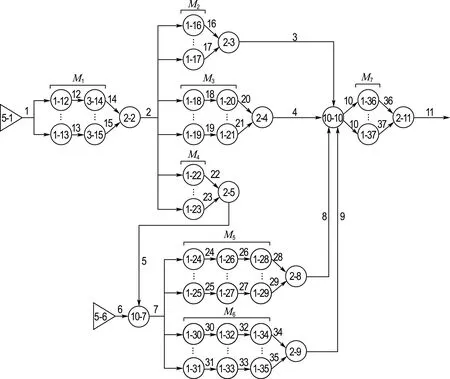
图2 某型飞机电传操纵杆系统余度GO图
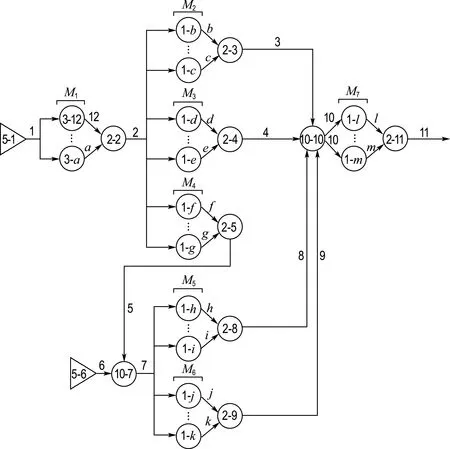
图3 某型飞机电传操纵杆系统双余度简化GO图
根据现有文献、工程经验和专家知识[18-19],表1给出了电传操纵杆系统各模块的状态概率,其中状态值0、状态值1和状态值2分别为各模块的提前状态、工作状态和故障状态;P0、P1分别为各个模块提前状态概率和工作状态概率.
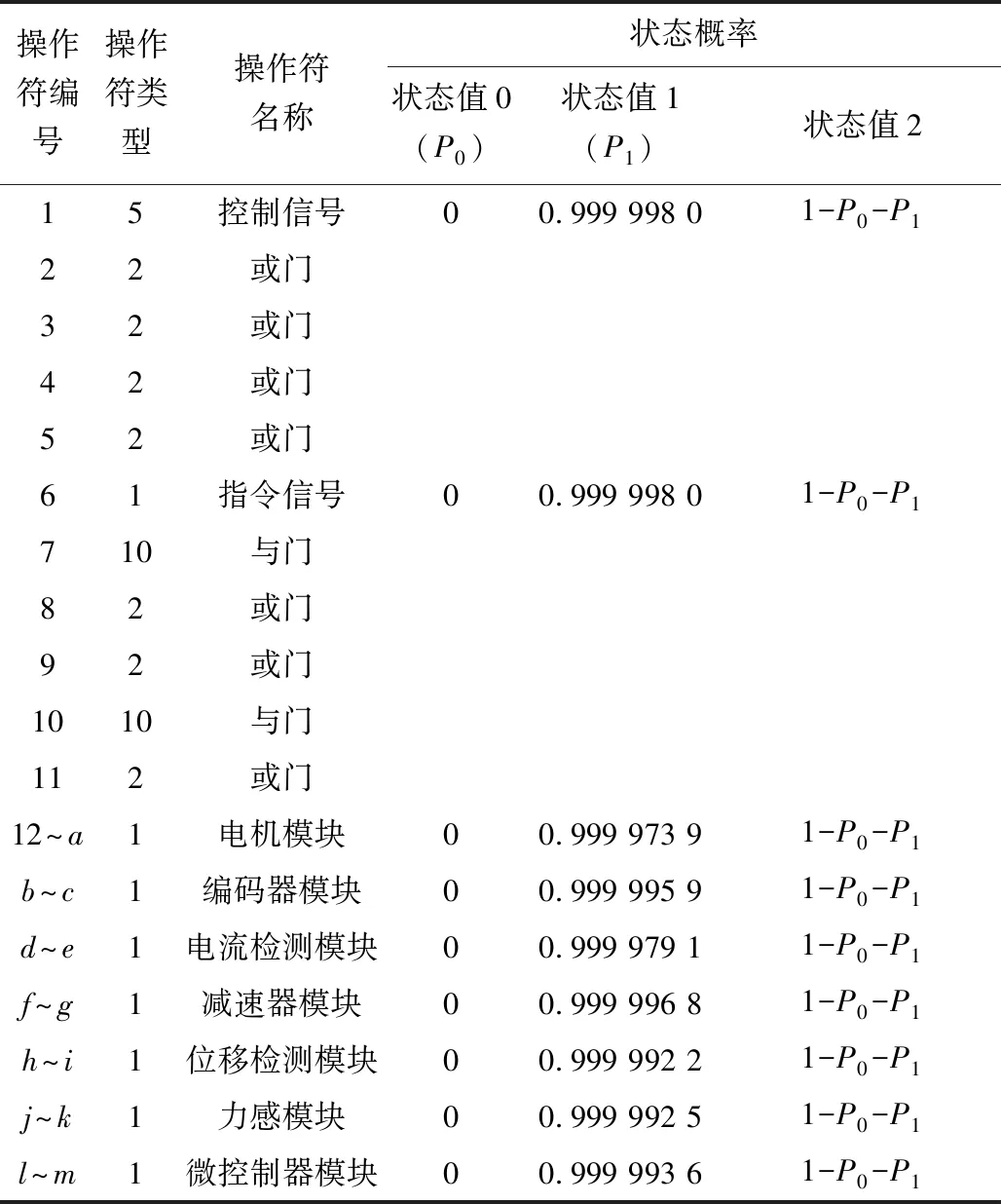
表1 某型飞机电传操纵杆系统各模块可靠度值
2.2 电传操纵杆系统GO运算
运用状态累积概率算法进行GO运算,根据电传操纵系统的信号流流向依次对各关键信号流进行可靠性计算.
(1)信号流12~a
操作符12~a是触发发生器操作符,其概率分布都相同,因此仅计算信号流a,计算公式为
Ara(0)=Pca(0)+Asa(0)Pca(1)=Xa-0
(1)
Ara(1)=Pca(0)+Asa(1)Pca(1)=
Xa-0+X1-1Xa-1
(2)
Pra(0)=Ara(0)=Xa-0
(3)
Pra(1)=Ara(1)-Ara(0)=X1-1Xa-1
(4)
(2)包含余度参数的信号流2
操作符2是或门逻辑操作符,共有M1个输入信号,共有信号为信号流1,计算公式为
1-(1-Xa-0)M1
(5)
1-[1-As2(1)Xa-1]M1
(6)
对其进行共有信号修正可得:
Ar2(0)=1-(1-Xa-0)M1
(7)
Ar2(1)=1-(1-Xa-0)M1+
(8)
Pr2(0)=Ar2(0)=1-(1-Xa-0)M1
(9)
Pr2(1)=Ar2(1)-Ar2(0)=
(10)
(3)信号流b~c
操作符b~c是两状态单元操作符,其概率分布都相同,因此仅计算信号流b,计算公式为
Arb(0)=Asb(0)Pcb(1)=
Xb-1-(1-Xa-0)M1Xb-1
(11)
Arb(1)=Asb(1)Pcb(1)=
Xb-1-(1-Xa-0)M1Xb-1+
(12)
Prb(0)=Arb(0)=Xb-1-(1-Xa-0)M1Xb-1
(13)
Prb(1)=Arb(1)-Arb(0)=
(14)
(4)包含余度参数的信号流3
操作符3是或门逻辑操作符,共有M2个输入信号,共有信号为信号流2,计算公式为
1-[1-Xb-1+(1-Xa-0)M1Xb-1]M2
(15)
1-[1-Ar2(1)Xb-1]M2
(16)
对其进行共有信号修正可得:
(17)
(18)
Pr3(0)=Ar3(0)=
(19)
Pr3(1)=Ar3(1)-Ar3(0)=
(20)
(5)信号流d~e
操作符d~e是两状态单元操作符,其概率分布都相同,因此仅计算信号流d,计算公式为
Ard(0)=Asd(0)Pcd(1)=
Xd-1-(1-Xa-0)M1Xd-1
(21)
Ard(1)=Asd(1)Pcd(1)=
Xd-1-(1-Xa-0)M1Xd-1+
(22)
Prd(0)=Ard(0)=Xd-1-(1-Xa-0)M1Xd-1
(23)
Prd(1)=Ard(1)-Ard(0)=
(24)
(6)包含余度参数的信号流4
操作符4是或门逻辑操作符,共有M3个输入信号,共有信号为信号流2,计算公式为
1-[1-Xd-1+(1-Xa-0)M1Xd-1]M3
(25)
1-[1-Ar2(1)Xd-1]M3
(26)
对其进行共有信号修正可得:
(27)
(28)
(29)
Pr4(1)=Ar4(1)-Ar4(0)=
(30)
(7)信号流f~g
操作符f~g是两状态单元操作符,其概率分布都相同,因此仅计算信号流f,计算公式为
Arf(0)=Asf(0)Pcf(1)=
Xf-1-(1-Xa-0)M1Xf-1
(31)
Arf(1)=Asf(1)Pcf(1)=
Xf-1-(1-Xa-0)M1Xf-1+
(32)
Prf(0)=Arf(0)=Xf-1-(1-Xa-0)M1Xf-1
(33)
Prf(1)=Arf(1)-Arf(0)=
(34)
(8)包含余度参数的信号流5
操作符5是或门逻辑操作符,共有M4个输入信号,共有信号为信号流2,计算公式为

1-[1-Xf-1+(1-Xa-0)M1Xf-1]M4
(35)
1-[1-Ar2(1)Xf-1]M4
(36)
对其进行共有信号修正可得:
(37)
(38)
Pr5(0)=Ar5(0)=
(39)
Pr5(1)=Ar5(1)-Ar5(0)=
(40)
(9)包含余度参数的信号流7
操作符7是与门逻辑操作符,共有2个输入信号,计算公式为
Ar7(0)=Ar5(0)Ar6(0)=0
(41)
Ar7(1)=Ar5(1)Ar6(1)=
(42)
Pr7(0)=Ar7(0)=0
(43)
Pr7(1)=Ar7(1)-Ar7(0)=
(44)
(10)信号流h~i
操作符h~i是两状态单元操作符,其概率分布都相同,因此仅计算信号流h,计算公式为
Arh(0)=Ash(0)Pch(1)=0
(45)
Arh(1)=Ash(1)Pch(1)=
[1-(1-Xa-0)M1]×
(46)
Prh(0)=Arh(0)=0
(47)
Prh(1)=Arh(1)-Arh(0)=
[1-(1-Xa-0)M1]×
(48)
(11)包含余度参数的信号流8
操作符8是或门逻辑操作符,共有M5个输入信号,共有信号为信号流7,计算公式为
(49)
(50)
对其进行共有信号修正可得:
Ar8(0)=0
(51)
Ar8(1)=[1-(1-Xa-0)M1]×
(52)
Pr8(0)=Ar8(0)=0
(53)
Pr8(1)=Ar8(1)-Ar8(0)=
[1-(1-Xa-0)M1]×
(54)
(12)信号流j~k
操作符j~k是两状态单元操作符,其概率分布都相同,因此仅计算信号流j,计算公式为
Arj(0)=Asj(0)Pcj(1)=0
(55)
Arj(1)=Asj(1)Pcj(1)=
[1-(1-Xa-0)M1]×
(56)
Prj(0)=Arj(0)=0
(57)
Prj(1)=Arj(1)-Arj(0)=
[1-(1-Xa-0)M1]×
(58)
(13)包含余度参数的信号流9
操作符9是或门逻辑操作符,共有M6个输入信号,共有信号为信号流7,计算公式为
(59)
(60)
对其进行共有信号修正可得:
Ar9(0)=0
(61)
Ar9(1)=[1-(1-Xa-0)M1]×
(62)
Pr9(0)=Ar9(0)=0
(63)
Pr9(1)=Ar9(1)-Ar9(0)=
[1-(1-Xa-0)M1]×
(64)
(14)包含余度参数的信号流10
操作符10是与门逻辑操作符,共有4个输入信号,共有信号为信号流2和信号流7,计算公式为
Ar10(0)=Ar3(0)Ar4(0)Ar8(0)Ar9(0)=0
(65)
Ar10(1)=Ar3(1)Ar4(1)Ar8(1)Ar9(1)=
{[1-(1-Xa-0)M1]×
{[1-(1-Xa-0)M1]×
{[1-(1-Xa-0)M1]+
(66)
对其进行共有信号修正可得:
Ar10(0)=0
(67)
Ar10(1)={[1-(1-Xa-0)M1]+
(68)
(15)信号流l~m
操作符l~m是两状态单元操作符,其概率分布都相同,因此仅计算信号流l,计算公式为
Arl(0)=Asl(0)Pcl(1)=0
(69)
Arl(1)=Asl(1)Pcl(1)=
{[1-(1-Xa-0)M1]+X1-1×
(70)
Prl(0)=Arl(0)=0
(71)
Prl(1)=Arl(1)-Arl(0)=
{[1-(1-Xa-0)M1]+
(72)
(16)包含余度参数的信号流11
操作符11是或门逻辑操作符,共有M7个输入信号,共有信号为信号流10,计算公式为
(73)
(74)
对其进行共有信号修正可得:
Ar11(0)=0
(75)
Ar11(1)={[1-(1-Xa-0)M1]+
(76)
式中:Arw(t)为信号流w输出状态为t时的状态累积概率;Asw(t)为信号流w输入状态为t时的状态累积概率;Prw(t)为信号流w输出状态为t时的状态概率;Psw(t)为信号流w输入状态为t时的状态概率;Pcw(t)为信号流w操作符状态为t时的概率;Xv-t为操作符v状态为t时的概率.
2.3 电传操纵杆系统组件余度设计方法
信号流11是电传操纵杆系统的输出信号,可以通过对信号流11进行可靠性分析,从而进行余度设计.
通过式(76)分别对各余度变量求一阶和二阶导数.对M1求一阶和二阶导数,得:
X1-1[(1-Xa-0)M1ln(1-Xa-0)-
(77)
X1-1[(1-Xa-0)M1ln2(1-Xa-0)-
(78)
通过运用Matlab分析可知,M1的一阶导数恒大于0,M1的二阶导数恒小于0.
对M2求一阶和二阶导数,得:
{[1-(1-Xa-0)M1]+X1-1×
(79)
{[1-(1-Xa-0)M1]+X1-1×
(80)
通过运用Matlab分析可知,各组件余度算式的一阶导数恒大于0,因此系统输出的可靠度与系统各组件余度成正比.又因为它们的二阶导数均小于0,因此系统输出可靠度的增长幅值与系统各组件余度成反比.故通过分析电传操纵杆系统可靠度的增长幅值,可以得出一个较优的余度设计结果,余度高于该设计的可靠性结果对电传操纵杆系统可靠度优化贡献较小,不予采纳.
3 设计算例与结果分析
3.1 设计算例
设飞机电传操纵杆系统7个余度变量参数的初值为1,计算得到可靠度函数为f(1,1,1,1,1,1,1)=0.999 935 001 769 910;然后按照循环算法将7个变量值依次增加1,求出每个可靠度与比较初值的差值,即每个可靠度增长幅值.将可靠度增长幅值中的最大值提取出来,作为下次运算的初值,如f(1,1,2,1,1,1,1)=0.999 955 900 411 450;依次循环计算,直到增长幅值小于1.0×10-9结束,详细计算过程如表2所示.
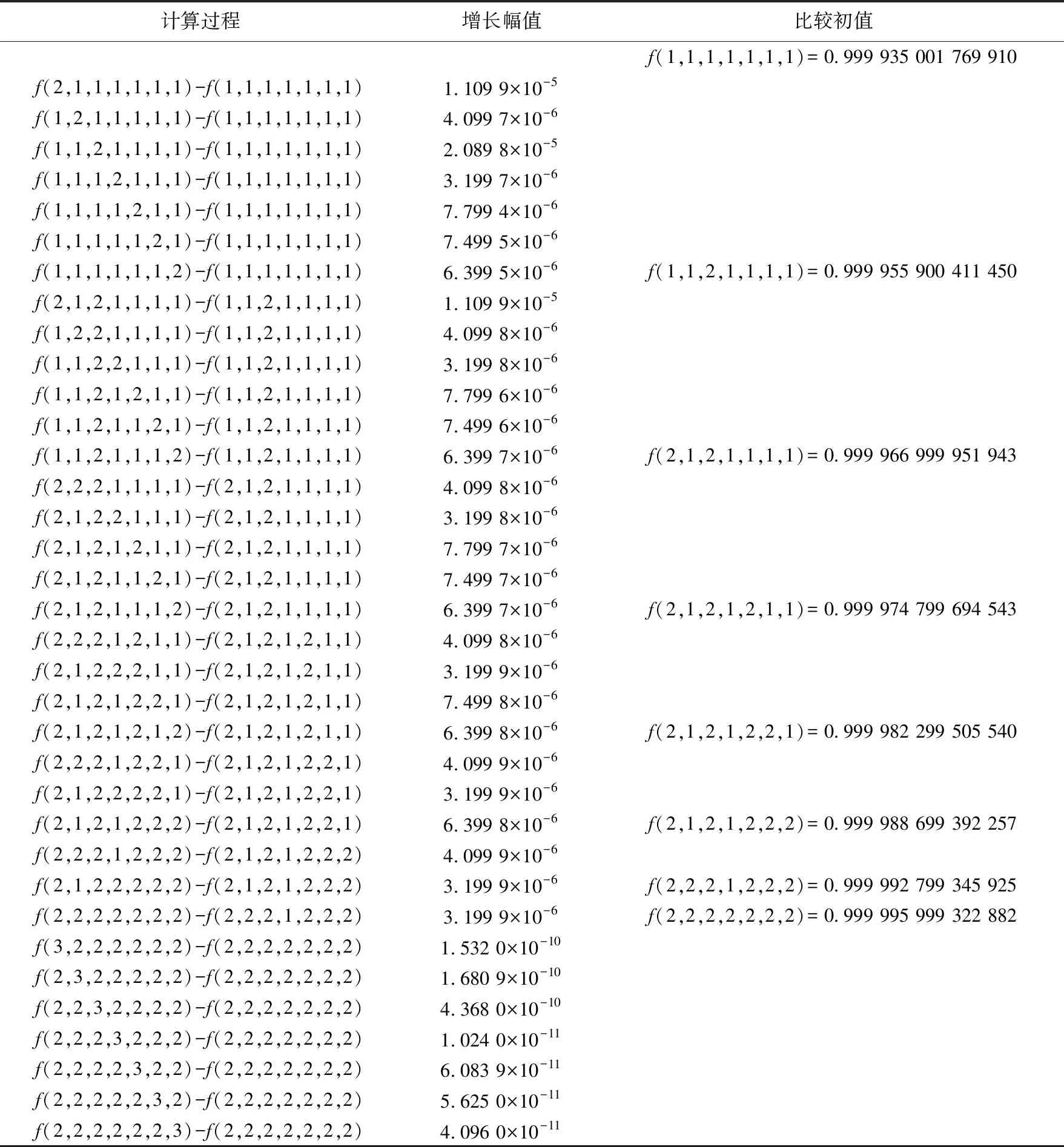
表2 可靠度增长幅值
3.2 结果分析
飞机电传操纵杆系统复杂度高,其可靠性余度设计方法也相应复杂,但从上述计算分析过程可知,基于GO法的余度设计方法计算过程简便,能较快得出余度设计参数.由表2可知,电传操纵杆系统组件余度越大,其可靠度越高,当计算到f(2,2,2,2,2,2,2)=0.999 995 999 322 882作为初值时,电传操纵杆系统组件余度的变量值继续增大,但该组件余度下的可靠度较f(2,2,2,2,2,2,2)的增长幅值均小于1.0×10-9,若再提高电传操纵杆系统组件余度,对其可靠度提高贡献不大.所以电传操纵杆系统组件最佳余度组合应为M1=M2=M3=M4=M5=M6=M7=2,即电机模块、编码器模块、电流检测模块、减速器模块、位移检测模块、力感模块、微控制器模块均采用双余度设计,此时得到双余度电传操纵杆系统的可靠度为0.999 995 999 322 882.
4 结 论
(1)针对复杂的飞机电传操纵杆系统,基于GO法的余度设计方法是有效的,且计算过程简便,能较快得出余度设计参数.
(2)对某型飞机电传操纵杆系统进行了组件余度设计,可以在最小的组件余度下保证较好的可靠度,在目前元器件可靠性水平下,可使单个电传操纵杆系统可靠度达到每飞行小时1.0×10-6,能够提高电传操纵杆系统可靠性,为电传操纵杆系统结构设计提供了参考.
(3)飞机电传操纵系统采用两套余度电传操纵杆系统即可满足一般飞机每飞行小时1.0×10-9可靠度要求.在余度较小的情况下,简化了连接关系,减小了系统重量,提高了系统可靠性、安全性,对飞机电传操纵系统设计有一定的指导意义.
猜你喜欢
工业设计(2022年9期)2022-10-13
防爆电机(2022年4期)2022-08-17
舰船科学技术(2022年10期)2022-06-17
儿童文学选刊(2019年2期)2019-09-10
农机使用与维修(2018年5期)2018-07-05
高中生学习·高二版(2017年9期)2017-10-25
电子技术与软件工程(2016年24期)2017-02-23
科技与创新(2016年20期)2016-11-25
中小企业管理与科技·下旬刊(2016年4期)2016-11-19
考试周刊(2016年44期)2016-06-21
