
反舰导弹“双一”攻击最大攻击角计算方法*
2020-04-02 03:23罗木生王培源
火力与指挥控制 2020年2期
罗木生,吴 铭,王培源
(海军航空大学,山东 烟台 264001)
0 引言
反舰导弹多方向攻击水面舰艇目标,是提高突防概率、实施饱和攻击的重要方式,尤其是在“双一”攻击作战中。所谓“双一”攻击,是指从同一个发射阵位、多方向打击同一个目标。具有航路规划功能的反舰导弹,能够实施“双一”攻击,使得搭载平台不需从多个阵位协同发射,既降低了指挥协同的复杂度;同时,也有利于提高打击的快速性和突然性。
反舰导弹最大攻击角,是“双一”攻击作战中的重要决策依据,制约着多方向打击时攻击角的取值范围。当前的研究,主要是从攻击角制约下的反舰导弹综合作战能力[1]、捕捉概率[2]、航路选择[3]等方面展开。尤其是在反舰导弹航路规划方面,以攻击角为输入,研究了协同攻击多目标[4-5]、饱和攻击[6-7]、威胁规避[8]等条件下的航路规划决策过程[9]、规划方法[10-12]、规划算法[13-17]与重规划[18]等问题,取得了较多成果。但是缺乏关于攻击角取值范围、最大攻击角定量计算方法和计算模型的研究。本文将建立双目标、多约束下的最大攻击角解算模型,以期提供有效的计算方法支撑“双一”攻击作战中反舰导弹的运用决策。
1 反舰导弹“双一”攻击最大攻击角描述
在“双一”攻击中,反舰导弹可以采取不同的飞行航路,以不同的攻击角,从多方向对目标实施打击。如图1 所示。
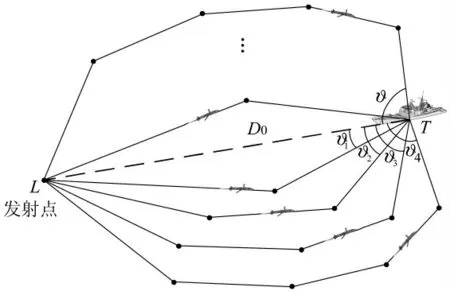
图1 反舰导弹不同航路的攻击角
攻击角,是指反舰导弹航路飞行结束,开启末制导雷达实施搜索时的飞行方向相对水面舰艇目标的舷角,用ϑ 表示。通常规定反舰导弹位于水面舰艇目标左舷,攻击角为负值;右舷为正值,因而有ϑ∈[-180°,180°]。
由于导弹与目标的距离、导弹动力航程、航路点数量等因素的制约,反舰导弹的攻击角通常并不能为-180°~180°范围内的任意角度,而是不能超过最大攻击角(或负值时为最小攻击角)。因此,“双一”攻击中制订多方向攻击的前提是解算出反舰导弹的最大攻击角。
2 反舰导弹“双一”攻击最大攻击角双目标规划方法
设反舰导弹发射点位于L 点,目标位于T 点,两者的水平直线距离为D0,如图2 所示。反舰导弹飞行航路上设置了n 个航路点,分别为P1、P2、…、Pn。
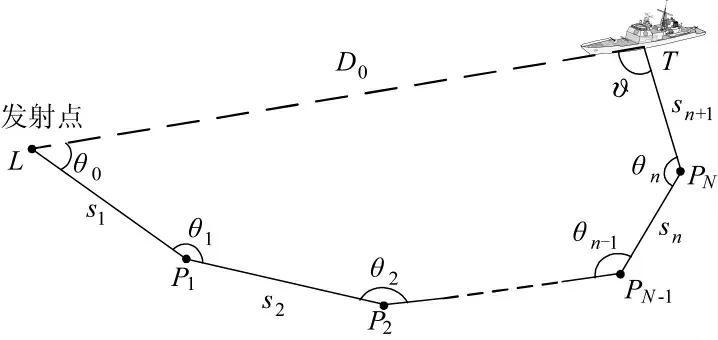
图2 反舰导弹飞行航路与攻击角
为简化描述,设发射点位于水面舰艇目标正前方,且令ϑ∈[0°,360°],那么当ϑ>180°时属于左舷。实际上,发射点通常并不在水面舰艇目标正前方,则可先旋转水面舰艇目标方位使之满足,求解结束后再进行逆旋转操作即可。
2.1 目标函数模型
最大攻击角越大,可实现更多的导弹从更多方向上进行攻击。同时,考虑到航路点越多,反舰导弹航程将增加,而且导弹自控终点的误差将增大。因此,目标函数为:攻击角ϑ 最大时航程RMis最短,即

2.1.1 导弹攻击角计算模型
反舰导弹飞行航路、发射点L 与目标点E 连线构成了一个封闭的多边形,令θi(i=1,2,…,n)表示各航路点转弯角,即多边形各顶点的内角,有θi∈[0°,360°]。因此,多边形内角和ΦT的计算公式为

式中,θ0表示发射偏角,即反舰导弹发射点指向第1个航路点与发射点指向目标点之间的夹角。
根据多边形内角和与顶点关系的特性,有

由式(2)与式(3)可解算得

2.1.2 导弹飞行航程计算模型
反舰导弹的航程RMis为飞行航路路程之和。若忽略反舰导弹在各航路点的转弯飞行,则有

式中,s1表示发射点与第1 个航路点之间的距离;si(i=2,3,…,n)表示第i-1 个与第i 个航路点之间的距离;sn+1表示第n 个(最后一个)航路点与目标之间的水平距离。
实际上,反舰导弹过航路点的飞行航迹如图3所示。在到达航路点Pi前的Ei点,反舰导弹开始转弯至Fi结束,不过航路点Pi直接飞向下一段航路。其中,Ei、Fi点分别为对应两条路径与圆的切点。
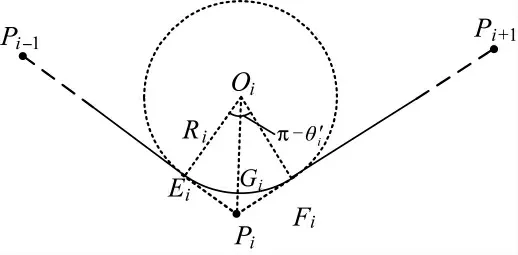
图3 反舰导弹过航路点的飞行航路
因此,在过航路点Pi时,忽略转弯飞行与考虑转弯飞行,反舰导弹的航程差ΔSi为
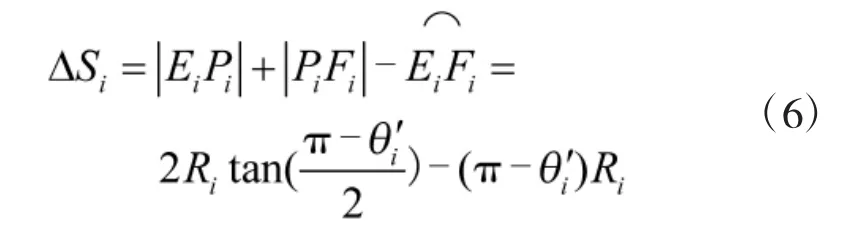
式中,Ri表示反舰导弹的转弯半径;表示转弯角θi的弧度值,即。
由式(5)和式(6)可解算得反舰导弹的实际航程为

2.2 导弹飞行航路约束建模
反舰导弹飞行航路的航路点数量、转弯角、航路点间距、航程等因素对最大攻击角的均有较大影响。
2.2.1 航路点数量
一般来说,反舰导弹在其设计过程中便确定了每条航路上航路点数量的最大值N0。不同类型的反舰导弹,N0的取值有所不同。显然,在规划反舰导弹飞行航路时,需满足

2.2.2 航路点转弯角
考虑到反舰导弹转弯半径通常较大,在各航路点上一般不进行大角度转弯,即,航路点转弯角应接近于180°。设θmin表示反舰导弹最小允许的转弯角。那么,航路点转弯角需满足

2.2.3 航路点间距离
反舰导弹发射起飞后,需经过一段距离的飞行后才能进入稳定飞行。因此,第1 个航路点与发射点的水平距离不得小于最小值sstart。则有

发射起飞后,反舰导弹通常需要爬升或降高飞行,因而导弹实际飞行的路程要大于水平距离。
为了能够顺利完成转弯、转向,相邻航路点之间的距离不能太小。令scent表示相邻航路点之间的最小水平距离,则有

为了实现反舰导弹末制导雷达开机后对预定海区的稳定搜捕,最后一个航路点与目标的水平距离不能小于最小值send。则有

2.2.4 航程
受最大航程Rmax的制约,反舰导弹飞行航路的路程RMis需满足

式中,κ 表示航程系数,满足κ∈(0,1];考虑到反舰导弹飞行过程中的爬升、降高、转弯等机动,并留有一定的裕度,可取0.95~0.99。
2.3 航路点间距与航路点转弯角的关系
令发射点与第i(i=1,2,…,n)个航路点之间的水平直线距离为di,则d1=s1;发射点与目标T 之间的距离为di+1,则有di+1=D0。如图4 所示。
图4 航路点间距离与航路点转弯角关系
由图4 可知,第i(i=1,2,…,n)个航路点的转弯角包括两部分,令

在由发射点与第i、i+1 个航路点构成的三角形中,根据余弦定理,有

在由发射点与第i、i-1 个航路点构成的三角形中,根据余弦定理,有

在由发射点与第n 个航路点、目标T 构成的三角形中,根据余弦定理,可解算得攻击角,即

3 仿真分析
以反舰导弹发射阵位为坐标系原点,设水面舰艇目标位于X 轴正方向距原点300 km;以巡航速速飞行时,转为半径为5 km;发射点与第1 个航路点的距离、航路点之间的距离、最后一个航路点与目标的距离均不得小于50 km;θmin为140°;最多可设置6 个航路点。采用蚁群算法,在Matlab 中编程解算。
3.1 航路点数量确定时的最大攻击角
若反舰导弹的航路只能设置3 个航路点,可得仿真结果如表1 所示,对应的航路如图5 所示。
表1 最大攻击角仿真结果(3 个航路点)
由表1 可知,若只设置3 个航路点,则最大攻击角为92.20°;那么,反舰导弹的攻击角可设置为0°~92.20°之间的任意值。若从目标左右两舷实施攻击,则攻击角的取值区间为-92.20°~92.20°;若超出此范围,则无法实现。再者,若反舰导弹的射程不到400 km,小于所需的403.98 km,则攻击角也达不到92.20°。
3.2 航路点数量变化时的最大攻击角
改变航路点的数量进行仿真,可得如图6 所示的仿真结果。

图6 最大攻击角随航路点个数而变化
由图6 可知,随着航路点个数的增加,反舰导弹的最大攻击角迅速增加。当航路点数量为5 个时,最大攻击角达到了171.52°;若需对目标实施全方位攻击,则至少需要设置6 个航路点。
航路点的增加,使反舰导弹攻击角的选择范围更大;但同时对导弹的航程提出了更高要求。例如:设置5 个航路点、攻击角为171.52°时,所需最小航程达到了609.23 km,是发射距离的2 倍还多。可见攻击角的增加是以牺牲导弹航程为代价的。
4 结论
“双一”攻击以其单点发射、多方向攻击的独特优势,已成为反舰导弹作战运用的首选方式。针对多方向协同攻击中的关键决策参数,提出了反舰导弹最大攻击角双目标规划方法。通过建模与仿真计算表明:
1)反舰导弹最大攻击角受航路点数量的制约,并随着航路点数量的增加而增大;
2)最大攻击角的增加,需要反舰导弹具有更大的航程。也就是说,过度追求大攻击角,将难以发挥导弹的射程优势。因此,在满足任务要求和战术协同的条件下,攻击角应越小越好。
可见本文提出的方法和建立的模型,较好地解决了多约束条件、不同航路点数量下的最大攻击角的计算问题,可为反舰导弹协同攻击中各航路攻击角的制订、航路点数量的设置提供决策依据和参考。
猜你喜欢
小哥白尼(军事科学)(2022年7期)2022-09-20
火力与指挥控制(2022年2期)2022-03-23
舰船电子工程(2021年6期)2021-06-28
科学与财富(2021年34期)2021-05-10
导航定位与授时(2020年1期)2020-02-18
电子技术与软件工程(2020年7期)2020-02-05
海峡姐妹(2019年5期)2019-06-18
无人机(2018年2期)2018-09-10
电子技术与软件工程(2018年7期)2018-02-25
兵器知识(2017年10期)2017-10-19
