振动影响航空TDICCD相机像质的集成分析
2020-04-08 04:47孙宝玉王俊强林洁琼
激光与红外 2020年3期
孙宝玉,王俊强,谷 岩,林洁琼
(长春工业大学机电工程学院,吉林 长春 130012)
1 引 言
近年来,在农业、公共安全和军事领域航空相机被广泛应用。TDI(Time Delay and Integration)工作模式CCD通过延迟积分的方式收集信号电荷,在灵敏度、信噪比及分辨率等方面具有独特优势,被广泛应用在航空遥感领域[1]。航空相机在工作过程中会受到外部风阻、内部光电载荷运动以及载机产生的振动,其中对航空相机光学性能影响最为严重的是载机振动[2]。在航空相机光学系统成像中,这些振动会造成各光学元件内部或光学元件相互之间产生微小的位移,使成像模糊,光学性能降低[3-12]。这一问题随着航空相机分辨率的需求不断提高而日益明显,成为航空相机发展中亟待解决的问题。光机集成分析将航空相机的光学系统和机械系统作为一个整体,对光学、机械之间的相互作用进行综合分析,并运用CAE技术以及光学设计软件对系统整体进行设计和优化[13-15]。
本文对项目研发的某航空相机,采用光机集成建模分析方法,对其成像质量在受到振动激励影响后的变化程度进行研究。建立航空相机光机系统的集成分析模型,对其进行结构有限元分析,得到其在振动激励作用下的光学元件微位移,以Fringe Zernike多项式为接口文件对分析结果进行拟合,将拟合后的数据输入到光学设计软件中进行光学分析,最后以MTF和像点点列图为评价指标,对振动造成的成像性能影响程度进行评价。
2 航空相机有限元模型的建立
航空相机的光机系统在受到振动载荷激励后,其内部光学元件会发生刚体位移和表面畸变,航空相机的离轴、离焦和倾斜会受到刚体位移的影响,航空相机的相差会受到表面畸变的影响。通过结构有限元分析可以得到刚体位移和表面畸变的原始数据,然后通过转换接口对数据进行处理,进而利用光学软件进行光学性能评价。通过光学分析软件分析得到的数据,即可对光学系统的成像性能在受到振动激励后的变化程度进行评价,同时可以对航空相机的设计和装调进行指导。在光机集成分析中,机械结构的有限元分析和光学系统的光学分析之间的数据转换是极其重要的一环,一个好的数据转换接口直接影响到分析结果的精确度,综合考虑,选择Fringe Zernike多项式作为此案例的数据转换接口[16-17],具体分析流程如图1所示。
为了研究振动对航空相机光学系统成像质量的影响,以项目研发的某航空相机的光机系统为研究对象,对光机系统的光学性能在受到外界振动载荷激励作用后的变化程度进行分析。航空相机结构如图2所示。
图2 航空相机实物
该航空相机为针对在复杂工作环境中提高光机部件的成像性能而特别研发。相机由6组镜片组成光路系统,其中第4个镜面为非球面,镜片与镜头之间采用挡圈刚性连接,镜头与镜筒通过4个均匀分布的螺钉连接,镜筒通过内接口与底座套紧并用螺钉固定,CCD通过螺钉与转接板固定连接,转接板通过螺栓与底座固定连接。根据航空相机实物设计尺寸要求建立三维模型如图3所示。
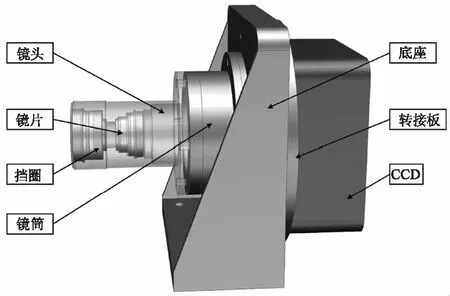
图3 航空相机结构三维模型
利用有限元分析软件建立光机系统的有限元模型如图4所示,整个模型共计302809个单元。
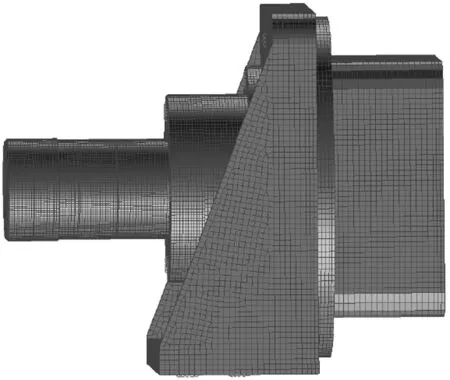
图4 航空相机有限元模型
3 航空相机光机系统的集成分析
3.1 航空相机的振动响应分析
振动对光学系统成像质量的影响主要现在光学元器件间相对位置发生改变。这种位置变化包括相对位置的平移、倾斜以及面形变化。无论何种变化都将改变光路,最终对航空相机光学系统的成像性能产生影响。为得到这些变化,需对该航空相机有限元模型进行动力学分析。
1)模态分析
为得到该航空相机光机系统的固有频率及其各阶振型,对该航空相机光机系统进行模态分析。航空相机光机系统的前2阶模态振型如图5所示,表1为光机系统的前6阶自然频率和振型描述。
从航空相机的模态振型图可以看出,其镜头和CCD部分抗振性能较差,需提高减振性能。六阶模态CCD部分振型摆动较大,但其频率已达到2380.8 Hz,已远超出航空相机的正常工作频率,对成像性能影响不大,在后期优化过程中可以考虑增加转接板的厚度或更换刚度更大的材料。
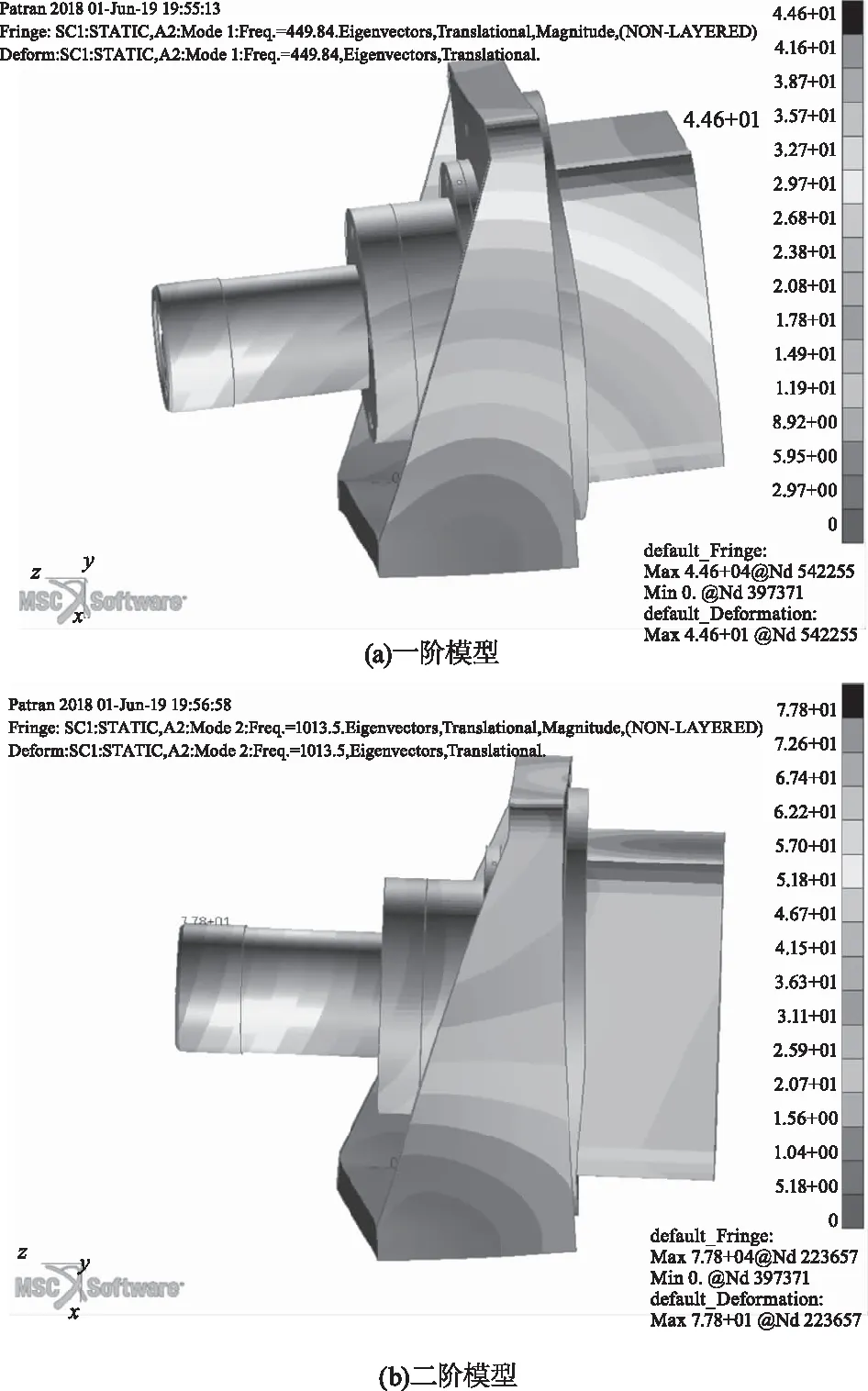
图5 航空相机模态分析
表1 模态分析结果
Tab.1 The results of modal analysis
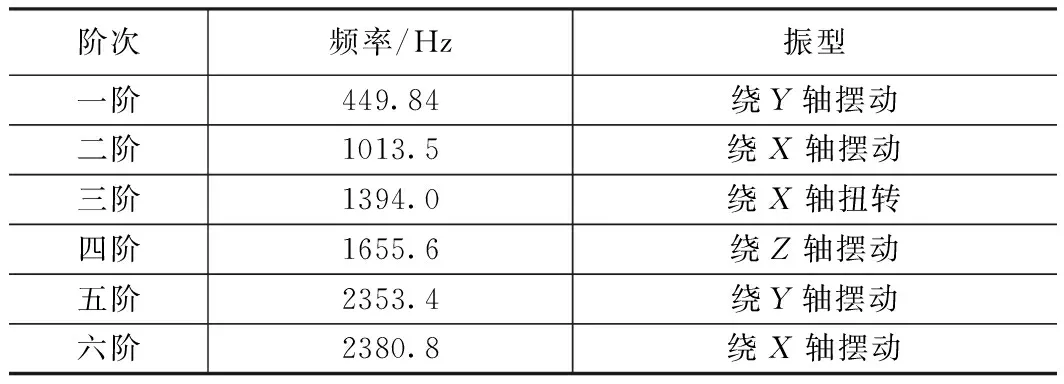
阶次频率/Hz振型一阶449.84绕Y轴摆动二阶1013.5绕X轴摆动三阶1394.0绕X轴扭转四阶1655.6绕Z轴摆动五阶2353.4绕Y轴摆动六阶2380.8绕X轴摆动
2)频率响应分析
分别沿x、y、z轴三个方向对该模型施加大小为0.2 m/s2的加速度载荷进行频率响应分析,图6所示为提取的非球面镜的加速度响应曲线。
从频率响应曲线图可以看出,450 Hz、1010 Hz和1660 Hz为非球面镜加速度响应的主要峰值频率,在450 Hz附近的加速度响应最大,这与模态分析的结果相近,验证了模态分析结果的准确性。以450 Hz作为振动位移载荷对光机系统进行瞬态响应分析,模拟航空相机在最恶劣工况下的响应。
3)瞬态响应分析
光机集成分析中的有限元模型可以模拟外界加载在航空相机上的振动干扰。分别在x,y,z方向施加幅值为12 μm,频率为450 Hz的正弦振动位移载荷激励,得到如图7所示的非球面镜面的位移-时间响应曲线。
从仿真结果可以看出,航空相机光机系统在z方向的位移响应要比x、y方向的位移响应大一个数量级。可以得知光机系统在受外界激励时,z方向受到的影响更大,在后期结构优化中,应着重注意z方向的减振。

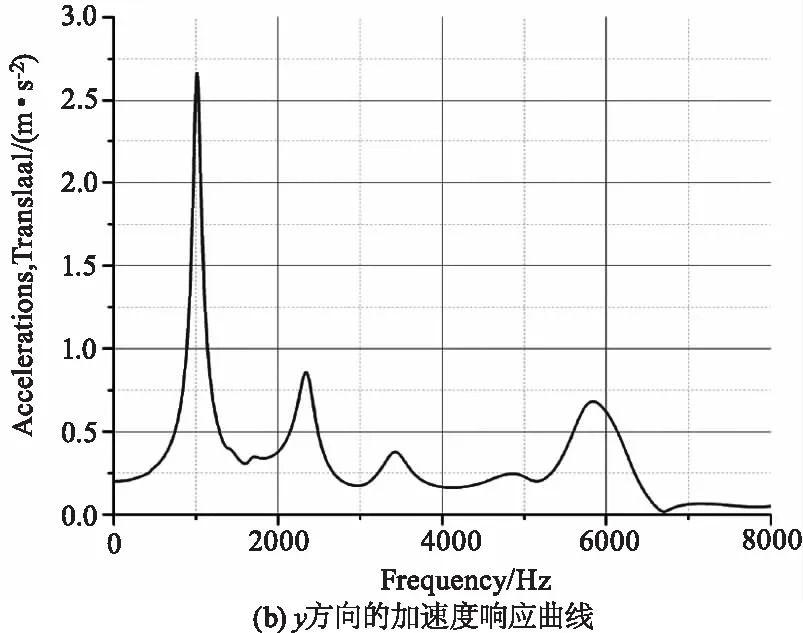

图6 非球面镜的加速度响应曲线

图7 非球面镜面位移-时间响应曲线
分别沿x,y,z三个方向航空相机光机系统有限元模型施加单位载荷,对其进行静力学分析,分别输出12个镜面的节点位移数据,通过拟合算法得到12个镜面在振动激励后的刚体位移和转动角度,表2为拟后各镜面的位移响应。
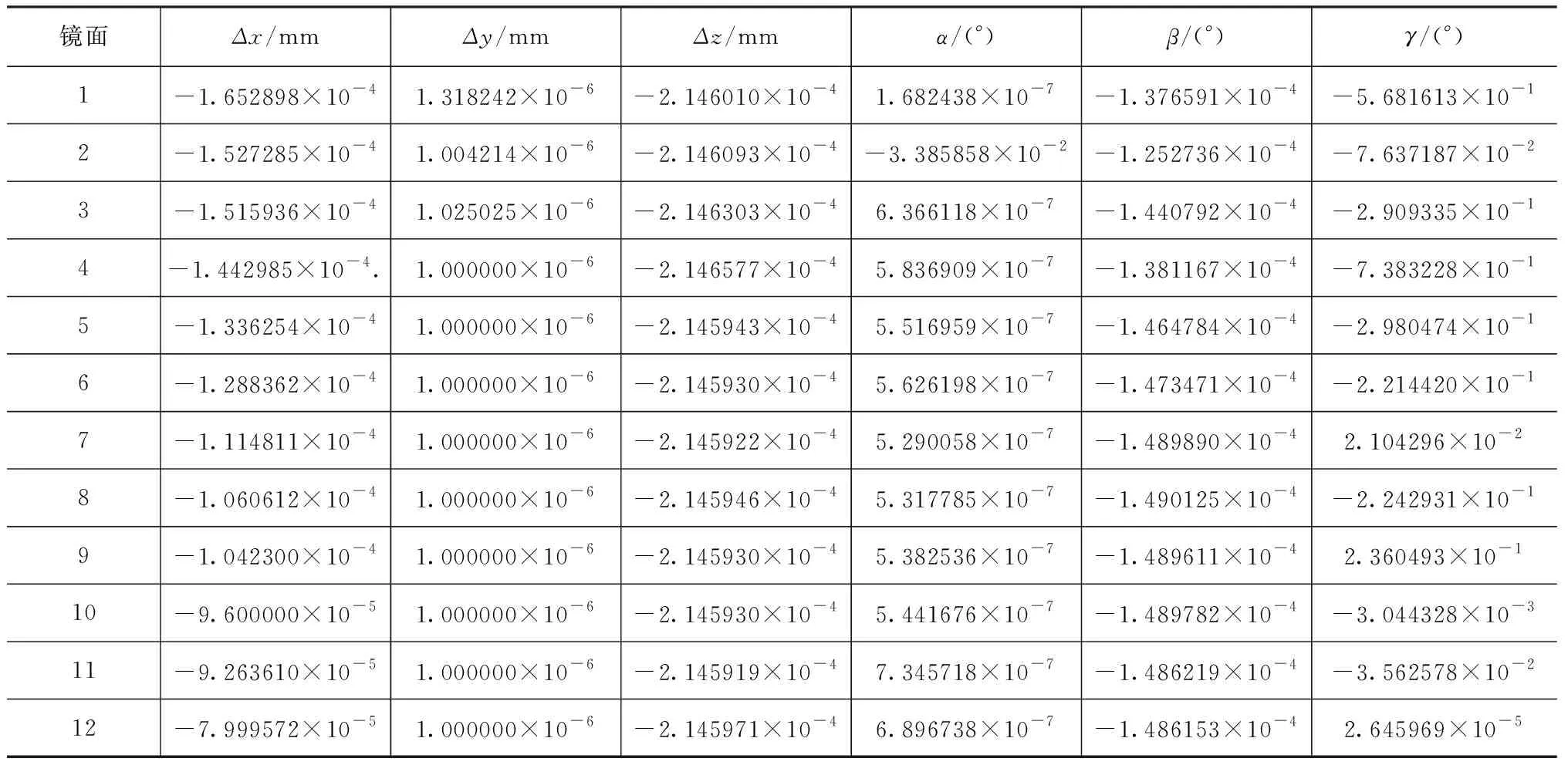
表2 拟合后各镜面的位移响应
3.2 航空相机光学系统及仿真分析
航空相机光学系统的物距为500 mm,口径是10 mm,工作波段为可见光,其光学元件材料分别采用HZBAF50、HF13、HZK6、HZK20、F2、HZBAF50,航空相机光学系统模型如图8所示。在空间采样Nyquist频率为91 lp/mm时,航空相机光学系统的调制传递函数在全视场均优于0.34。
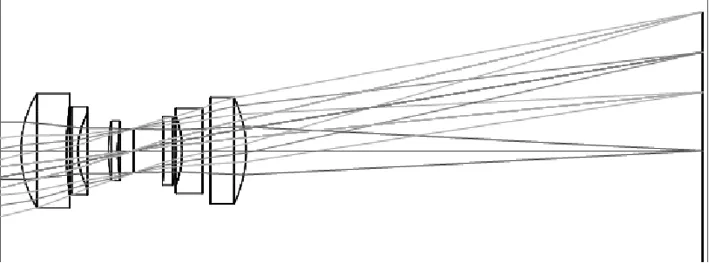
图8 航空相机光学系统模型
在光学设计软件中输入拟合得到的12个镜面的37项Fringe Zernike多项式系数,得到振动载荷激励下航空相机的光学传递函数和像点点列图,如图9和图10所示。


图9 光学系统的调制传递函数
从图9中可以看出振动激励后航空相机光学系统的调制传递函数有所降低,其中14°视场下,调制传递函数值在91 lp/mm分辨率时由0.337799下降到0.304881。图10为光学系统沿光轴方向的点列图,从图中可以看出在振动激励前的系统艾里斑半径为6.722 μm,系统每个视场下的像点点列图弥散斑半径均在艾里斑半径内。而在振动载荷激励后,在0°视场和6°视场下的系统像点点列图弥散斑半径依然落在艾里斑半径内,但在10°和14°视场下的系统点列图弥散斑半径分别为6.960 μm和14.186 μm,均大于振动激励后系统的艾里斑半径,由此可见在受到振动载荷激励后,航空相机光机系统的像点点列图在不同视场下会发生不同程度的偏移和弥散,系统成像受到较大的影响。为了得到好的成像性能,需设计减振装置。
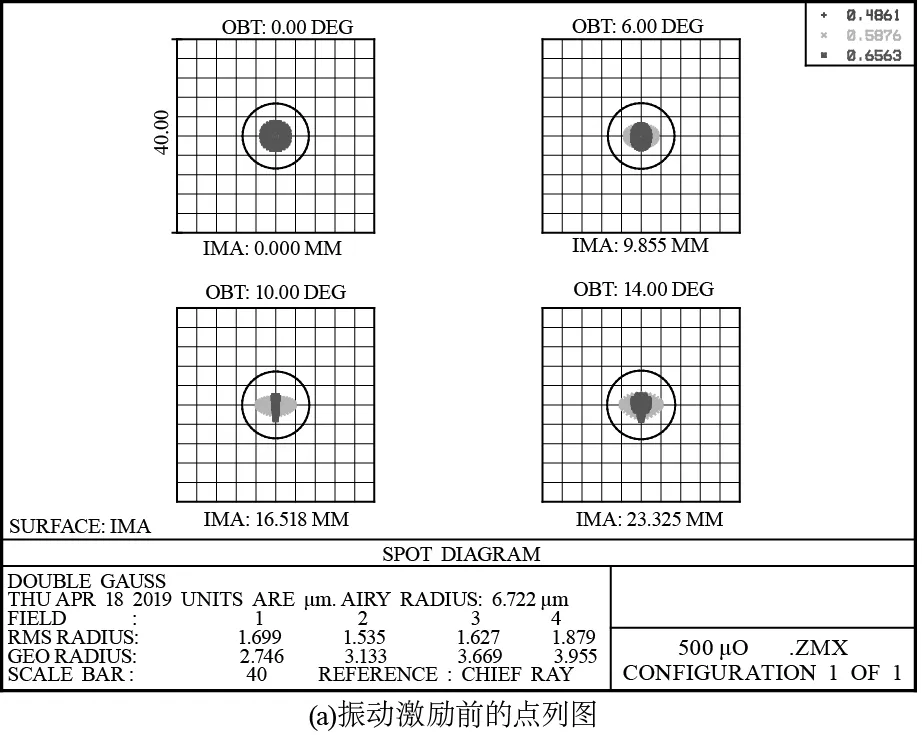
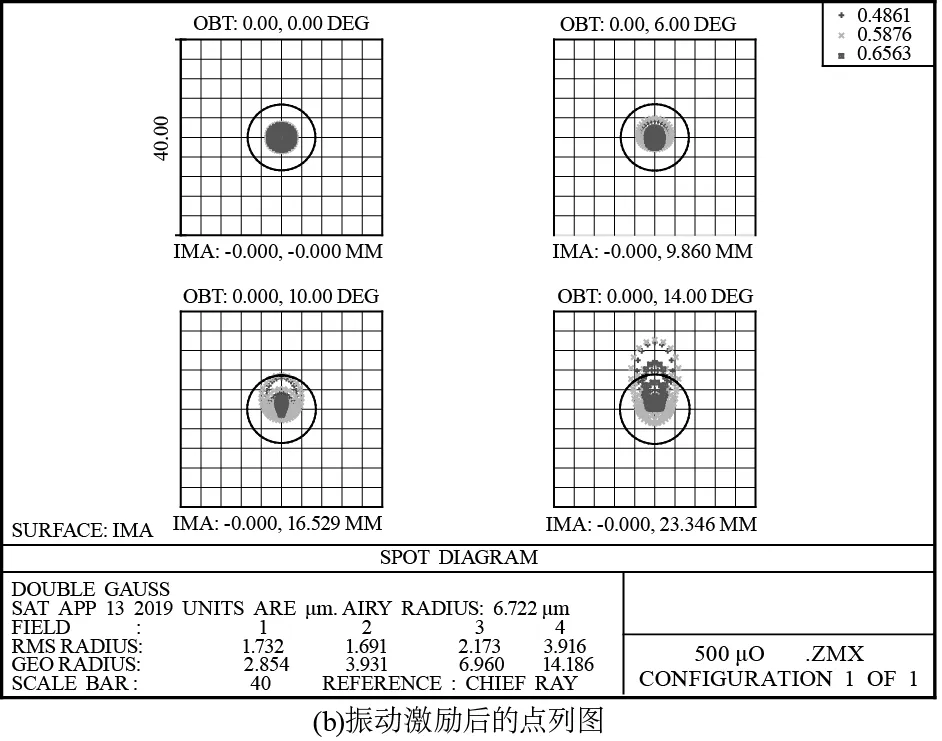
图10 光学系统的点列图
4 结 论
对于航空相机来说,光学系统在受到振动载荷激励后,其光学性能下降。采用光机集成分析的方法,分析航空TDICCD相机的成像质量受到振动激>励的变化程度。分析结果表明,项目研发的航空相机光机系统在受到振动激励后,光轴方向受到的影响最为严重,在施加单位载荷激励后,光学系统在91 lp/mm分辨率时MTF下降了9.7 %,10°和14°视场下的像点点列图发生了偏移和弥散,系统的光学性能受到影响。分析研究结果表明:光机集成分析方法对研究振动对航空相机光学系统成像质量的影响行之有效,为航空相机光机系统进一步的结构优化提供方向性指导。
猜你喜欢
成都信息工程大学学报(2022年4期)2022-11-18
航天制造技术(2022年4期)2022-09-30
初中生学习指导·中考版(2022年4期)2022-05-12
昆明医科大学学报(2022年3期)2022-04-19
花火·绘阅读(2021年2期)2021-09-10
中学生数理化(高中版.高考理化)(2021年5期)2021-07-16
中国传媒大学学报(自然科学版)(2021年1期)2021-06-09
雪豆月读·高年级(2020年7期)2020-09-10
儿童时代·快乐苗苗(2018年6期)2018-09-03
航天返回与遥感(2014年1期)2014-07-31