
老人防走失智能定位预警系统
2020-04-08 09:30郑志杰方荟沈锐栋吴鹭鉴杨恋
电脑知识与技术 2020年3期
郑志杰 方荟 沈锐栋 吴鹭鉴 杨恋

摘要:随着社会老龄化逐渐加快,老人看护问题日益突出。由于子女工作无法全天监护老人,且老人记忆力开始减退,时常出现老人外出走失的情况。为了预防老人走失,并对老人的行踪提前预警,设计了一种防走失定位预警系统。该定位系统利用ZigBee传输技术,将RSSI信号强度转化成距离数据,通过三边法自动计算老人的位置坐标,并在上位机上显示老人的位置。当超出安全范围,系统将会向管理员或监护人发出预警信息。该预警系统能够较好地实现对老人行踪的提前告警,以期在老人看护工作中发挥重要作用。
关键词:防走失;定位;预警;ZigBee;三边法
中图分类号:TP311
文献标识码:A
文章编号:1009-3044(2020)03-0274-04
1 概述
随着我国计划生育的持续展开,独生子女现象日益普遍,同时人口老龄化比例日益增长,整个社会的人口结构朝着“倒金字塔”的形式发展。当老人遇到危险时,可能由于身体状况原因,自己无法及时做出处置。因此他们的日常生活需要更多的监护。但是由于现代社会压力剧增,作为社会中坚力量的中年人并无足够时间照顾老人,走失现象时有发生,老人的安全监护问题亟待解决。为了最大限度地保障老人安全,设计了一个老人防走失预警系统。安放在老人身上的定位节点,可以将老人的实时位置信息发送给管理员或监护人。一旦老人将要离开安全范围,监控端将会收到预警提示。
主流的无线通信技术主要有ZigBee、无线局域网(Wlan)、蓝牙(Bluetooth)、蜂窝网络(Cellular Network)。其中,ZigBee因其低功耗、低成本、高速率,易组网特点,成为物联网通信技术的研究热点。近年来,许多大学和科研机构都对ZigBee定位算法做了研究。根据定位过程中是否测量节点间的距离,定位算法分为两大类:基于测距算法(range-based)和免测距算法(range-free)。无须测距的定位方法仅根据网络的连通性来定位,定位精度在一定程度上依赖于网络平均每跳距离的估计精度,如DV-Hop算法、APIT算法、质心算法等。基于测距的定位算法通过测量节点间距离或角度信息完成定位过程,如基于接收信号强度衰减的定位(RSSI)[1].基于到达时间的定位(TOA)[2]。本系统以ZigBee为无线传输方案,以RSSI作为定位基础。
2 RSSI测距原理
在无线信号传播过程中,空气阻力与障碍物都会影响到信号强度。如图所示,随着距离增大,信号强度会减小。ZigBee(ZigBee)信号工作频带為2.4千兆赫,信号强度在10米内迅速变小。这种衰减关系可用于距离的测量。如图l[3]。
基于RSSI的定位流程通常包括三个部分,如图2所示。首先采集到信号强度值传输至上位机,根据信号传输模型和RSSI值来计算距离,再利用三边算法来进行定位。
图中的信号衰减模型有三种:双径地面反射模型[4]、阴影模型[5]、自由空间模型。接收信号存在一个阈值。当接收信号强度大于阈值时,信号传送被认为是可靠的。反之被认定为传送失败并被删除。本系统采用的是最常用的阴影模型,其表达式为:
RSSI的测距原理即通过信号衰减模型获取发射节点和接收节点之间的距离信息,再通过三边测量法的计算可得出目标节点的位置信息。
3 硬件系统设计
3.1 电源电路
电源是保障单片机正常运行的重要因素。好的电源供电方案对于通信的传输质量是至关重要的。考虑到单片机采用的供电环境,设计了适配器供电和电池供电。通过设计的开关来进行切换。电压设定为SV左右,可以直接用数据线供电或者电池供电。
如图4所示,电源电路主要由电压转换芯片和防反接保护二极管构成。电源转换芯片使用的是REG117-3.3,其能够支持4.75-12V的宽电压输入。
3.2 时钟电路
在ZigBee节点电路中,CC2530 一共有4个晶体振荡器,内部晶体有16m和32k的RC晶体振动,外部晶体有32m和32.768k的石英晶体振动。
外部32m振荡器具有很高的精确性,但起始速度较慢。16m RC晶体的精确性较低,但起始速度很快。因此,ZigBee系统通电后内部16m RC振荡器会提供所需的时钟信息,32m振动器稳定下来后也会提供系统时钟,最终给系统提供脉冲信号。
晶体振荡器精确性更高,而RC的成本和功耗更低,两个不能同时工作。图5是ZigBee时钟电路。12pf负载电容连接到晶体两端,保证CC2530能够得到更精确的时钟信号。
3.3 串口电路
串口是ZigBee系统的关键接口,主要进行数据的接收与发送。并用于协调节点与上位机之间的通讯,如图6所示。
其采用PL2303芯片进行电平的转换,输出电压可以自调,并支持双向数据缓存,兼容USBl.1协议。
3.4 天线电路
天线电路是ZigBee系统必不可少的组成。其主要作用就是发射与接收电磁波信息。分为发射机与接收机两部分。如图7所示。
ZigBee的发射与接收天线是属于同样的,天线的选择是否正确与匹配电路的方案都是至关重要的。
4 ZigBee的室内定位系统软件设计
ZigBee网络有三种类型的节点:协调器、路由器和终端节点。协调器负责构造和定位无线传感网络。路由器及终端节点需要通过申请才可加入网络。协调器作为节点与计算机传输数据。路由器负责数据的转发,终端节点负责数据的收集。系统的软件设计分为以下几个步骤:
4.1 协调器初始化
协调器初始化的前提条件包括:
(1)确认节点作为协调器所需条件
必须有一个FFD(全功能节点)[7],其次该节点不能加入其他ZigBee的网络中。
(2)信道扫描
消除干扰,扫描所有信道的能量信息,对扫描的结果进行处理,删除不良信道。
(3)设置网络参数
网络层扫描到能正常使用的信道后,将给出一个网络标识符赋给新的信道,这个网络标识符可以由NLME_NET-WORK_FORMATION.request指定或者随机选择。
如图8,协调器设计初始化的具体流程为:首先对节点进行上电启动,判断其是否是FFD,如果不是FFD就跳转到失败,如果是FFD跳转到下一步.是否加入其他网络进行判断。如果是加入其他网络的话就跳转到失败,如果不是就跳转到下一步启动协议栈。接着扫描信道识别是否有合适的信道,选择合适信道并设置网络ID和协调器地址,最后网络初始化成功,等待其他节点加入。
4.2 路由器加入ZigBee网络
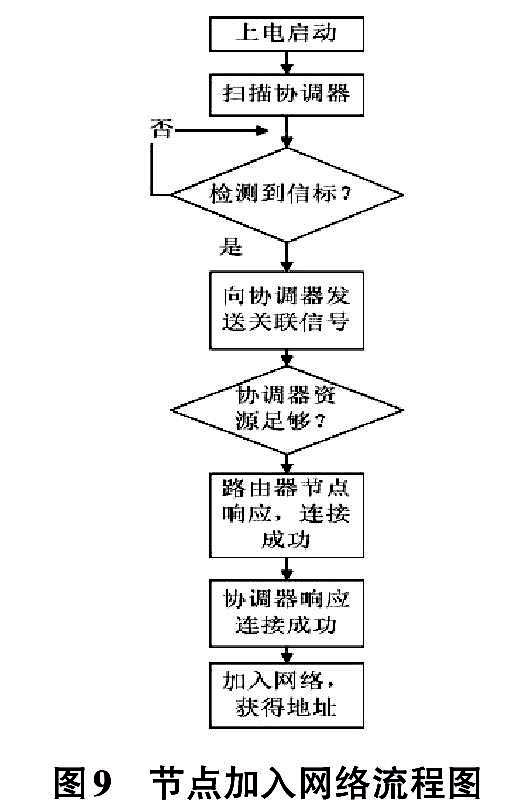
节点开始运行就主动开始扫描附近的ZigBee群,发出参与请求。路由器请求设计具体流程如图9所示。上电启动后,首先扫描协调器判断是否检测到信标,如果没有检测到信标则跳转回继续检测,如果检测到信标就向协调器发送关联信号。接着判断协调器资源是否足够,足够则路由器节点响应并连接成功。協调器响应连接成功,最后加入网络,并获取地址。4.3基于LabVIEW的上位机设计
LabVIEW除了软件,还有硬件接口,比如串口、USB口、PCI、PXI等。其拥有下面几个优点:
(1)美观的人机交互界面,用来显示数据和操作程序。
(2)通过使用数据流思想来处理并行的情况。
(3)其可以通过使用许多函数库来处理,不需要对底层的实现方面过多关注。
(4)能够使用MATLAB、C等许多不同的接口来运行,扩展更容易。
(5)拥有较多的硬件接口设备,方便数据采集以及信息处理。
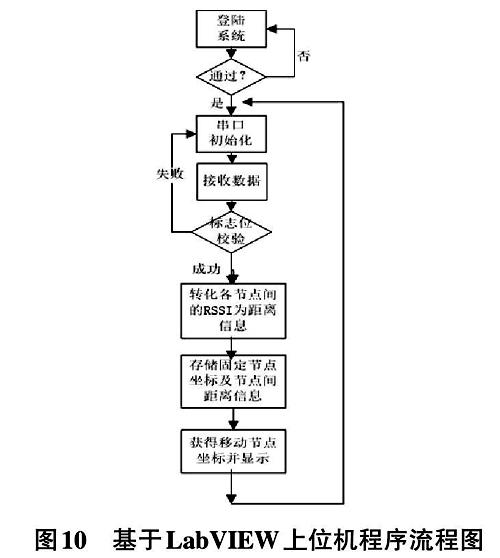
上位机设计的流程如图10所示。首先串口初始化,进行数据接收,接下来校验其标志位,如果失败跳转回串口初始化。否则,转换各节点间的RSSI为距离信息,存储固定节点坐标及节点间距离信息,最后获得移动节点坐标并显示。
5 系统的测试与实验
5.1 ZigBee组网测试
该系统构造的是网状网络,测试协调器与路由器之间能否正常通信。网络由一个协调器和三个路由器构成。测试过程:第一步先把协调器通过数据线与计算机进行对接,剩下三个路由器按序号通电。打开串口调试工具,选择协调器的端口号,将其设置为波特率115200,勾选16位显示,就能看到各节点之间的RSSI值。数据如图11第1位至第五位显示数据并且随参考点位置移动输出不同数据时,则表明该网络能正常运转。
5.2 定位模块验证实验
协调器连接计算机,将路由器1号和路由器2号与协调器O号摆成一个直角三角形,边长为3m,0号点为原点(计算机旁),1号点坐标为(3,0(门边椅子上),2号点为(0,3)。如图12与图13所示。
将路由器节点3号由移动目标带人构成的直角三角形范围内,能看见一个黄点在闪烁,即定位的节点坐标位置。如图12与图13所示。
在参考点与移动信标节点之间安排一个人作为障碍物,保持其他条件不变,观察黄点位置情况,如图14与图15所示。
由图15和图16可以看出有障碍物的时,定位位置会存在偏差。在保持位置与障碍物数量不变的情况下改变移动节点直置进行测试,分别取点(0.5.0.5)、(1,1)、(2,2)、(1,3)、(3,1)来进行测量误差数值d,并且算出其平均误差值为0.434m。
6 结束语
该系统是基于ZigBee无线传感器网络的一套定位系统,利用信号强度RSSI的三边定位算法实现了走失老人的位置的实时定位,并给出预警。这一系统能够低了老人走失的风险,具有深刻的社会意义,而且实施该方案的成本与复杂度较低,因此其具有一定的市场发展前景。
参考文献:
[1]薛雯,基于RSSI的无线室内定位系统设计与实现[D].南京:南京邮电大学,2016.
[2]卢倩倩,李有明,常生明,等.基于到达时间的无线传感器网络协作定位算法[J].电信科学,2019,35(1):62-66.
[3]韩晓晨,基于ZigBee技术的定位系统研究与设计[D].牡丹江:牡丹江师范学院,2016.
[4]余雨.小蜂窝场景中室内短距离无线信道传播特性研究[D].南京:南京邮电大学,2017.
[5]臧国东,基于WiFi的无线指纹定位技术研究与实现[D].南京:南京邮电大学,2018.
[6]刘琛,倪雪莉.基于三边测量法的移动锚节点定位方案[J].信息技术,2019,43(3):29-32,36.
[7]周益。基于Zigbee技术的无线传感网络拓扑设计与实现[D].苏州大学,2009.
猜你喜欢
导航定位与授时(2020年5期)2020-09-23
铁道通信信号(2020年9期)2020-02-06
今日农业(2019年12期)2019-08-13
知识经济·中国直销(2018年3期)2018-04-12
现代园艺(2017年22期)2018-01-19
火控雷达技术(2016年3期)2016-02-06
学习月刊(2015年1期)2015-07-11
