
基于场景识别的电动汽车唤醒、休眠策略设计
2020-04-10 06:52徐志峰孙江辉张兆龙李玉军
汽车实用技术 2020年5期
徐志峰 孙江辉 张兆龙 李玉军


摘 要:为合理应用车载低压电能,文章设计了基于应用场景识别的一体化分层唤醒、休眠控制的策略。根据KL30下整车有效唤醒状态按需唤醒电控单元,并引入用车场景预测、提前唤醒电控单元,解决电控单元按需唤醒下用车场景快速切换带来的响应延迟问题;同时,通过场景识别进一步排查无法休眠的电控单元,进行防低压亏电控制。文章应用CANOE?工具仿真了用户遥控解充电枪锁操作及充电口单元无法休眠工况,结果表明,所提出的控制策略能够提高解充电枪锁响应速度,并能够识别出无法休眠电控单元进行防亏电控制。
关键词:场景识别;电动汽车;唤醒、休眠策略
中图分类号:TP273 文献标识码:B 文章编号:1671-7988(2020)05-31-04
Abstract: In order to save 12V power, wakeup & sleep mechanism is designed by use case recognition. After use case recognition and user intention prediction according to the running wakeup resource and user action, only related ECUs will be waked up. Moreover, ECUs that cannot sleep in time will be marked and measures will be taken to prevent 12V battery drainage. Door operating condition and illegal wakeup condition of a model car was simulated by CANOE, to validate the control strategy in energy saving and battery drainage prevention, accordingly.
Keywords: Use Case Recognition; Electric Vehicle; Wakeup &Sleep Control
1 前言
随着汽车智能化、网联化、电动化、共享化,车载电控单元数量不断增多[1]。电控单元应按照用户需求及时唤醒,以执行电控功能;同时,应在无功能需求时尽快进入掉电或休眠状态,以防止蓄电池亏电[2]。当前,文献多围绕通过设计局部网络[3-5],开展唤醒、休眠机制设计的研究,但未考虑设计机制以避免当前无关、未唤醒控制器在下一功能需求出现时唤醒启动慢、影响用户体验的问题。此外,现有防亏电研究多聚焦于低压电源管理策略[6],而围绕如何识别无法休眠电控单元、进行防亏电主动控制的研究也较少。
针对以上问题,本文设计了一种基于所识别的应用场景同时考虑用户意图预测的唤醒、休眠的一体化控制机制,能够在保证功能响应前提下按需进行部件差异化唤醒;同时,识别无法休眠部件并进行防亏电主动控制。
2 一体化供电、唤醒及休眠控制系统架构
2.1 供电、唤醒源的分类及设计方法
按照供电电路的结构,汽车上典型的低压供电方式可分为两类:一类为常电供电,即直接由12V蓄电池正极供电;还有一类为由其它控制器控制继电器供电,比如ACC继电器、IG继电器、充电类控制供电继电器,等。按照唤醒来源,可将唤醒源分为两类:一类为本功能域外输入的唤醒,比如动力域接收的网联模块发出的远程控制功能唤醒信号;另一类为自身直接接收的传感器输入的唤醒信号或本功能域内其它控制器输出的唤醒,比如动力域控制器接收到的插枪唤醒信号。本文提出一种场景需求设计法,進行电控单元供电、唤醒机制设计。首先根据用户使用情况进行车辆场景划分,每个场景下均对应一系列电控功能,电控功能又与控制器关联,经过如此由上至下分析,明确了电控单元需要在哪些用户场景下工作,最终对应得出供电、唤醒机制可选范围。
根据用户使用场景,将用车场景划分为静置休眠、总线激活、高压上电、低压上电、整车上电、车辆驾驶共六个场景,各模式下典型功能如表1所示。在休眠静置场景下,所有电控单元应该处于断电或休眠状态。部分接收车外唤醒的控制器保持唤醒探测状态,需要连接常电。在总线激活场景下,通常情况下为某接收到车外唤醒的控制器将功能相关控制器唤醒,以实现功能运转,这就要求此类接收车外事件唤醒的控制器具备唤醒输出能力,比如对外发送网络报文[7],或者对外输出高低电平变化的线路唤醒;与此对应,与功能相关的控制器应能够被上述第一个唤醒控制器唤醒。在高压上电场景下工作的电控单元,可由动力域控制器在进行高压上电引导时同步唤醒,比如热管理系统控制单元。仅在低压上电、整车上电、车辆驾驶场景下有工作需求的控制器,仅需要具备接收IG唤醒,出于节省IG电连接线束考虑也可具备网络唤醒。
当电控单元无功能需求时,应在供电或唤醒切断后对应进入停机或休眠状态。
2.2 一体化供电、唤醒及休眠架构设计
为便于整车唤醒、休眠的统一管理,本文设计了具有分层架构的一体化供电、唤醒机制。与分散式唤醒、休眠机制不同,本架构下,各功能域控制器的唤醒、休眠由域控制器全盘管理,包括根据场景唤醒需要的控制器或引导其休眠,和无法正常休眠控制器的识别与防低压亏电管理。域控制器即指图1的动力域、车身域、信息娱乐域等的主控制器[8]。
以交流充电功能为例,介绍本文所研究的分层唤醒机制。在用户将交流充电枪与车端充电口连接后,充电口控制单元会被充电枪连接这一事件唤醒;接下来,充电口控制单元将整车控制器唤醒,并告知其现在有交流充电枪连接;整车控制器在判定车辆具备充电条件时,将动力电池控制器、冷却控制器等唤醒,以执行充电。
前文中提到,各域控制器根据当前场景判断及场景预测,进行下游控制器唤醒,当本功能域和其它功能域均无相关功能需求时,域控制器引导下游控制器进入休眠。其中,本功能域无功能需求是指域控制器自身无报文唤醒以外唤醒输入,域内各下游OSEK网络管理控制器均置位并发送休眠请求标志位,或不参与OSEK网络管理的域内控制器停止报文发送。
3 预测唤醒与异常防亏电控制
考虑到电控单元由休眠状态到唤醒后的可正常工作状态,大概需要150ms左右的时长,若唤醒回路中有不止一个控制器,则整体唤醒时间将翻倍或更长,最终可能影响用户需求的响应速度。因此,有必要进行场景预测并提前唤醒即将可能用到的控制器,以准备好响应用户需求。本文主要研究用户解锁交流充电枪操作下的预测唤醒控制。为防止较大电流充电过程中,充电枪被带载拔出造成设备损毁,规定充电功率在6.6kw时需要配置充电枪锁止装置。此外,在充电结束后,出于防盗考虑,车端充电口控制单元保持充电枪锁处于闭锁状态,当用户下一次用车时,按动遥控钥匙解锁车门后,再连续按动遥控钥匙解锁键两次即打开充电枪锁,以便于用户在车外即拔下充电枪,结束充电。在这一场景下的预测唤醒控制策略,可表示为流程图2。
域控制器能够根据场景建立唤醒白名单,此白名单用于休眠异常控制器的识别。域控制器根据接收到的报文情况,对于活跃报文属于白名单外电控单元的,标记为无法正常休眠,此后域控制器清除对域外网段的功能需求,以使本域内的休眠故障控制器不影响其它网段正常休眠。
4 工况仿真与策略验证
4.1 仿真环境介绍
本文应用CANOE进行了总线仿真,所搭建的网络分为三个网段,分别为车身域网段、动力域网段、动力域内部网段。所搭建网络模型中的4个控制器均具备OSEK网络管理机制,且均连接常电。GW为网关控制器,负责根據域控制器跨网段路由需求进行信号跨网段路由;PDCU、BDCU分别为动力域控制器、车身域控制器,负责根据本域内及整车其它功能域的功能需求,进行下游控制器唤醒、休眠引导控制;CCU为充电口控制单元,负责根据PDCU命令进行电磁锁闭锁、解锁,负责接收充电设备信号并首先被唤醒。
4.2 充电后用户远程解锁场景仿真
4.2.1 未采用预测唤醒控制策略时解充电枪锁
仿真结果图3所示,首先,遥控钥匙解锁信号将BDCU唤醒,BDCU开始在车身域网段发送报文,GW随后被唤醒并在车身域网段发送报文。可见,由于未采用预测唤醒策略,用户第一次按下解锁车门按键,BDCU仅根据当前功能需求未将动力域唤醒。随后3.2s时BDCU接收到用户连续两次按下遥控钥匙解锁键后,才开始要求GW唤醒动力域,并向PDCU发送解锁信号,后者再将CCU唤醒,在3.7s时解锁充电枪的电磁锁。从用户在开始发出解充电枪锁信息,到CCU将充电枪锁解开,中间需要依次唤醒PDCU及CCU,大概耗时500ms。
根据用户调查,发现部分用户在连续两次按下遥控钥匙解锁键后,会同步进行拔枪操作,若有上述500ms响应延时,会导致第一次拔枪失败。
4.2.2 采用预测唤醒控制策略时解充电枪锁
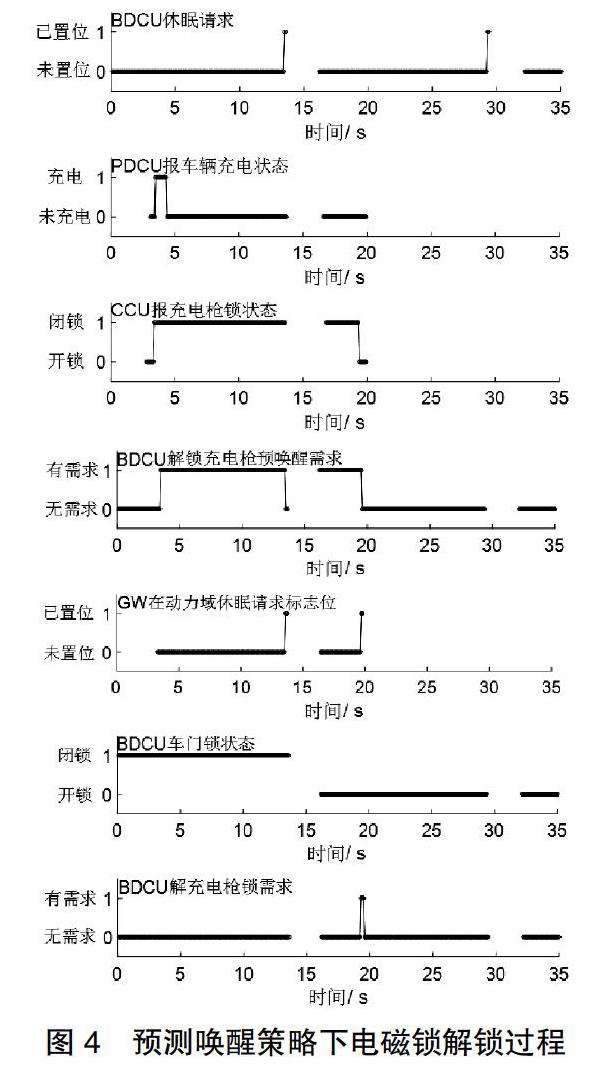
当采用预测唤醒控制策略时,仿真结果如图4所示。根据结果发现,在车辆进入充电前,3.3s时电磁锁已经闭锁,CCU经过PDCU、GW的信号传递,向BDCU发送了电磁锁闭锁状态,后者开始置位预测唤醒需求位。充电结束后,整车进入休眠状态,用户第一次按下遥控解锁按键,16.2s时BDCU醒来即开始向GW提出唤醒动力域的需求,并通知PDCU有预测充电枪解锁需求,后者将CCU唤醒。至此,BDCU、PDCU、CCU均进入唤醒状态,准备好执行用户的解充电枪锁命令。19.3s时BDCU收到上述命令传递到CCU后,充电枪锁随后打开,间隔100ms。用户拔下充电枪,由于无功能需求,车辆进入休眠。32.2s时,当用户再次按下遥控钥匙解锁车门按键,车上仅BDCU被唤醒,PDCU、CCU均未唤醒。
结果表明,在采用了预测唤醒策略后,BDCU能够根据充电枪电磁锁闭锁状态,置位充电枪解锁预测唤醒需求位,并在下一次被遥控解车门锁信号唤醒时,要求将PDCU、CCU唤醒,便于收到进一步命令后将充电枪迅速解开。
4.3 整车下电后CMU无法休眠场景及防亏电控制
本节进行异常休眠故障仿真。在充电枪未连接的前提下,CCU持续发送休眠请求指示位为0,导致动力域内网段无法休眠,且PDCU无法向GW发送休眠请求;1.1s时,PDCU根据收到的报文发现,车辆未插枪条件下,CCU仍无法休眠,从而识别出CCU有异常休眠情况,PDCU标记“休眠异常标志位”;此后,PDCU在动力域对外网段发送休眠请求指示位,在BDCU满足延时10s休眠条件后,GW引导整车除动力域内部网段外,进入休眠状态,最终使休眠异常仅影响动力域对内网段。
5 结论
本文研究了基于应用场景识别的电动汽车唤醒、休眠一体化控制策略,结论如下:
(1)分层的一体化唤醒、休眠控制架构,统一解析车辆的功能需求,基于应用场景需求进行相关电控单元唤醒控制,从而最小化唤醒电控单元数量,并进行异常休眠处理;
(2)基于应用场景预测,域控制器可以进行下游控制器的预测唤醒控制,本文探讨了遥控解锁场景下,采用预测唤醒策略能够保证充电枪解锁更迅速;
(3)基于应用场景,识别出无法正常休眠的电控单元,进行防亏电控制,以降低部件休眠异常带来的12V蓄电池亏电的风险。
参考文献
[1] 欧阳明高.迎接新能源智能化电动汽车新时代[J].科技导报, 37(7): 1-1.
[2] Suozzo C. Lead-acid battery aging and state of health diagnosis[D]. The Ohio State University, 2008.
[3] Seyler J R,Streichert T, Warkentin J, et al. A self-propagating wakeup mechanism for point-to-point networks with partial network support [C]//2014 Design,Automation & Test in Europe Conference & Exhi -bition (DATE). IEEE, 2014: 1-6.
[4] 顾晓莉.车载低压电源管理系统的研究[J].汽车实用技术,2011(07): 5-9.
[5] Liebetrau T, Kelling U, Otter T, et al. Energy saving in automotive E/E architectures[J]. Infineon Technologies, www. infineon. com, Tech. Rep, 2012.
[6] Eberhard Meissner,Gerolf Richter. Battery Monitoring and Electrical Energy Management[J]. Journal of Power Sources,2003,116(1).
[7] 初洪超.网络管理在汽车CAN系统的应用[J].汽车实用技术,2016 (05):114-118.
[8] Reger L.The EE architecture for autonomous driving a domain-based approach[J]. ATZelektronik worldwide, 2017, 12(6): 16-21.
猜你喜欢
内燃机与配件(2022年2期)2022-01-17
环球时报(2016-12-16)2016-12-16
考试周刊(2016年90期)2016-12-01
民生周刊(2016年9期)2016-05-21
投资北京(2016年6期)2016-05-14
中国新闻周刊(2015年45期)2015-12-14
世界汽车(2015年3期)2015-09-10
计算机应用文摘·触控(2014年4期)2014-02-22
