
车道偏离预警算法研究
2020-04-10 06:52初建圳
汽车实用技术 2020年5期
初建圳

摘 要:为提高车辆行驶的主动安全性,文章根据车辆偏离速度将TLC算法和FOD算法相结合,针对车道偏离预警系统提出了多模式车道偏离预警算法,并搭建Simulink模型,结合Carsim进行联合仿真实验。仿真结果表明,提出的算法能更好的进行车道偏离预警。
关键词:主动安全;车道偏离;偏离速度;预警算法
中图分类号:U462.3 文献标识码:B 文章编号:1671-7988(2020)05-35-03
Abstract: In order to improve the active safety of the vehicle, this paper combines the TLC algorithm with the FOD algorithm according to the vehicle deviation speed, proposes a multi-mode lane departure warning algorithm for the lane departure warning system, and builds the Simulink model, combined with Carsim for joint simulation experiments. The simulation results show that the proposed algorithm can better perform lane departure warning.
Keywords: Active safety; Lane departure; Deviation speed; Warning algorithm
前言
据相关部门统计发现,由于驾驶员注意力不集中或疲劳驾驶等人为因素造成的交通事故占绝大多数,其中约有50%的事故和车辆偏离车道线有关。
车道偏离辅助系统(Lane departure assistance system,LDAS)通过摄像头或雷达对车道线进行检测,结合车辆自身定位信息和状态信息确定车辆是否偏离,进而发出预警信息提醒驾驶员进行操作。当前针对该系统主要集中在预警决策算法的研究上,主要包括TLC算法、FOD算法、CCP算法等。其中TLC算法的优点是预警时间长,能给驾驶员预留较长的反应时间,但其预警触发机制对行驶状态考虑较少。FOD算法则考虑到不同驾驶员的驾驶习惯,在设置虚拟车道线时考虑驾驶员习惯偏移量,但同样假设在偏离过程中车速和行驶方向不变。
针对上述方法优缺点,考虑到不同驾驶员的驾驶习惯各不相同,本文提出一种多模式预警算法,并通过Carsim/ simulink联合仿真验证该算法的可行性。
1 常见预警算法
1.1 TLC算法
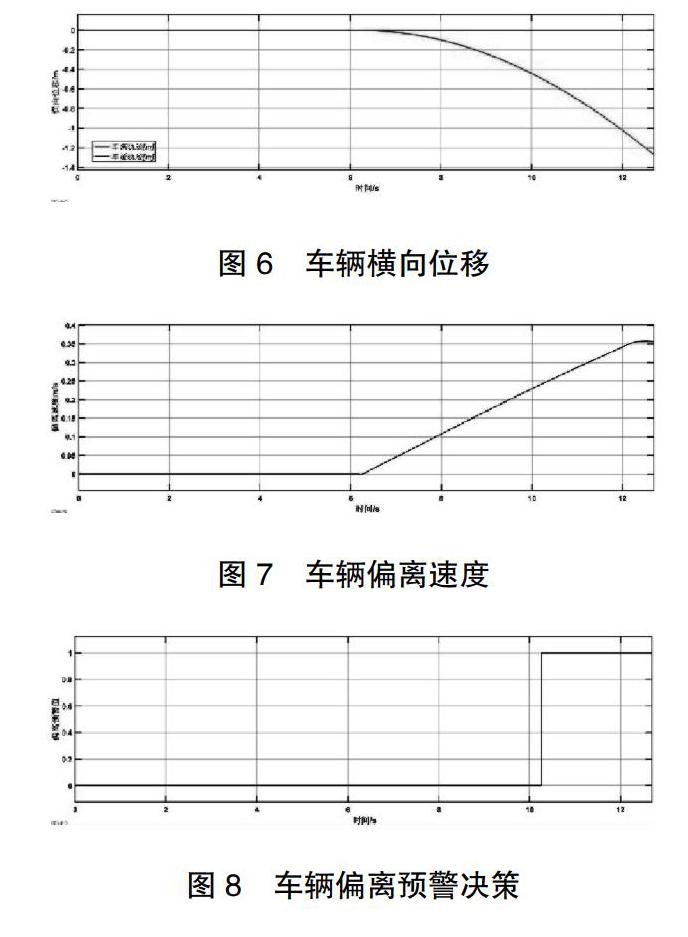
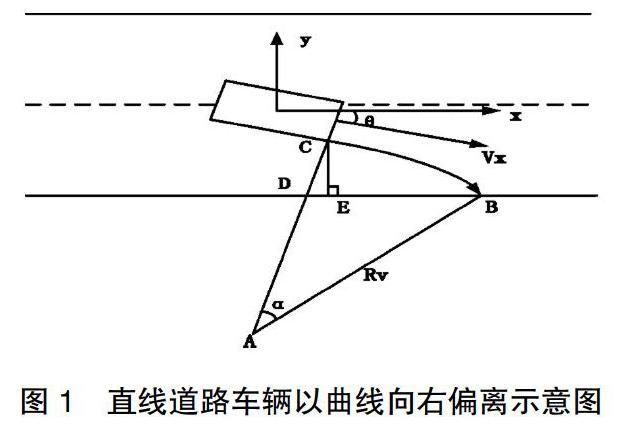
TLC算法以车辆从当前行驶状态到前轮触及车道线时间为计算依据。其工作原理:通过计算得到TLC值,同时设定阈值时间t,当TLC 纵向TLC的计算公式如下: (1)式中,DLC表示车辆左右前轮触及车道边界线时所行驶的纵向距离,Vx表示车辆的纵向速度。 当,即车辆跨越车道边界线的时间小于车道偏离预警的阈值,车道偏离预警系统启动。式中Ttw为预警系统启动的最低阈值。 车辆在直线道路上的偏离过程中假设航向角不变,则车辆运动估计类似于圆曲线,如图1所示: 在上图中,C点表示车辆右前轮,B点表示车辆以当前状态偏离车道时运动轨迹与车道边界线的交点。 式中,Rv是车辆运动轨迹的曲率半径,α是車辆从当前位置到运动轨迹与边界线相交时经历的圆心角,ω是车辆的横摆角速度。 利用三角函数关系得: 1.2 FOD算法 FOD算法是一种预估未来偏移距离的算法,其可以充分考虑不同驾驶员的驾驶习惯,通过在道路上设定虚拟道路边界满足不同驾驶员的需求。跟TLC原理类似,假设一定时间段内车辆的速度和横摆角速度保持不变,当车辆在预估时间后偏移距离超过虚拟车道边界时触发预警策略。 FOD算法的主要参数包括预估时间T和预计偏离位移L。如图2所示,当车辆在预测时间T后其横向位移超过虚拟车道线坐标Lx,即Lp'>Lx,代表车辆有可能触及虚拟车道线,从而实现车道偏离预警。具体如式所示: 2 多模式预警算法 针对上述两种算法的优缺点,考虑到通常车辆偏离车道的情况主要有两种工况:车辆高速偏离行驶车道和由于车辆靠近车道线驾驶员误操作偏离车道。前者需要给驾驶员留出较多反应时间,因此适合TLC算法。后者需要算法适应驾驶员的驾驶习惯,需要保证误警率低,所以更适合FOD算法。 同时为了防止误报警引起驾驶员反感,考虑国标中最早报警线位置。其数学表达式为: 综上所述,单一的预警算法无法同时满足上述两种工况,因此提出多模式预警算法,根据车辆的位置信息和状态信息,自动选择合适的偏离预警算法。引入偏离速度作为两种模式切换的依据。 (1)当Vdep大于0.5m/s时,且D<0.75m,表明此时汽车以较快车速偏离车道且到达最早预警边界线,此时车道偏离预警系统采用TLC算法判断汽车偏离状态并发出预警。 (2)当Vdep小于0.5m/s时且D<0.5Vdepa,表明此时汽车偏离速度较小且到达最小预警边界线。此时车道偏离预警系统采用FOD算法判断汽车偏离状态并发出预警。 3 虚拟仿真实验 本文基于Carsim和Matlab/Simulink构建LDW控制策略-车辆动力学-道路交通的闭环系统,对多模式预警算法进行仿真验证。由于真实环境中大多数车道偏离事故为高速公路直线道路车辆以曲线轨迹偏离,且向左向右偏离原理相似,本文以直线道路车辆以曲线轨迹向右偏离为例验证算的可行性。 试验一:车辆以固定车速70km/h在直线道路行驶,驾驶员在6秒时误操作保持方向盘向右打,偏航角较大(保证预警时偏离速度大于0.5m/s),测试车道偏离预警情况(车道偏离预警系统启动时决策状态记为1),如图所示。 4 结论 本文基于Carsim/Simulink模型搭建仿真场景,设定两种工况对提出的预警算法进行验证。 (1)通过联合仿真实验证明所提出的多模式预警算法在设定的两种工况下均可有效地判断车辆是否发生偏离以及是否具有偏离出当前车道的趋势,从而进行预警。 (2)本文中只验证了直线道路下车辆向右偏离时预警算法的有效性,后续应该分析该预警方法对不同车速以及不同道路曲率的鲁棒性。 参考文献 [1] 于立娇.基于EPS的车道保持辅助控制算法设计与实验验证[D]. 吉林大学, 2016. [2] 王易川.基于视频的ADAS车道检测系统的研究[D]. [3] 黄杨成.基于电动助力转向系统的车道偏离辅助系统的研究[D].
