
交通拥堵辅助(TJA)系统方案及测试方法
2020-04-10 06:52刘建平骆文婕郑望晓郑阳
汽车实用技术 2020年5期
关键词:测试方法
刘建平 骆文婕 郑望晓 郑阳


摘 要:通过对交通拥堵辅助(TJA)系统的功能介绍,分析TJA系统工作原理以及对系统技术方案进行阐述。根据系统功能定义,提出一种对TJA系统性能的试验方法,对TJA的开发和验证有一定的借鉴意义。
关键词:交通拥堵辅助系统;系统方案;测试方法
中图分类号:U491.2 文献标识码:A 文章编号:1671-7988(2020)05-87-03
Abstract: Through the introduction of the functions of the Traffic Jam Assistance (TJA) system, Analysis of the working principle for the TJA system, and explain the system technical solutions. According to the system function definition, a test method for the performance of TJA system is proposed, which has certain reference significance for the development and verification of TJA.
引言
随着科技的不断进步,汽车已逐步进入智能化时代,驾驶员辅助系统越来越受到消费者的关注。有调查结果显示,大部分中国车主对驾驶员辅助系统持积极开放的态度,并且表现出极高的兴趣度和认知度。有超过80%的受访者认可驾驶员辅助系统能够大幅提高驾驶安全性和舒适性,73%的受访者则表示愿意依赖驾驶员辅助系统,来替代日常驾驶中的部分简单操作[1]。
安全輔助驾驶系统在解决交通安全问题上的作用有目共睹,如果其在保证安全性的同时,能够缓解交通拥堵,减少能源消耗量和污染物排放量,那么该系统应用将会同时缓解大部分的交通问题,对交通行业的发展有十分重要的意义[2]。近两年来,越来越多的车型在自适应巡航控制系统(ACC)的基础上搭载了交通拥堵辅助系统(TJA),并受到消费者的青睐。与全速ACC系统提供车辆纵向控制相比,TJA同时还车道内的车辆横向控制,通过产生转向力来实现,以便将车辆保持在预定的路径上[3],在一定程度上减轻驾驶员的负担。
1 TJA系统方案
交通拥堵辅助作为部分自动驾驶功能之一,通过前向摄像头和毫米波雷达传感器的数据融合,可准确判断包括本车道和相邻车道在内的车辆周围交通情况(如图1)。该功能适用于在低速(0~60kph)交通拥堵状况下,于高速公路和较好的城市快速路高架路(无十字路口、行人、电瓶车等的简单路况)实现对车辆纵向和横向的同时控制。还可根据预设的车速和距离,保持在本车道内自动跟随前车行驶。
当车辆行驶时前方毫米波雷达时刻监测车辆前方区域车辆目标,前方摄像头时刻监测车辆前方车道、车道线信息、车流信息[4]。通过前方雷达和前方摄像头数据融合,前方摄像头将拾取到的车辆信息、车道信息、车道线信息等通过私有CAN传输给雷达,雷达识别到的有效目标进行跟随控制、弯道控制;根据驾驶员设置的车间时距、前车速度通过控制EMS、ESP实现自车加速、减速保持自车与前车合适的车间时距,通过摄像头识别车道线或者雷达和摄像头数据融合识别到的“车流”(当识别不到车道线时以周围车辆的行驶轨迹模拟出来的车道)通过EPS对方向盘施加横向扭矩实现车辆保持在车道内,从而实现交通拥堵时,车速低于60km/h条件下,自车既保持在车道内还可以跟随前车行进,适合于交通拥堵时工况单一简单可以解放驾驶员双手和双脚,增加了驾驶的便利性。
TJA系统工作状态分为开启、使能、激活、关闭、故障等五个状态,根据整车关联系统的状态,以及环境信息(如挡位、车速、制动踏板、车道线、前方车辆等)确定TJA系统工作状态,TJA系统状态机如图2所示。
TJA系统使用典型场景:
①道路标线可见、引导车辆可见,TJA将车辆维持在车道中心行驶,不跟踪前方的引导车辆偏移。
②道路标线可见,引导车辆不可见。TJA将车辆维持在车道中心行驶。
③道路标线不可见,引导车辆可见,TJA跟随引导车辆的侧向方位行驶。此情况通常会在交通拥堵情况下出现,此时道路标记被前方车辆覆盖。
④道路标线不可见,引导车辆不可见。TJA由于缺少道路标线和引导车辆的信息而解除。
⑤引导车辆切出TJA不会跟随引导车辆进行侧向移动,如果未检测到新的引导车辆,TJA会自动解除,如果检测到新的引导车辆,TJA会跟随新的引导车辆进行侧向移动。
⑥车辆切入在切入车辆未被检测为引导车辆之前,TJA不会跟随此车辆进行侧向行驶。
⑦弯道行驶,TJA将车辆控制在自身车道内行驶。
⑧车道返回,如果TJA的作用开始于车辆远离车道中心的某一点,TJA可以平缓的将车辆转回车道中心,即使在脱手驾驶的情况下。
⑨变道,如果驾驶员想要变道,例如开启转向灯或快速转向,TJA可以逐渐减小对车辆的控制,以保证驾驶员能够舒适变道。
⑩单侧车道线短暂丢失,如果单侧车道线短暂丢失,TJA不会关闭,此时TJA的控制会基于一侧车道线而进行。
并道,在并道情况下,TJA平缓地降低控制扭矩或转角,避免扭矩突然退出,造成驾驶员的不适感,扭矩或转角下降的时长约为3s。
2 TJA试验分析
通过对TJA系统应用的典型场景分析,同时结合用户在实际使用过程中的关注点。TJA系统纵向控制方面与ACC一致,目前行业内对于ACC系统的试验已有比较完善的标准,比如ISO 15622和ISO 22179,以及GB/T 20608。因此本文中主要考虑TJA横向控制方面的试验,试验中同步考察系统纵向的表现。
2.1 试验工况定义
试验工况主要分为两种类型,直道试验和弯道试验。其中直道试验包括目标识别试验、直道跟停试验、直道切出试验和直道切入试验。弯道试验主要为弯道加减速试验工况。
试验中目标车辆安装驾驶机器人,实现对目标车辆加减速、车速、以及行驶轨迹的精确控制,同时试验中同步采集测试车辆状态信息,用于试验数据的分析。
2.1.1 目标识别试验
该试验工况,主要测试相邻车道低速同向行驶车辆是对TJA系统的横向控制和纵向控制是否存在影响,考核TJA系统传感器对目标的识别能力。试验过程为TJA系统设置一定车速,跟随前车沿车道中心线匀速行驶,并超越相邻车道低速行驶的车辆。记录该过程中测试车辆状态数据,评价该过程中车辆纵向速度控制的稳定性,横向控制有无震荡或过多过快的调整。
2.1.2 直道跟停试验
直道跟停是TJA系统应用场景中基础工况,该工况主要考核TJA跟随目标车行驶,对于目标车加减速时的响应是否及时,在纵向进行速度控制的同时,横向控制是否稳定。试验的具体工况为,TJA设置一定车速跟随前车稳定行驶,一定时间后,前车以一定减速度减速至停止,在TJA转变为待机状态前,前车再以一定加速度加速至试验开始时的速度值。
2.1.3 直道切入/切出试验
在交通拥堵交通流中,相邻车道车辆的切入/切出为典型场景(如图3)。该场景下,TJA系统要求能及时识别到切入的车辆,或在前车切出后,需要能及时识别到本车道前方车辆。在前车切入切出的过程中,TJA的横向控制不应跟随前车偏离车道,需要仍然保持在车道中间行驶;在纵向速度控制上应平稳,不得出现突兀的加减速情况。
2.1.4 弯道加减速试验
在弯道工况中,TJA的横向控制一直存在一定的难度,弯道中TJA对纵向和横向速度的控制能力也一定程度上表征了该系统性能的上限。该工况中测试速度与直道类似,在直道上跟随前车在车道内保持一定车速稳定行驶,在进入弯道后,前车以一定减速度刹停,在测试车TJA系统转变为待机状态前,前车再已一定加速度加速至试验开始时的速度后匀速行驶,在该过程中前车尽量保持在弯道中心线行驶。考虑弯道的特殊性,要求在弯道中测试车辆不应出现压线行驶,纵行速度应控制平稳,方向盘无过多或多大幅度的调整。
2.2 试验验证
以某搭载TJA系统的某车型为例,对于跟随前车加减速行驶的工况,测试该工况下TJA系统性能。测试中客观数据主要关注测试车辆横向控制能力、跟随过程中对前车加减速变化时的响应能力、纵向速度的控制能力等。根据测试的客观数据结合驾驶员的主观感受,从而可以全面的评价在标准工况下TJA系统的整体性能表现。
图4所示,在试验中定义车辆行驶的方向为X轴,车道的中心线为横向Y轴的0点,纵轴的值代表车辆偏离车道中心线的距离。测试结果显示,测试车辆TJA横向控制能力良好,偏离中心线值在±0.25m范围内,且不会受到前车左右偏离的影响。
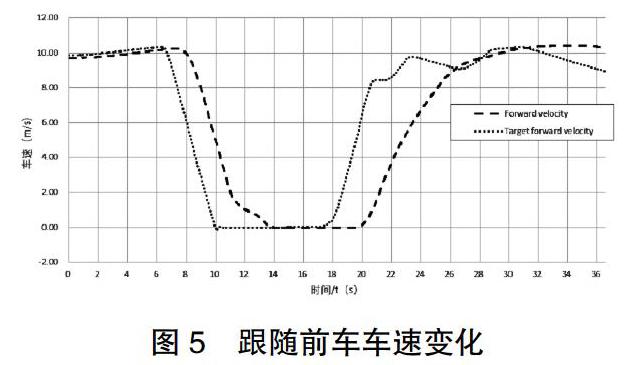
图5为测试车辆和前车在测试过程中速度的变化曲线,如图所示,测试车辆速度曲线平滑,TJA系统纵向速度控制平稳,无速度超调现象;同时对于前车速度的小波动能做到有效过滤,避免造成不必要的顿挫感。
图6所示为两车辆纵向加速度随时间的变化曲线。在该测试工况中,测试车辆的最大减速度约为3m/s?,最大加速度约为2.2m/s?;加减速控制平稳,加速度曲线无过多毛刺和尖峰。纵向跟随能力良好,当前车减速时,约0.8s后测试车开始减速,响应及时。
3 小结
本文通过对TJA系统方案和工作原理进行分析,从而针对性的设置试验方案;并通过实车验证,根据测试结果能客观的评价TJA系统性能。本文所涉及的试验方法和试验场景设定,均为标准场景的场地内试验。但在在实际应用中,被控车辆行驶过程中存在着诸多不确定性,扰动分为“内扰”和“外扰”,“内扰”如车辆载荷、轮胎胎压等,“外扰”包括道路坡度、地面附着、侧向风扰动等。好的控制系统在不同扰动下应当体现出较高的自适应性[5]。因此,如要实现对TJA系统更全面的测试评价,应结合一定里程的公共道路试验,定义明确的考核点,从而在不同类型的真实交通流中,评价TJA系统的性能表现和鲁棒性。
参考文献
[1] F416.471.博世市场调查:驾驶员辅助系统在中国广受欢迎[J].汽车零部件,2016(02).
[2] 张璇.安全辅助驾驶策略对交通流特性及能耗排放的影响研究[D].北京交通大学,2018(03).
[3] Stefan Luke, Oliver Fochler, Thomas Schaller, Uwe Regensburger- Handbook of Driver Assistance Systems:Traffic Jam Assistance and Automation.
[4] 連辉錦,裴晓飞,陈祯福,杨波.一种融合雷达与视觉信息的目标检测算法[C]//中国汽车工程学会.2019中国汽车工程学会年会论文集.北京:机械工业出版社,2019:100-106.
[5] 王辉,雍建军,王子涵,毛承志,黄璐.车道中心保持控制策略关键技术简述[J].上海汽车2016.
猜你喜欢
河南科技(2022年8期)2022-05-31
中国新技术新产品(2017年2期)2017-01-20
科技传播(2016年16期)2017-01-03
中国新技术新产品(2016年23期)2016-12-26
汽车科技(2016年5期)2016-11-14
无线互联科技(2015年9期)2016-03-05
科技资讯(2015年8期)2015-07-02
现代电子技术(2015年1期)2015-04-13
中国纤检(2015年4期)2015-03-13
