
某型货车平顺性虚拟实验
2020-04-10 06:52乔苗苗李旭川肖星星
汽车实用技术 2020年5期
关键词:货车
乔苗苗 李旭川 肖星星

摘 要:通过对某货车整车参数的详细分析及基于虚拟样机技术和多体系统动力学理论创建的货车前后悬架、转向系、车身等子系统,建立了整车模型和四立柱试验台,并且基于专业软件ADAMS/CAR和MATLAB进行了平顺性仿真和分析。文章通过构建某型货车平顺性虚拟实验,可以预测产品的整体性能,进而改进产品设计、提高产品性能。这对启迪设计创新、提高设计质量、加快产品开发周期有重要意义。
關键词:虚拟样机技术;货车;平顺性;整车模型;四立柱试验台
中图分类号:U462.3 文献标识码:A 文章编号:1671-7988(2020)05-166-04
Abstract: through the detailed analysis of the complete vehicle parameters of a freight Car and the subsystem of the rear suspension, steering system and body of the freight Car based on the virtual prototype technology and multi-body system dynamics theory, the vehicle model and four-column test bed were established, and the ride comfort was simulated and analyzed based on the professional software Adams/Car and Matlab. In this paper, by constructing a virtual experiment of ride comfort of a certain type of freight car, the overall performance of the product can be predicted, and then the product design and performance can be improved. It is of great significance to enlighten design innovation, improve design quality and accelerate product development cycle.
Keywords: Virtual prototype technology; Truck; Comfort; Vehicle model; Four-column test bed
前言
近年来,随着人们生活水平的不断提高,对驾驶过程中汽车产生的振动和冲击的大小和范围的要求越来越高。但是由于货车需要装载货物,货车的平顺性研究除了需要考虑驾驶员及乘客的舒适性外,还需要考虑货车在行驶过程中装载货物的完好程度。
对于平顺性的评价方法,一直在向不断探索及完善的方面发展。1985年5月由国际标准化组织ISO发布的ISO 2631-1-1985《人体处于全身震动评估》分为三个部分对人体的振动的一般要求及人体所处于的Z轴垂直方向的频率范围进行了全身性的安全评估。经过十年多的修订及完善,在1997年,国际标准化组织ISO发布了ISO2631-1:1997(E)《人体处于全身振动的评价》,适用于通过支承面传递到人体的振动。在此标准中,规定了人体坐姿受振模型,将人体接收振动时的接触面划分为3个点,一共12个方向的振动。对随机性、周期性及瞬态振动时的全身振动的测量方法进行了规定,并且提供了振动对健康,对身体可能产生的影响[1]。我国对平顺性研究的起步比较晚,主要在国外研究的基础上进行更加深入的研究。1996年,我国基于1985年发布的《人体处于全身震动评估》颁布了GB/T 4970-1996《汽车平顺性随机输人行驶试验方法》。随后在2009年,经过我国汽车国情及地理环境的不同,对原先颁布的国标进行理论和实践上的优化,发布了符合我国国情的GB/T 4970-2009《汽车平顺性试验方法》,它规定了数据的采集及采用加权加速度均方根值作为平顺性实验的评价指标。
汽车的平顺性受汽车本身系统结构的影响和路面随机输入的影响。在汽车这个由多质量共同组成的复杂系统中,对汽车进行简化。影响汽车平顺性的本身系统因素主要包括汽车的前后悬架、悬架阻尼、非悬挂质量、轴距轮距等。通过多体系统动力学理论并结合虚拟样机技术建立影响汽车整车模型,可以对汽车的平顺性进行系统的仿真分析。
1 整车模型关键参数
1.1 几何定位参数
悬架系统作为车辆最基本的组成的部分之一,在缓和汽车在行驶过程中由于路面不平度产生的振动和冲击时有不可替代的作用,保证汽车能够平顺行驶。悬架的几何定位参数和整车的部分几何参数是建模所需的几何定位参数。本文中某货车的前悬架为麦弗逊悬架,前悬架系统的几何定位参数是弹簧,减振器,导向机构及与其配合的部件之间的连接点和运动副的参数。各弹簧,减振器,导向机构总成可以通过此货车的设计图纸查看,同时可以测量各运动副及连接点的配合位置,几何参数。
通过确定麦弗逊前悬架的几何参数,对参数进行分析。将CAD软件中建立的三维实体模型导入ADMAS软件中,使ADAMS软件中的模型坐标系与CAD软件中三维实体模型的坐标系保持一致。在ADMAS软件中选择“Template Builder”模式,完成悬架系统的创建。图1为ADAMS/CAR模型中前悬架系统的硬点坐标。
1.2 质量特性参数
在汽车振动的过程中,系统本身所具有的质量、质心以及转动惯量对汽车的平顺性有重要的影响。在分析研究汽车平顺性的建模关键参数时,整车以及悬架等各部件的质量,质心以及转动惯量等质量特性参数共同决定着汽车在路面行驶时的所产生的振动和冲击的大小。
本文通过将目标车型货车的质量特性参数通过在CAD软件中整车以及悬架各部件的质量,质心以及转动惯量的三维实体模型,将三维实体模型通过接口导入ADAMS/CAR中。此货车各零件的质量特性参数如下表2所示。
1.3 力学特性参数
力学特性参数主要是指汽车的系统或零部件的的刚度,阻尼等参数。本文中前悬架使用的是麦弗逊悬架,它的力学特性参数主要包括具有缓冲减振功能的部件,如螺旋弹簧、橡胶元件的弹性特性以及阻尼特性。同样,考虑到汽车在行驶过程中实际的运动和受力,除了弹簧的弹性特性以及减振器的阻尼特性外,还考虑了减振器的衬套刚度,缓冲块的刚度特性。减震器特性曲线、弹簧特性曲线、减振器上支撑点处衬套刚度曲线、控制臂与副车架连接处衬套刚度曲线、副车架与车身连接处衬套刚度曲线、上缓冲块特性曲线分别如图1-6所示。
1.4 其它关键参数
在进行整车整车动力学仿真时需要按照企业提供的数模以及查阅资料确定其他重要的汽车参数,如汽车满载质量、空载质量、后桥满载质量、后桥空载质量、车轮滚动半径、额定工作压力、后额定制动力矩、最高时速、前轮距、后轮距、轴距等,在进行相关模拟仿真时必须考虑这些因素。后悬架钢板弹簧参数包括板簧线刚度、钢板弹簧长度、满载静止弧高、动挠度、弹簧片数、断面宽度与高度等,这些参数都从该车辆生产企业白日做梦的数据中查找。
2 整车模型的构建
由于汽车是一个非常复杂的系统,在 Adams/Car环境下建立汽车的整车模型时需要对汽车系统进行一定程度的简化。在本文中,汽车的简化部分包括:各运动副间的摩擦力忽略不计;除了轮胎,弹簧,减振器,橡胶元件,汽车的其他部分元件当作是刚体,不考虑它们的变形;忽略发动机及传动系产生的振动对汽车平顺性产生的影响。整车模型的构建包括后悬架建模、麦弗逊悬架的建立及其它子系统的建立。
在ADAMS软件中创建子系统,并根据表1所提供的硬点坐标在ADAMS软件中创建硬点及新建钢板弹簧子菜单。修改钢板弹簧属性,在General选项卡中,修改钢板片数为4、弹簧夹数为0、默认片与片摩擦系数为0.0、影响指数设置为2.1、影响距离为0.0。在Leaves选项卡中,Auxiliary Leaf Flag均设置为No,钢板前端长度分别为650、525、405,317.5。后端长度分别为785、635、480、342。弹性模量设置为2.00E5,其他参数设置为系统默认值。全部设置完毕后生成后悬架,保存钢板弹簧模型为tpl文件。
悬架的建立包括创建各部件、创建通讯器及创建麦弗逊悬架上的链接副。动car模块,进入模板编辑器模式,建立悬架子系统模板后,分别创建下前控制臂的三个硬点,在新建窗口输入硬点名称和硬点坐标,依次按照上面方法建立创建转向节、轮毂、驱动轴等部件。创建麦弗逊悬架上的链接副包括创建副车架和控制臂之间的回转副,减震器上端的十字万向节,转向节处的回转副和球副,依次在CARSIM相应模块中新建这些部件。
此外 Adams/Car还应包含一个测试台。在开环、闭环和准静态分析中必须选择:MDI_SDI_TESTRIG。根据企业提供的数模以及查阅资料确定此次整车动力学模型所包含的子系统包括前悬架子系统,后悬架子系统,转向系子系统,前轮子系统,后轮子系统,车身子系统,制动系子系统,传动系子系统,发动机子系统。创建的货车动力学模型如图7所示。
3 基于四立柱试验台的整车平顺性仿真分析
3.1 正弦输入平顺性仿真分析
与其他整车试验不同,平顺性试验需要在四立柱试验台上完成。因此需要在原整车模型的基础上搭建试验台。进入标准用户界面打开之前建立好的整车总成模型,获得四立柱试验台整车模型。
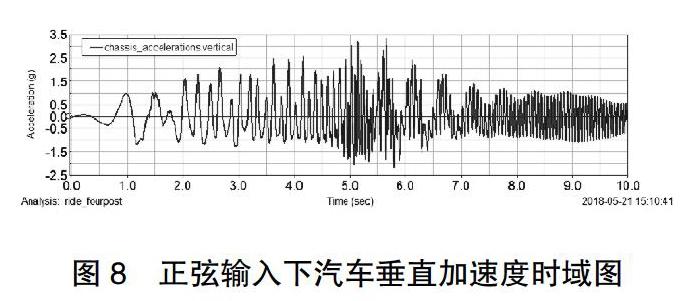
设置仿真参数,选中已打开的四立柱试验台,设置模拟时间为10秒,仿真步数设置为50,输入信号为正弦位移输入,频率为0Hz~20Hz(汽车固有频率大致为5~6Hz)。波峰值调整为50mm,四车轮同步输入,然后开始仿真实验。
根据国标GB/T 4970-2009规定,在脉冲输入行驶的情况下,当振动波形峰系数小于9时,脉冲输入行驶主要通过座椅最大(绝对值)加速度响应和车速v的关系评价,在此具体公式省略。因此,只需求出车身加速度az的时间历程,得到它的峰值大小即可。正弦输入下汽车垂直加速度时域图如下图8所示。
3.2 随机路面输入下的整车平顺性仿真分析
本次随机路面输入下的整车平顺性仿真先用的是长度为1000m的水泥混凝土路面,路面的类型包括光滑沥青路面,粗糙沥青路面,光滑水泥混泥土路面,水泥混泥土路面,粗糙水泥混泥土路面总共5大类。设置白噪声空间功率谱密度,在MATLAB软件中生成随机路面。
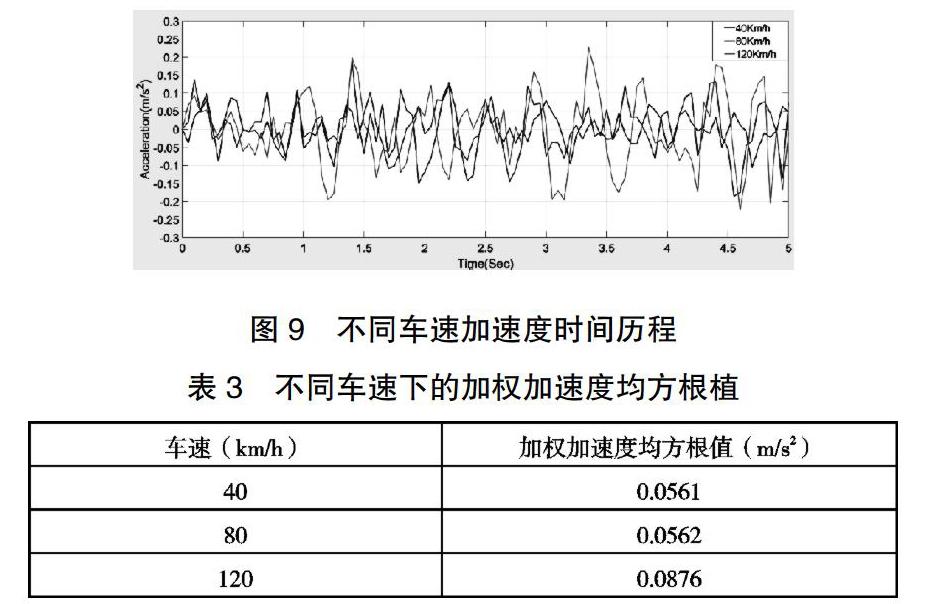
设置道路轮廓,左右轮输入均为Road.rsp,分别在40Km/ h、80Km/h和120Km/h下运行仿真,得到仿真结果。如下图9所示为40Km/h、80Km/h和120Km/h三种不同速度下的加速度时间历程。
同时,根据GB/T 4970-2006规定,需要求得车身垂直加速度时间历程进行频谱分析得到加权加速度均方根值进行平顺性分析。如下表3所示为40Km/h、80Km/h和120Km/h三种不同速度下的加速度的时间历程及不同速度下计算的加权加速度均方根值。
根据GB/T 4970-2009的评价方法,在三个不同车速下汽车的加权加速度均小于表1.2中的0.315,仅为0.05左右,人体在这样的加速度下感觉良好。即人体主观感觉为没有不舒适,則该汽车在混凝土路面上以40~120km/h车速行驶时平顺性良好,符合测试前估计。
4 总结
本文利用虚拟样机仿真技术在Adams/Car中分别建立目标汽车后悬、转向系、车身、动力系等子系统,然后完成搭建货车四立柱试验平台。按照最新国标GB/T 4970-2009《汽车平顺性试验方法》分别在正弦输入和随机不平路面输入的情况下分析汽车车身的三个方向即xs、ys、zs的加速的时间历程,使用Matlab处理数据得到垂直方向加权加速度频谱分析图并求得加权加速度均方根值,根据客观评价标准评价该货车平顺性。通过本文可得此货车在混凝土路面上以40~120km/h车速行驶时平顺性良好。
參考文献
[1] 余志生主编.汽车理论.北京:机械工业出版社,2006.
[2] 陈军编著.MSC.ADAMS技术工程分析实例[M].上海:中国水利水电出版社,2008.
[3] 陈立平等编著.机械系统动力学分析及ADAMS应用教程[M].清华大学出版社,2005.
[4] 王国权著.车辆平顺性虚拟试验技术的研究[D].中国农业大学, 2003.
[5] 石博强编著.ADAMS基础与工程范例教程[M].中国铁道出版社,2007.
[6] 陈士安,何仁,陆森林.汽车平顺性评价体系[J].江苏大学学报(自然科学版), 2006,27(3):229-233.
[7] 卢海峰,李明,李军.汽车平顺性分析与评价系统软件[J].重庆大学学报,2005,28(6):12-14.
[8] 万里翔,许明恒.汽车行驶平顺性评价方法的研究[J].西南交通大学学报,2001,36(1):71-74.
[9] 乐巍,张孝祖,等.汽车四自由度半主动悬架阻尼模糊控制的方法[J].江苏大学学报(自然科学版), 2003, 24(1):55-59.
[10] 姚亮.基于虚拟样机技术的某军用专业车平顺性研究[D].南京理工大学,2006.
[11] 王国强,张进平,马若丁.虚拟样机技术及其在ADAMS上的实践[M].西安:西北工业大学出版社,2002.3.
[12] 张德丰编著.MATLAB R2015b数值计算方法[M].清华大学出版社,2016.
[13] 刘夫云,伍建伟,景晖,et al.Truck smoothness stability simulated analysis method: CN 104166772 A[P].2014.
[14] Shen S,Fang Z,Zhang X,et al.Optimal Design of Guiding Mechan -ism and Rubber Bushing Based on Riding Smoothness of Air Suspension[J].Mechanical Science & Technology for Aerospace Engineering, 2012.
[15] Knight T H. BUNK FOR A TRUCK CAB SLEEPING BERTH: US, US 3698022 A[P].1972.
猜你喜欢
数学大王·低年级(2019年12期)2019-08-14
少年文艺·开心阅读作文(2018年2期)2018-01-19
中老年健康(2016年7期)2016-07-29
为了孩子(孕0~3岁)(2001年14期)2001-08-07
