
基于PROFINET IO的PLC与工业机器人通信研究
2020-04-10 06:52吴玉文朱晔夏伟
汽车实用技术 2020年5期
关键词:工业机器人
吴玉文 朱晔 夏伟

摘 要:在智能制造生产线中,工业机器人可以完成焊接、喷釉、装配、码垛等任务。总控通过PLC给工业机器人下发任务,并采集工业机器人的状态信息。文章结合某条典型的智能制造生产线,从应用的角度,研究了基于PROFINET IO工业以太网的通讯方法,实现了S7-1200 PLC与多台ABB机器人之间的通信。
关键词:PLC;工业机器人;PROFINET IO
中图分类号:TP249 文献标志码:B 文章编号:1671-7988(2020)05-187-03
Abstract: In the intelligent manufacturing line, industrial robots can complete the tasks of welding, spraying glaze, assembling, stacking and so on. The main controller sends tasks to the industrial robot through PLC, and collects the status information of the industrial robot. Based on a typical intelligent manufacturing line, this paper studies the communication method based on PROFINET IO Industrial Ethernet from the application point of view, and realizes the communication between s7-1200 PLC and several ABB robots.
Keywords: PLC; Industrial robots; PROFINET IO
前言
柔性制造系统(FMS)是在计算机统一控制下,由物料自动输运和装卸系统将若干台数空加工设备连接起来,构成适合于多品种、中小批量生产的一种先进制造系统[1]。在柔性制造系统中,工业机器人应用越加广泛。通过工业机器人可以完成焊接、喷釉、装配、码垛等任务。目前大部分柔性制造系统的控制思路是,总控通过PLC给工业机器人下发任务,并采集工业机器人的状态信息。因此确保PLC与工业机器人之间的通信流畅与稳定是非常重要的。
ABB机器人作为主流的工业机器人,提供了标准的专业接口,这让相关系统的集成工作变得简单[2]。西门子可编程序控制器在我国应用广泛,其中,S7-1200设计紧凑、组态灵活且集成的以太网接口可用于与计算机、人机界面和其他PLC的通信[3]。
西门子PLC和ABB工业机器人作为当前常见的柔性制造系统的重要组成部分,两者间的通讯是关键技术之一。
1 PROFINET IO
工业以太网(Industrial Ethernet)是一种基于以太网的工业通讯模式,它遵循国际标准IEEE802.3。其材质的选用、产品的强度和适用性方面应能满足工业现场的需要[4]。相关调研表明,大约四分之三的工业以太网使用Ethernet IP,PROFINET,或Modbus TCP。
PROFINET由PROFIBUS国际组织(PROFIBUS Interna -tional,PI)推出,是新一代基于工业以太网技术的自动化总线标准,用于实现工业以太网的集成和一体化的自动控制解决方案[5]。PROFINET分为PROFINET IO和PROFINET CBA两种。其中,PROFINET IO用于分布式I/O自动化控制系统,其工作性质类似于PROFIBUS-DP,但数据传输速率高于后者。S7-1200 CPU提供一个PROFINET端口用于通过PROFI -NET网络通信。
2 基于PROFINET IO通信
图1为我单位研发的智能制造系统,其毛坯件为两种,分别为圆柱形工件和方形工件。该系统含有三台工业机器人,分别为机床上下料机器人、雕刻机器人和装配机器人。其中,机床上下料机器人包含外部轴,其任务有两个,一是将输送链上的工件放置到数控车床和加工中心进行加工,二是将机床加工过的工件放置到雕刻单元进行雕刻;雕刻机器人用于零件的雕刻;装配机器人用于两个零件的装配。
三台不同型号的ABB工业机器人与S7-1200 PLC通过Anybus X-gateway通信。Anybus X-gateway允许连接PROFINET设备或网络到许多其他的现场总线或工业以太网网络。其能复制两个方向的I/O数据,因此可实现两个网络间的数据交换。其与所有主流PLC兼容,配置简单,无需编程。
西门子S7-1200 PLC通过Anybus模块和ABB机器人DeviceNet主从通信,Anybus模块做DeviceNet主站,多台ABB机器人做DeviceNet从站。S7-1200 PLC做Anybus模块的PROFINET IO主站。
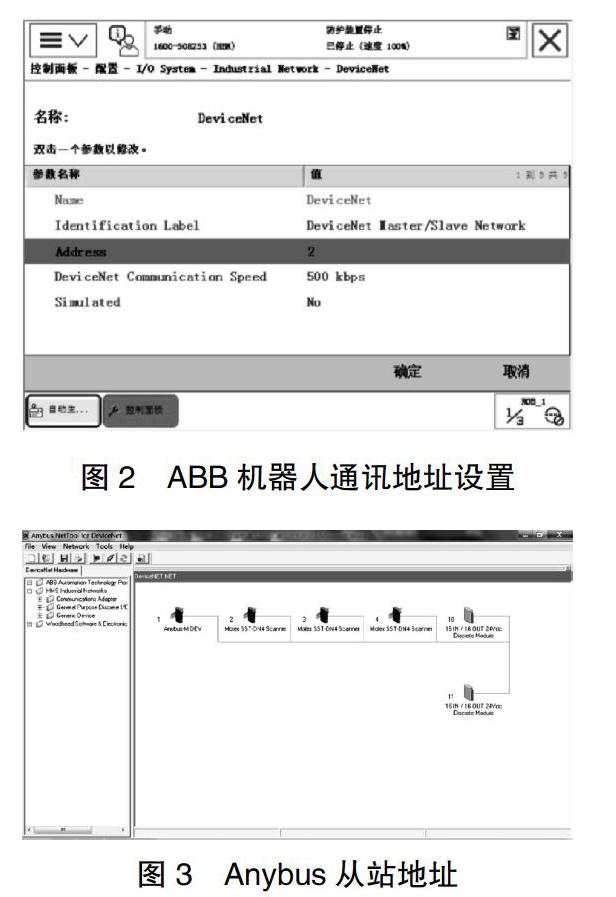
博途软件组态Anybus模块,需要先安装Anybus模块GSD文件,并根据实际通信数据的多少,选择通信输入/输出的长度,这里设置IO为200-263。修改 ABB机器人Device Net通讯地址,三台机器人地址分别为2、3、4,如图2所示。
然后进行Anybus模块配置。打开Anybus Configuration Manager - X-gateway軟件,选择 Upper 和 Lower端的协议类型,分配 PROFINET IO端的通讯数据长度,与 PLC组态中一致。然后,利用局域网连接并将配置下载入模块。
打开Anybus NetTool for DeviceNet软件,安装ABB机器人的 EDS 文件。计算机需要安装Robot Studio或者从其它已安装Robot Studio的电脑中复制EDS文件。创建新连接后,所有的从站会显示在界面中。2-4是机器人DeviceNet通信地址,10-11是D652 DeviceNet地址。操作Anybus M-DEV设置各个机器人数据长度,这里均设置成16个字节,下载并测试通信情况。
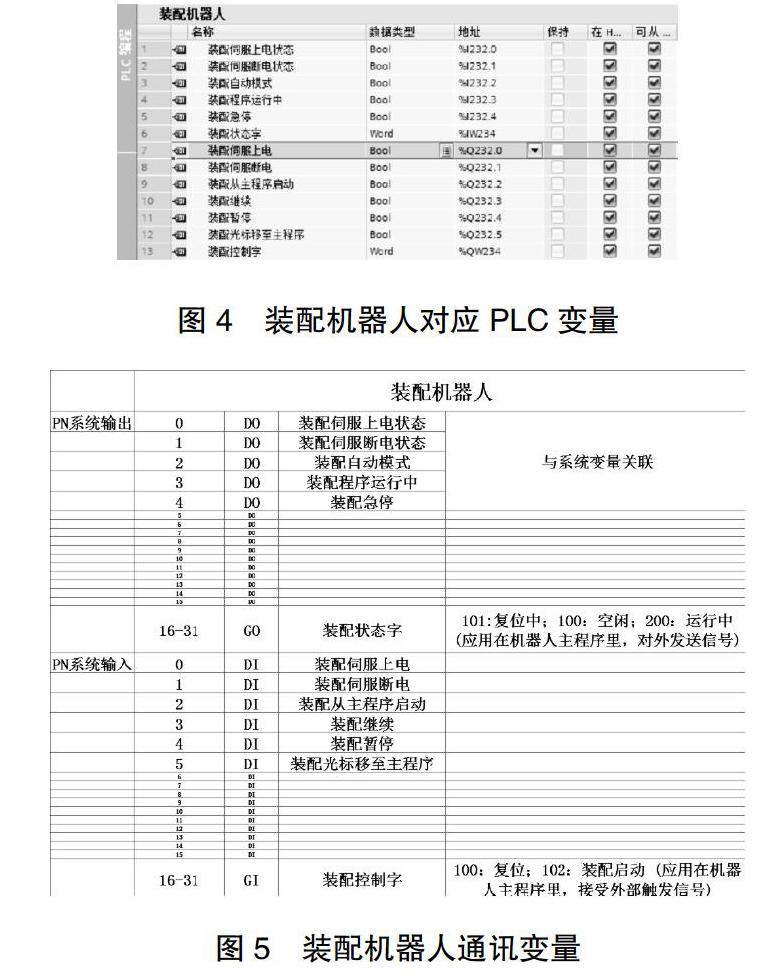
机器人接收来自PLC的运行指令,向PLC反馈本身的运行状态,向PLC发送需要转发的指令,并接收转发回的其它设备状态,因此机器人端的通讯变量与PLC端的变量应一一对应。以上述装配机器人为例,前两个机器人各占16个字节,装配机器人IO从232.0开始,如图4所示。机器人中通讯变量如图5所示。
4 结语
笔者经过研究发现基于PROFINET IO的PLC与工业机器人的通信方式,虽然需要通信硬件模块,如Anybus X-gateway,但其传输数据量大且信号传输稳定,适用于要求较高的场合。另外,这种通信方式配置简单,无需编程,适用于几乎所有型号的ABB机器人,可以较为方便的用于改
造当前总线式自动化生产线。其他型号的工业机器人和PLC之间的通信也可以参照本文所述的方式。
参考文献
[1] 王隆太.先进制造技术[M].北京:机械工业出版社,2015:143-146.
[2] 张德燚,李阳.ABB机器人在自车身焊装设备中的应用[J].汽车实用技术,2017,42 (3) :59-60.
[3] 廖常初.S7-1200 PLC编程及应用[M].北京:机械工业出版社,2010: 3-10.
[4] 陈凌凌,陈以.工业以太网在工业控制网络中的应用与发展综述[J].中国科技信息.2007,(18):147-148.
[5] 王斌,曲杰,张国旭,等.PROFINET总线技术在西门子TIA博途软件中的应用[J].锻压装备与制造技术.2015,(6):79-83.
猜你喜欢
科技创新与应用(2016年34期)2016-12-23
汽车科技(2016年6期)2016-12-19
科技创新导报(2016年21期)2016-12-17
中小企业管理与科技·下旬刊(2016年10期)2016-11-18
科技视界(2016年18期)2016-11-03
企业导报(2016年13期)2016-07-19
