
基于ZigBee无线通讯的自动搬运车辅助驾驶方案设计
2020-04-13 02:29黄毅杨伟吴浩宇
机械 2020年2期
黄毅,杨伟,吴浩宇
基于ZigBee无线通讯的自动搬运车辅助驾驶方案设计
黄毅,杨伟,吴浩宇
(西华大学 机械工程学院,四川 成都 610039)
自动搬运货车为车间现代化生产物流带来了便利,但在车际通讯方面仍存在一定缺陷。提出一种基于ZigBee无线通讯方式的厂房自动搬运车辅助驾驶设计方案,对方案中的车载交互单元和无线控制单元进行了设计仿真和实际开发,并通过实验验证方案的可行性。该方案可对潜在发生的危险状态进行判断和预警,有效避免事故的发生,一定意义上实现了智能交通中的安全预警自动化,为特定场合安全驾驶系统的发展做出一定的探究,并提供一种新的思路。
辅助驾驶;无线通讯;ZigBee
在现代化生产加工过程中,物流环节占据较长时间,为进一步提高生产效率、同时进一步压缩物流成本,自动搬运小车(Automatic Guided Vehicle,AGV)成为越来越多自动化工厂的必要配置,其中在加工制造、医疗、烟草等行业已有了一定的运用[1]。现阶段车间使用的自动搬运货车通常采用的导引方式有:电磁引导、直接坐标引导、磁带导引、激光导航、光学导引及GPS导航等,相关技术的运用及研究通常着重于车辆自身的控制,众多学者在轨迹跟踪、控制系统及控制算法等研究方向上取得了一定成果[2],但针对AGV车际之间实时通信的相关研究则相对欠缺。而有效提升自动搬运货车之间的通信,避免车辆对地位置控制异常时出现危险状况,对于自动搬运货车的安全性提升则十分重要且亟待改善。
本文提出一种基于ZigBee无线通讯的辅助驾驶设计方案,利用ZigBee无线通讯其成本低、功耗小、可靠性高等特点以实现车际之间行车数据等关键信息的交互,及时对周围单元的行为进行采集分析、预紧提示,并将数据传输至总控监视平台,进行全面的监测控制,从而实现安全辅助驾驶作用。将此运用于厂区自动搬运货车中,能够有效提升车辆行驶过程中的信息交互能力,为车辆的驾驶安全提供更加可靠的保障,同时也为车间其他人员提供更多的安全信息提示,这为车间智能化发展及AGV车际通讯提供了一种新的思路。
1 方案原理及总体设计
1.1 Zigbee技术及相关理论
ZigBee技术是基于IEEE 802.15.4标准开发的无线协议,其中物理层和MAC层具体由协议负责,而网络层和应用层则由ZigBee联盟负责制定。ZigBee技术具有成本低、功耗小、低复杂度、高性价等特点,得以在工业领域得以广泛应用[3]。另外,ZigBee技术因其网络拓扑结构的特点使得节点的自组网功能明显优于其他现场无线通讯技术,常见的ZigBee网络拓扑结构包括星形、Mesh网状网及簇状网类型。本文将基于簇状网结构搭建方案,该结构适用于节点众多的系统。
1.2 方案总体设计
本文所设计的辅助驾驶方案结构如图1所示。总检测控制平台作为方案的总控单元,实时监测方案中所有设备的状态并进行有效控制。总监测控制平台数据均来自服务器,服务器端与车间网关(GateWay)节点通过TCP/IP协议通讯进行数据交互。网关节点与路由(Router)节点及路由节点之间则由ZigBee通讯进行自组网,本方案中Router节点将由各自送搬运货车担任。最终各个运送目标位置将作为目标(Target)节点。
(1)总检测控制平台。是方案的主监控单元,对方案整体进行数据的采集分析和监测,通过数据的采集和记录可以有效安排运输任务并检测各单元状态。
(2)网关(GateWay)节点。每个车间配置一到数个网关节点作为车间内网络协调器,负责对车间中运送货车进行网络发起和维护,从而保证运送货车之间网络的有效建立,并可与总控监测平台及服务器进行有效数据传输。
(3)路由(Router)节点。每个运送货车将自为一个路由节点,可有效与周围的运送货车进行信息交互并可实时与网关节点通信,当某些车辆因距离网关节点较远而通讯减弱时,较近距离的搬运货车将可作为路由中继,搭建较远处货车与网关节点的通讯桥梁,保证网络系统的传输稳定性。
(4)目标(Target)节点。搬运货车运送货物的目的地将作为方案的目标节点,目标节点对路由节点即搬运货车之间的通讯可以有效校正搬运货车的运输路线,并辅助定位,从而保障运输的准确性和高效性。
(5)安全监控设备。作为车间安全人员,需要对异常进行有效预警及防护。车间内设置一定量的安全监控设备,如提示器、手机警报等,通过蓝牙(BlueTooth)通信与搬运车辆进行数据交互,方便安全人员有效对区域内运行车辆状况进行掌控,同时对可能出现的危险情况进行预防和处理,避免危险发生。
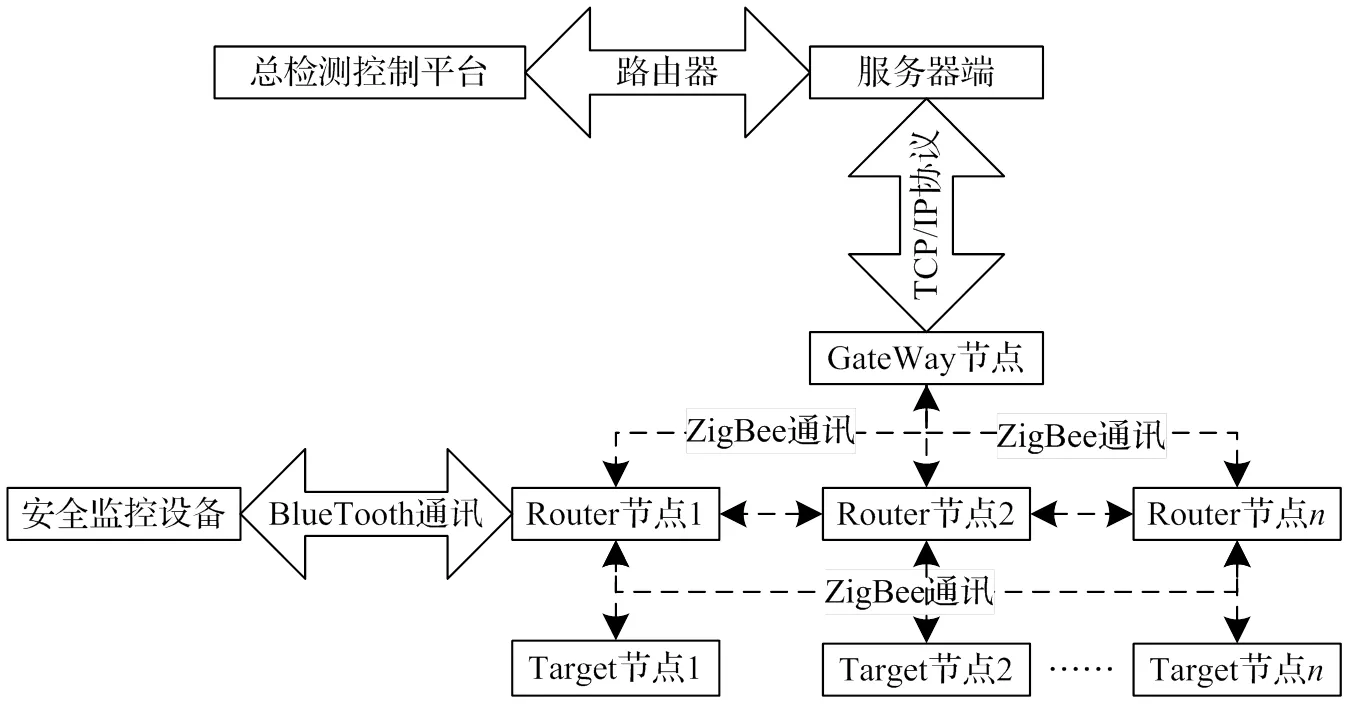
图1 辅助驾驶方案结构
方案中自动搬运货车单元的信息交互将作为一个重要节点,需要担任起辅助驾驶方案中的路由(Router)节点重任,其通讯的质量和效率将决定整个方案的效果好坏,因此对自动搬运货车车载单元(OnBoard Unit)进行了关键设计,其结构如图2所示。
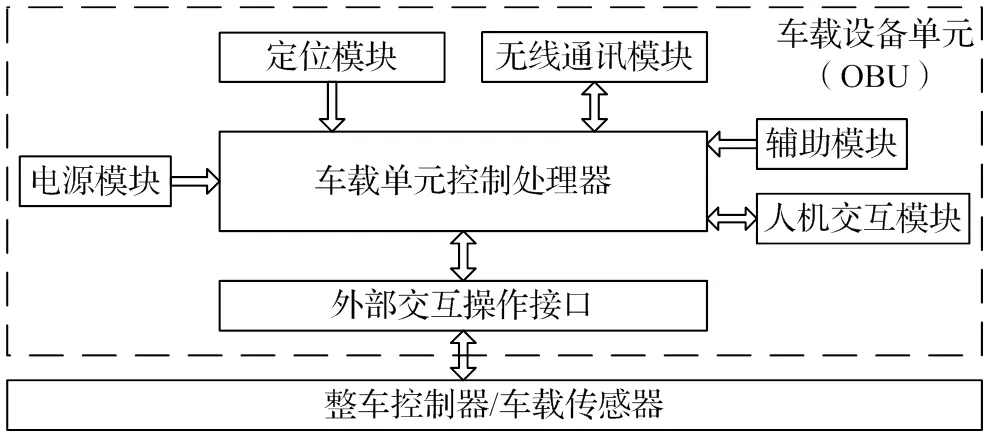
图2 车载设备单元结构
车载设备单元中主要集成了定位模块、无线通讯模块、辅助模块、人机交互模块、外部操作接口模块、车载单元控制处理器、外部交互接口及电源模块几大主要部分。其中,定位模块主要负责对搬运货车进行自我定位作用,车载单元控制处理器则负责处理整车的行为状态采集、接收信息的解析及紧急制动等整车控制;无线通讯模块主要负责车际之间信息的收发交互以及车与监测设备之间信息交互,车内数据通过现场总线进行数据传输,并提供对外部车辆传感器的交互操作接口以方便对自车更多状态的采集和监控,最终车际之间各车运行状态数据将通过人机交互模块对外进行显示和交互操作。根据该车载设备单元整体结构设计的具体硬件实施方式如图3所示。
车载设备单元硬件设计中,依据功能划分的各个模块分别集成了多种功能。辅助模块负责监控自车运行状态相关数据的采集,主要设备包括:温湿度传感器与气体浓度传感器,负责对货物干燥状态进行检测,如果发生火灾、水淋等险情,温度及气体浓度变化将触发报警机制;超声波测距模块负责对自车周围环境障碍物进行检测和有效避障;定位模块中陀螺仪负责对车辆自身的姿态、航向角等参数进行采集,GPS模块主要对自车进行定位;电子罗盘则对车辆运行的方位及速度、加速度等运动参数进行采集。自车与外部的通讯主要由无线通讯模块负责执行,车际通讯及车与车间网关节点通信由ZigBee模块完成,车与安全监控设备之间交互则由蓝牙模块执行。人机交互模块负责实现人与自动货车之间信息的监控和控制的实施。车载设备单元运行状态参数及操作指令收发通过人机交互界面进行显示和执行。车载设备单元整体的控制逻辑流程如图4所示。车辆无人驾驶状态下的实际路径规划与控制等将由整车控制器处理,本文所设计的辅助驾驶方案不做具体设计考虑。
帕金森病患者因为病耻感更倾向于隐藏负面情绪,掩盖疾病症状,这将加剧心理疾病的恶化。研究发现,30.5%的人会告诉任何他们认为感兴趣的人,11%的人会告诉家人、朋友和同事,33%的人只会告诉家人和密友,19.5%会告诉直系亲属,2.5%不会告诉任何人[19]。大多数帕金森病患者不愿意让人知晓病情,加重患者的羞愧感、尴尬感和孤立感。
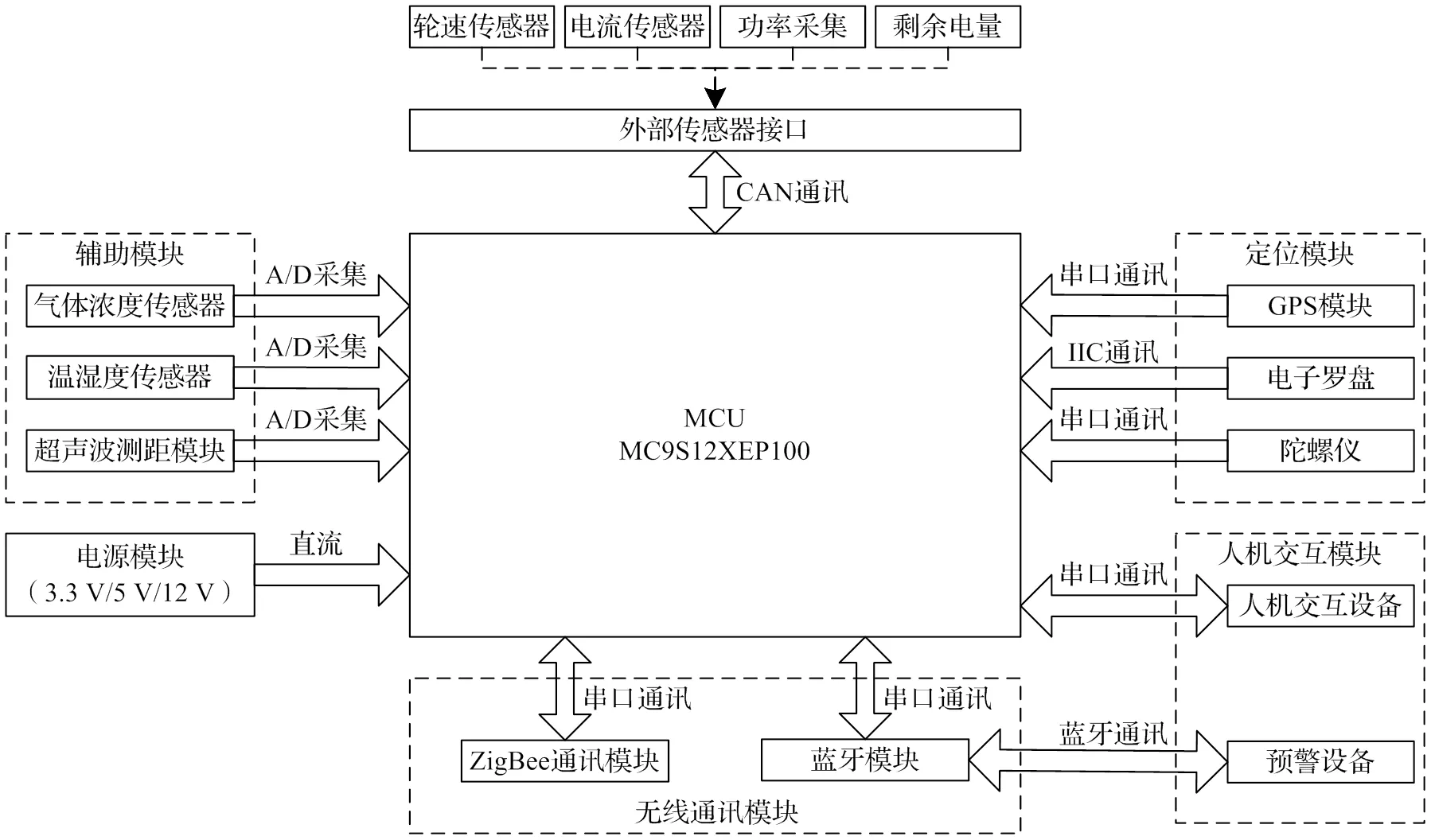
图3 车载设备单元硬件具体实施方式
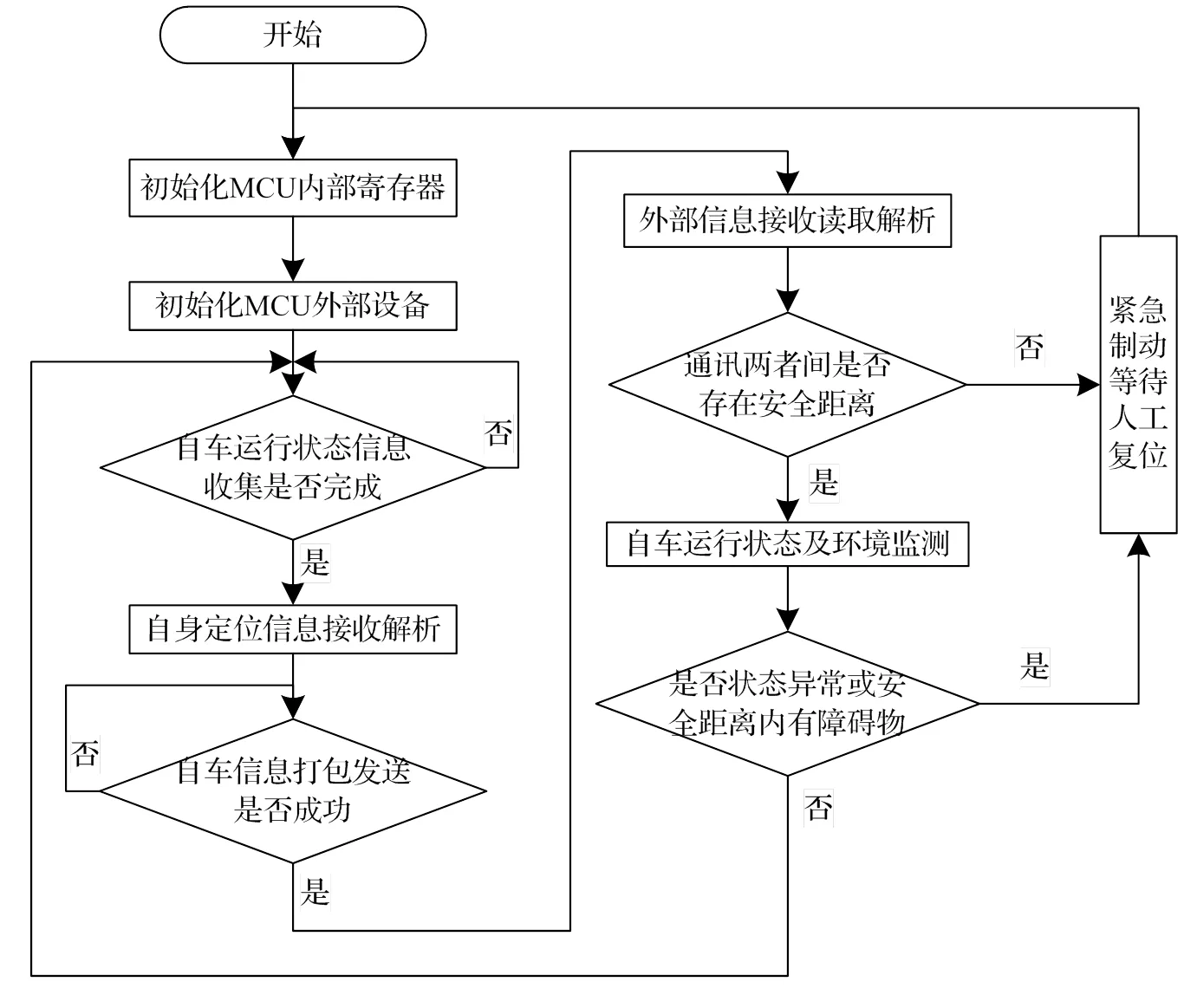
图4 车载设备单元控制逻辑流程
2 方案仿真试验
为进一步分析本文设计的辅助驾驶方案,特对整体方案进行了模型搭建并进行系统仿真,采用仿真手段可以确定实物计算与计算机仿真之间的误差[4]。该仿真系统模拟了两辆相对行驶的自动货车(A车和B车)初始运动速度分别为1和2且保持匀速行驶,在相距一定初始距离0的状态下进行信息的交互,即A车发送自身信息,B车接收并反馈信息,两车在接收数据并解析完成后进行紧急制动操作来模拟计算两车在某一速度下所需的最小安全距离值,仿真出事条件设定如表1所示。
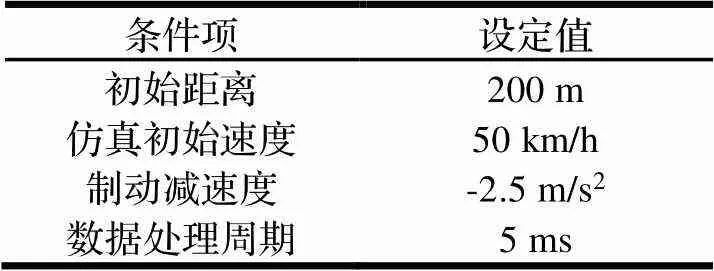
表1 仿真初始条件设定
因此可以理论将两车通讯之间的行驶距离分为如下几个阶段:
(1)A车开始发送自身信息时,两车处于的初始位置0,并保持自身初速度1;
(2)B车接收到A号车发来的消息,两车此时相距的直线距离1,B车速度为2;
(3)B车进行数据解析、处理分析并发出相关信息所耗费时间2后,两车相距的距离2;
(4)A接收到B车反馈来的数据时,两车相距的距离3;
(6)最终两车停下来相距距离5。
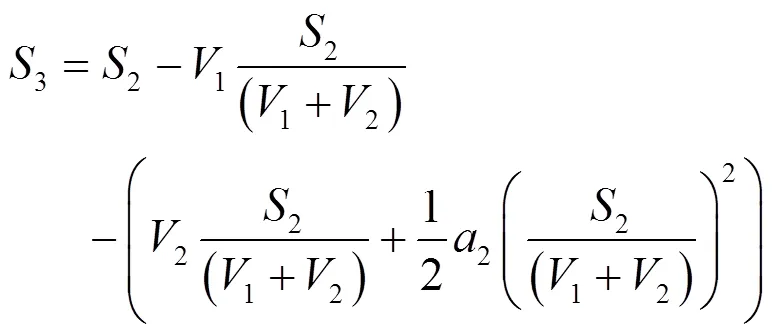
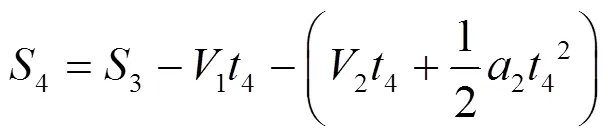
根据上述描述,假定两车信息发送先于操作处理,且数据处理周期为5 ms,则2与4都为5 ms即0.005 s。同时为避免在制动过程中运输货物与车发生相对运动而造成不安全制动,本次将两车制动减速度(1和2)设置2.5 m/s2,无线传输速度V设置为光速,最终可以得到上述各阶段距离的关系表达式为:
式中:S为当前阶段两车相距总距离;S-1为上一阶段两车相距距离;S为当前阶段两车各自行驶距离。
根据式(1)并带入两车状态参数可得到各个阶段的位置距离表达式为:
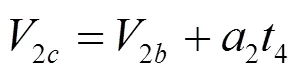
在3时刻B车速度满足条件为:

在4时刻B车速度满足条件为:
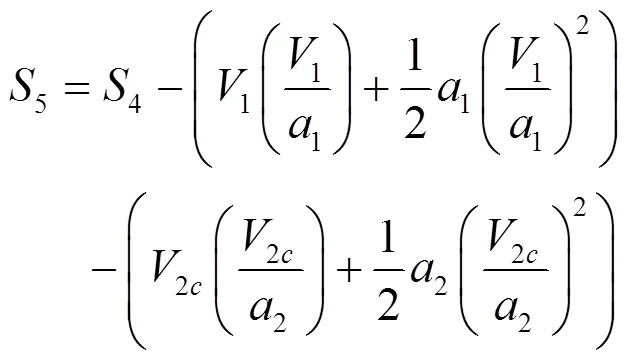
依据上述各阶段距离表达式的数学关系并通过MATLAB/Simulink软件建立起如图5所示仿真系统模型。
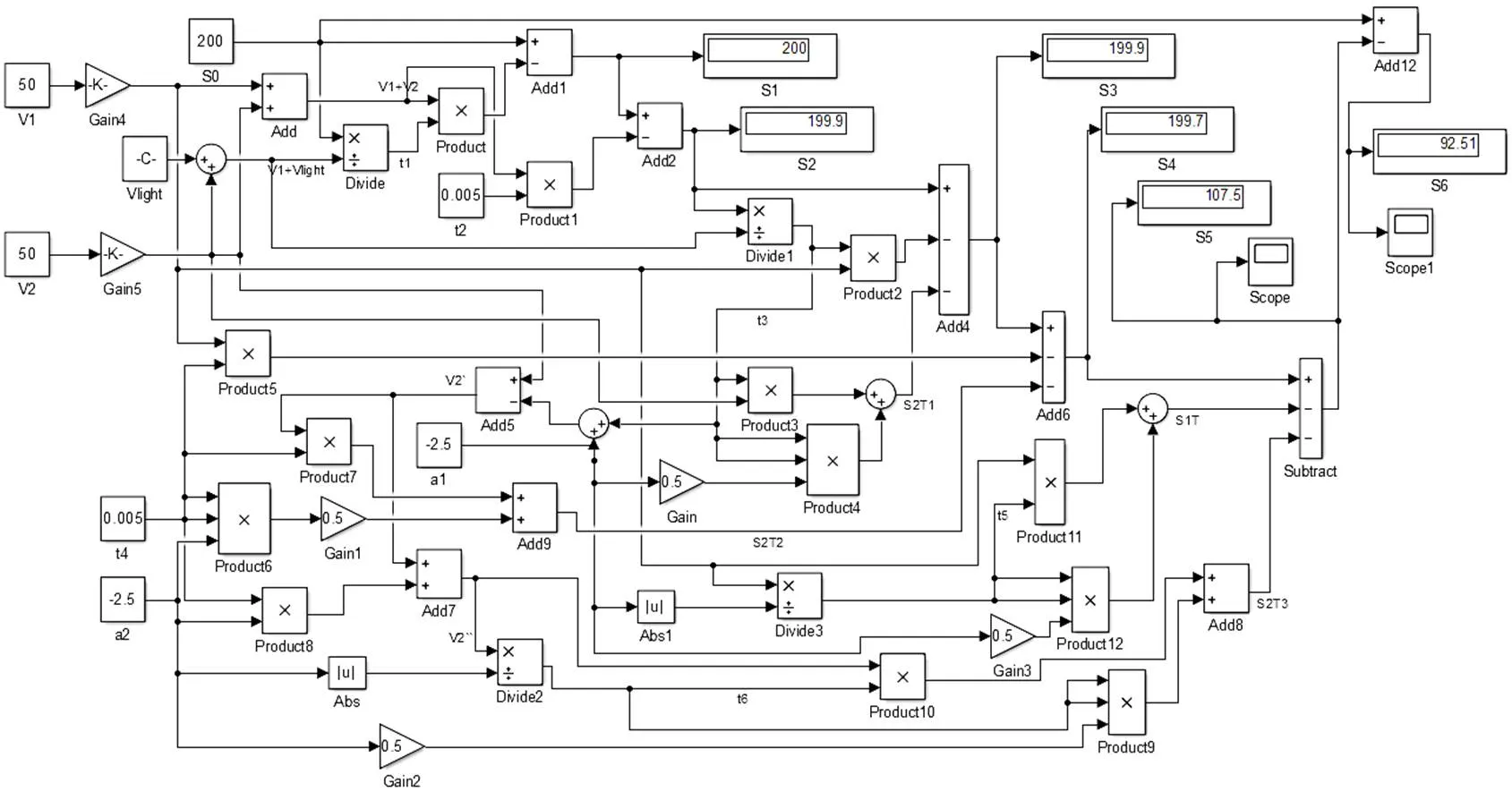
图5 方案仿真模型图
为便于通过实验仿真结果进行验证,在仿真中采用两辆车相对直线行驶的方式,并选取50 km/h作为两车仿真制动初试速度,且两车制动减速度保持大小相同为-2.5 m/s2。最终仿真得到两车在以初始速度50 km/h的条件下相向而行、且在一次通讯后两车分别进行制动的条件下最终两车制动距离为92.51 m,该仿真数据将作为实验数据的参照对比,以验证方案的通信能力是否能够保障运行车辆的紧急制动安全。
3 方案实验分析
为进一步验证方案的工作性能,并与仿真数据形成比较,进行了实车实验,两台试验车分别搭载车载设备单元,进行六个类型的实验项目,具体如表2所示。设置的实验项中,直角转弯会车项测试了方案在两车直角会车时,存在障碍物遮挡两车通讯情况下的通信能力。而直线超车、直线相向会车、直线背离远去则测试了在直线状态下两车各运行状态下的通信能力。直线紧急停车测试了两车在安全预紧状态下的通信及制动安全能力。十字路口会车则测试了路径交叉状态下的方案的通讯能力。
表2 实车实验设定
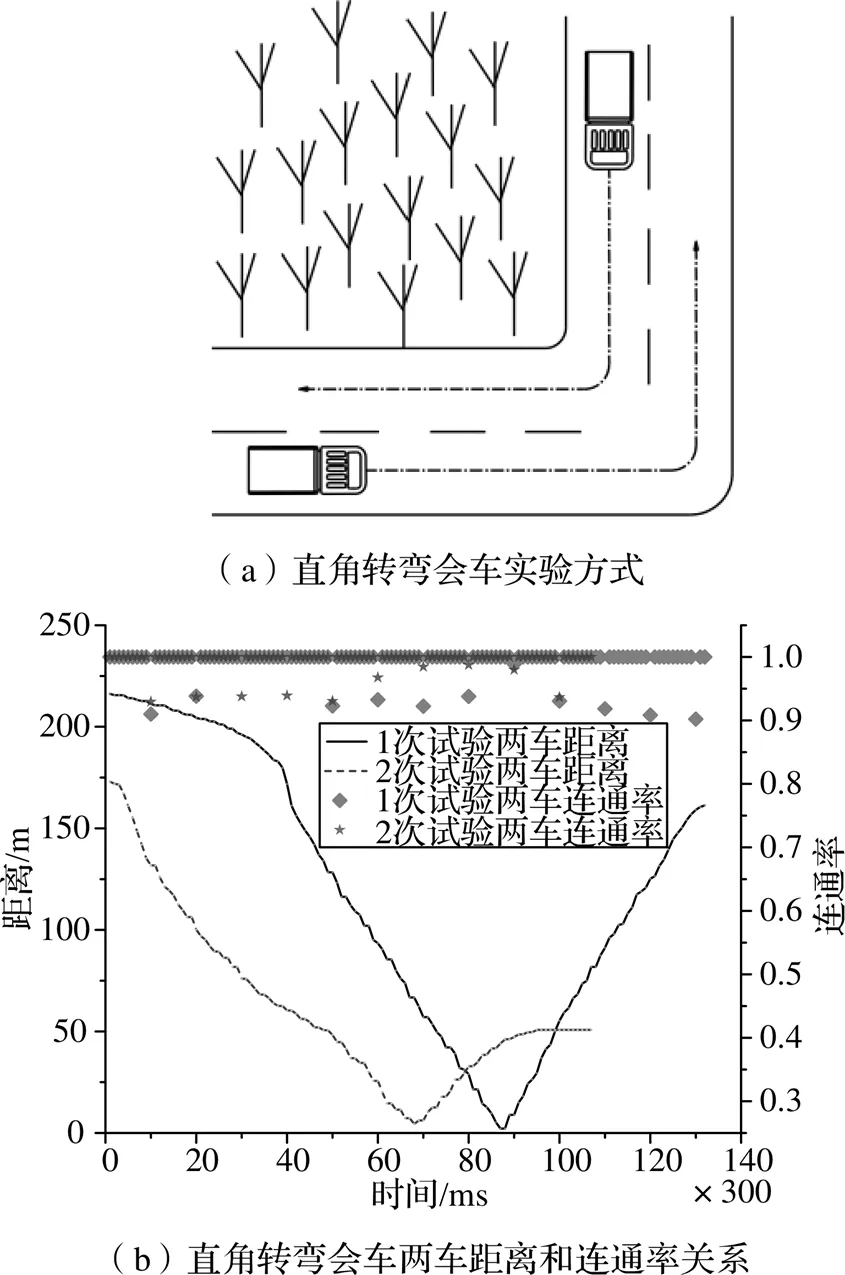
3.1 直角转弯会车实验
如图6(a)所示,两次直角转弯会车实验过程中,因为试验道路一侧存在一片树林,较大程度阻碍了两台试验车之间的通讯信号,以此测试方案在一侧存在障碍物遮挡状态下能否具有良好的通信能力,以验证方案是否能够保证运行车辆之间能够实时完成状态交互以避免紧急情况出现。通过图6(b)可知,两车通信能力因为一侧存在障碍其连通率有所波动,且连通率与两车距离存在正向关系,距离越长,两车连通率会略有下降。但是方案整体能够在200 m直线距离范围内,即使通信车辆间存在遮挡也能够保证90%以上的连通率。图6(c)显示了两次实验中各车的实时速度,两车在两次实验中速度最大值均高于20 km/h,与实际方案运行所搭载的车辆运动速度比较,较为真实地测试了方案在此状态下的通讯能力,数据表明本方案能够满足此状态下的通讯能力。
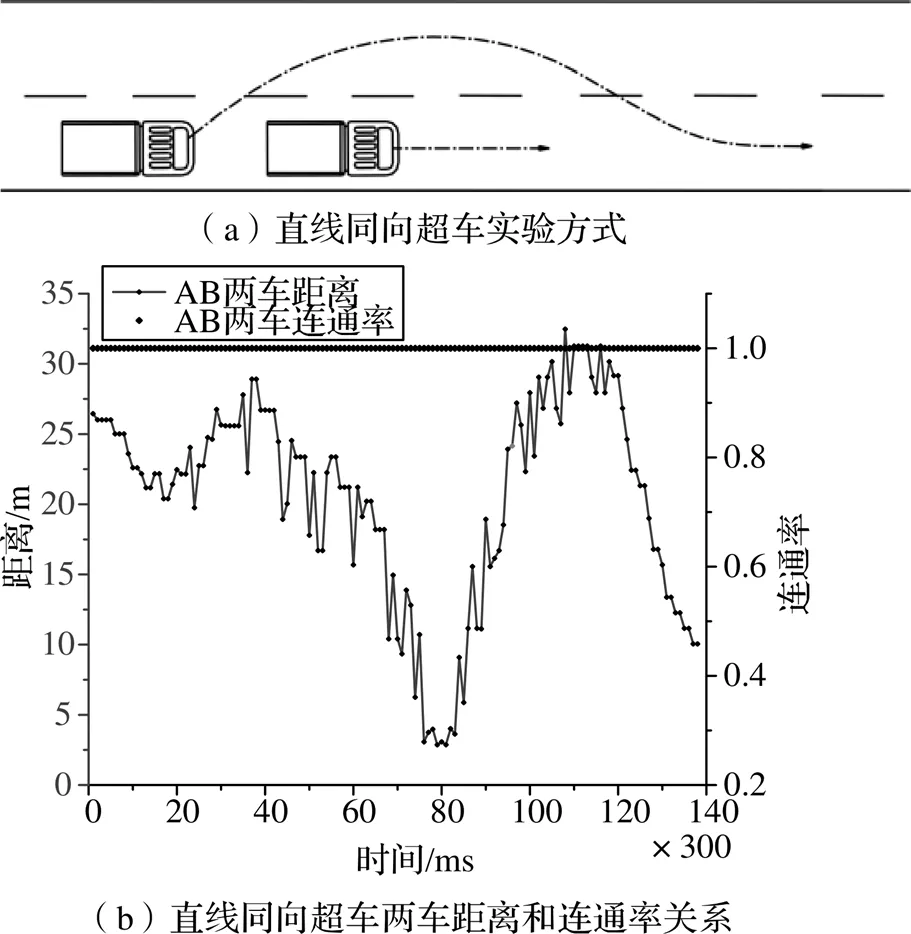
3.2 直线同向超车实验
在直线同向超车实验(图7)过程中,两车初始距离为26.5 m,之后两车分别加速,两车在速度达到30 km/h后A车缓慢降速、B车继续加速至42.1 km/h,并迅速超越A车,之后两车均减速至停止。在此阶段中,两车因距离较短,连通率未出现波动,始终保持在良好连通状态(连通率100%)。数据表明短距离直线状态下,本方案能够保障正常工作速度范围内车际之间信息的良好交互。
3.3 直线相向会车实验
如图8所示,在直线相向会车实验过程中,两车从直线相距456.6 m外相向行驶,行驶过程中两车速度均达到50 km/h以上并保持一定时间,而数据反映,两车距离会影响连通率的高低,当两车在相距400 m以外时,连通率偶尔会出现低于90%的情况,当距离减小后,连通率能够稳定保持在90%以上。试验表明在此种行驶方式下,方案能够保障良好的通信能力。
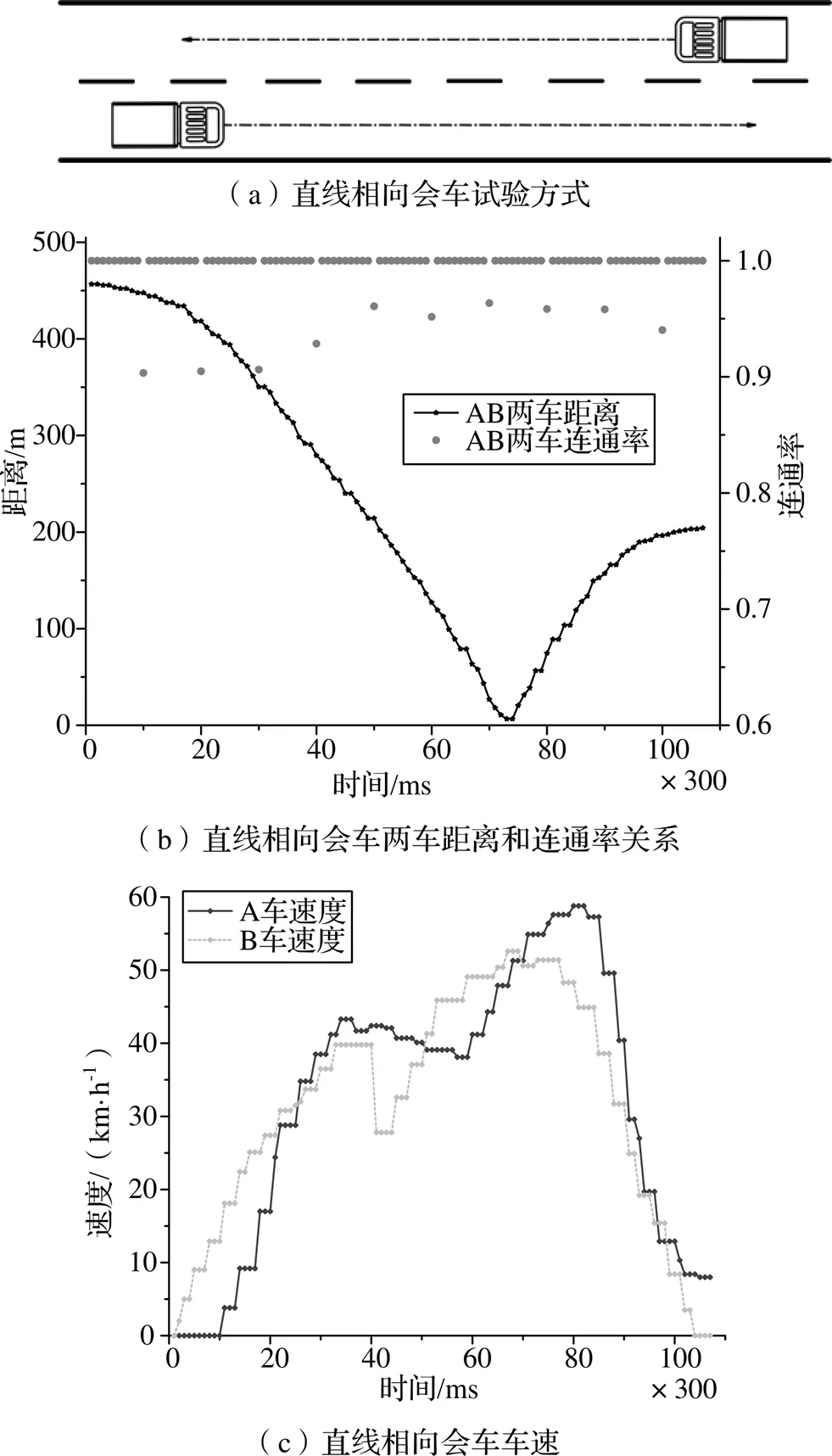
图8 直线相向会车试验方式
3.4 直线背离远去实验
如图9所示,在直线背离远去实验过程中,两车从相距0 m开始向两侧直线驶开,最终实验停止时相距490.3 m,在该区域内,随着距离增长,连通率开始下降,波动范围变大,但整体仍然保持80%连通率以上,这样的距离范围能够保证离去的车辆在一定范围内仍然具有通讯能力,该距离反应了两节点之间的正常通信范围大小,此数值越大就能够有效拓宽方案整体的通讯范围。试验验证500 m的点对点通讯能够保证,当该点作为路由节点事,整体方案能够较大范围能保证各节点之间良好通信。

图9 直线背离远去实验
3.5 直线紧急制动实验
本方案对预紧制动要求较高,故直线紧急制动实验(图10)进行三次,两试验车速度在达到50~60 km/h后迅速制动。表3数据显示,第一次试验两车距离在400 m外,连通率存在一次波动,但整体仍保持在95%连通率以上;第2、3次实验一直保持良好连通,未出现异常波动;三次制动开始速度均高于50 km/h,制动长度在85~130 m,其中三次制动距离长度有所变化主要由于制动过程中的减速度大小略有不同而产生,第二次实验数据与仿真值(92.51 m)较为接近,且方案整体运行效果良好。第三次紧急制动实验中,制动减速度小于前两次,因此最终的制动距离长度有所增加。但方案整体可以保持在50 km/h的初速度紧急制动,最终距离在100 m以内。而在此距离范围本方案可以有效预警,及时通信而避免危险发生。
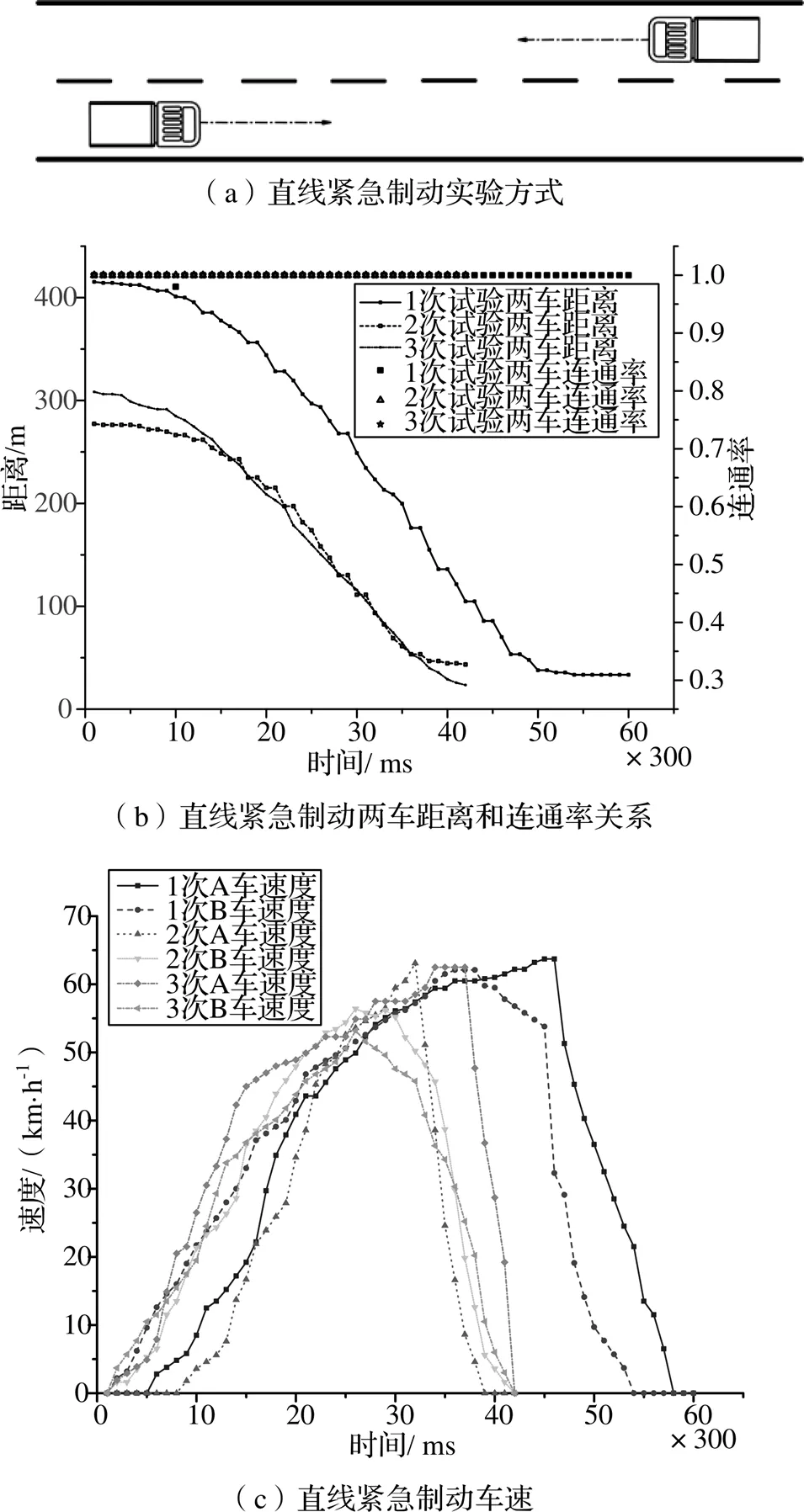
图10 直线紧急制动实验
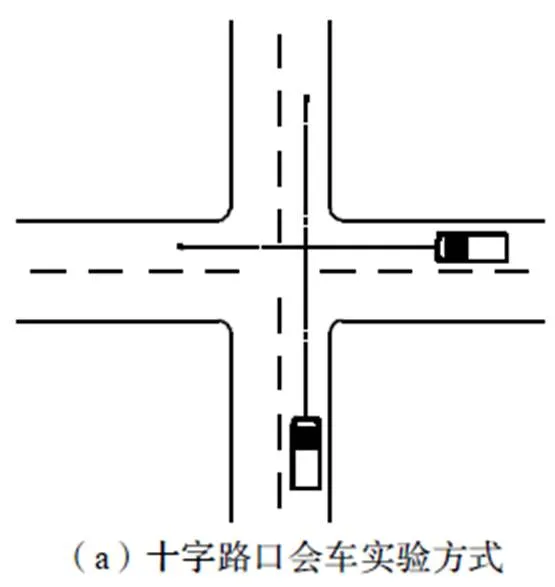
3.6 十字路口会车实验
十字路口会车实验(图11)共进行两次,两次实验最短交叉距离不同,分别为46.2 m和10.6 m,但第一次试验中两车速度差距不大,相对速度变化较小,而第二次试验的时候两车的速度差异较大,因此在该组试验下的连通率随着距离变化比1组较大,但是整体仍能保持在90%以上连通率,所以本方案能够保证运行车辆行驶路径交叉时的通信能力。

表3 制动实验主要数据
4 结语
本文介绍了一种基于ZigBee无线通讯的厂区自动搬运货车辅助驾驶设计方案,阐述了方案总体及各单元的设计方式,同时针对方案的通讯能力进行了仿真预测并以具体实验进行了验证对比。通过多类型实验数据结果验证了本文方案可保障在50 km/h速度范围内即使存在障碍物遮挡条件下,也可保持行驶单元间200 m距离范围良好通讯能力及安全紧急制动能力。因此该方案能够满足多种工况下车际之间通讯需要,能够及时采集信息进行预警,达到良好的辅助驾驶作用,在一定程度上提高了车辆的主动安全性。同时方案增强了车与车单元之间的信息交互,有利于监控活动单元的运行状态,从而提高行车的效率性和可靠性。本文方案可以有效运用于低速状态(车速低于50 km/h)下的各类场景环境,以增强单元之间的通信能力,进一步实现智能化车际通讯,同时也为特殊场地自动驾驶辅助方案的设计提供了新的思路。
[1]赵德云,杨厚华,王哲. 基于模糊神经网络控制的AGV避障路径规划仿真[J]. 机电工程,2010,27(9):27-31
[2]徐航,张依恋,朱瑾,等. 基于模型预测的自动导引车区间轨迹跟踪控制[J/OL]. 控制理论与应用,2019-04-23.
[3]黄衍玺,钟山,吴奇,等. 基于ZigBee的车联网辅助驾驶平台设计[J]. 电子测量技术,2013,36(11):119-123.
[4]刘永强,戴焕云. 铁道车辆动力学模型设计及优化分析[J]. 机械,2018,45(12):3.
[5]陈章进,姚真平,张建峰. 基于ZigBee技术的城市智陈能公交系统设计[J]. 电子测量技术,2014,37(4):38-42.
[6]白金蓬,黄英,江宜舟,等. 驾驶状态实时监测系统设计[J].电子测量与仪器学报,2014,28(9):965-973.
[7]刘文军,樊建席,李春胜,等. 基于ZigBee无线传感器网络的智能交通系统设计[J]. 传感技术学报,2013,26(12):1747-1751.
[8] B.E.Bilgin,V.C.Gungor. Performance evaluations of ZigBee in different smart grid environments[J]. Computer Networks,2012,56(8):2196-2205.
Design of the Assisted Driving Scheme for Automatic Guided Vehicle Based on ZigBee Wireless Communication
HUANG Yi,YANG Wei,WU Haoyu
(School of Mechanical Engineering,Xihua University, Chengdu610039,China)
Automatic guided vehicle brings convenience to modern production and logistics of workshop, but there are still some deficiencies in inter-vehicle communication. This paper puts forward a schematic design of the assisted driving of automatic guided vehicle in the workshop based on ZigBee wireless communication mode, and carries out the design simulation of the vehicle-mounted interactive unit and the wireless control unit of the scheme, and then puts it into development, and finally verifies the feasibility through experiments. This scheme can predict and give warnings of the potential dangers, effectively avoid the accidents, realize the automation of intelligent traffic safety warning, throw light on the development of safe driving system in specific occasions, and provide a new perspective.
assisted driving;wireless communication;ZigBee
U461.91
A
10.3969/j.issn.1006-0316.2020.02.008
1006-0316 (2020) 02-0044-09
2019-09-18
成都市科技项目(2016-RK00-00003-ZF)
黄毅(1993-),男,四川绵阳人,硕士研究生,主要研究方向为智能交通。
杨伟(1965-),男,四川崇州人,博士,教授、硕士研究生导师,主要研究方向为交通运输规划与管理、智能汽车。
猜你喜欢
茶叶通讯(2022年2期)2022-11-15
茶叶通讯(2022年3期)2022-11-11
机械研究与应用(2022年4期)2022-09-15
小学生导刊(2018年13期)2018-11-30
中国交通信息化(2018年12期)2018-03-21
小学生导刊(低年级)(2017年2期)2017-06-10
中国交通信息化(2017年8期)2017-06-06
学与玩(2017年6期)2017-02-16
中国科技信息(2016年19期)2016-10-25
专用汽车(2016年9期)2016-03-01
