
基于频谱响应的伺服转台控制系统设计及改进
2020-04-14 04:50刘钢伍宇花
中文信息 2020年3期
关键词:卡尔曼滤波
刘钢 伍宇花

摘 要:基于经典控制理论和线性系统模型的控制策略无法解决被控对象中存在的摩擦、死区、齿隙等非线性因素的影响,而对伺服转台的控制恰好包括了上述因素。在实际项目中,我们将整个伺服转台作为一个控制对象,采用数字式频响测试仪完成对转台的频率响应测试,采用相关性分析法去除测量噪声,得到转台的开环幅频和相频特性曲线;再利用Matlab系统辨识工具箱完成对转台对象模型的辨识,得到转台的开环传递函数;接下来使用MATLAB的单输入单输出工具箱根据经典控制理论方法对系统作超前滞后校正;最后进行系统仿真测试验证和实物测试验证。在项目实际中,针对系统固有的缺陷采用了卡尔曼滤波来提升系统的特定性能,实际结果也证明了采用此方法的有效性。
关键词:频谱响应 相关性去噪 对象建模 系统辨识 卡尔曼滤波
中图分类号:TP273文献标识码:A文章编号:1003-9082(2020)03-000-02
伺服转台建模和控制策略的研究一般是基于经典控制理论和线性系统模型,这种方法虽然很有效但其无法同时解决转台中存在的摩擦、死区、齿隙等非线性因素对跟踪精度和动态特性等指标带来的不良影响[1] 。在进行控制系统开发时,项目对开发时间要求愈来愈紧迫。如何快速准确地建立控制对象模型、系统的校正以及验证等是设计人员最关心的问题。本文提出了一种解决这个问题的方案,即先采用数字式频响测试仪对光电转台进行频谱响应测试得到对象的频谱响应,利用相关性分析法去除测量等噪声,得到原始的对象开环幅频和相频特性,再根据经典控制理论利用Matlab系统辨识工具箱完成对象模型的辨识,再根据对象模型的特点和系统设计要求使用MATLAB的单输入单输出设计工具箱对系统作超前滞后校正,最后通过仿真及实物测试进行验证。在项目中所采用的工具主要为dSPACE实时系统、Matlab系统辨识工具箱和单输入单输出设计工具箱。
一、被控对象频谱响应测试及模型辨识
大部分的运动控制系统由于受到控制电机时间常数的限制,系统的频宽一般不会超过60Hz。整个系统控制器设计架构如图1所示。
图1 系统设计架构图
在对被控对象进行频响测试时,我们采用的信号生成与数据采集系统为dSPACE实时系统,通过该系统来对被控对象进行扫频和数据记录,在试验中,系统扫描频率选定的范围为系统实际工作频率段1~100Hz,采样频率为2kHz。选定的系统输入信号为,系统的系统输出信号可表示为:,其中为测量噪声。
在项目中,我们使用频响应的相关分析法来去除测量噪声,定义两个量如下:
,
将输出信号代入上述两式经推导后和可以通过下面两式得到:
,
再通過下面两式可以计算得到被控对象模型相应的幅频特性和相频特性。
,
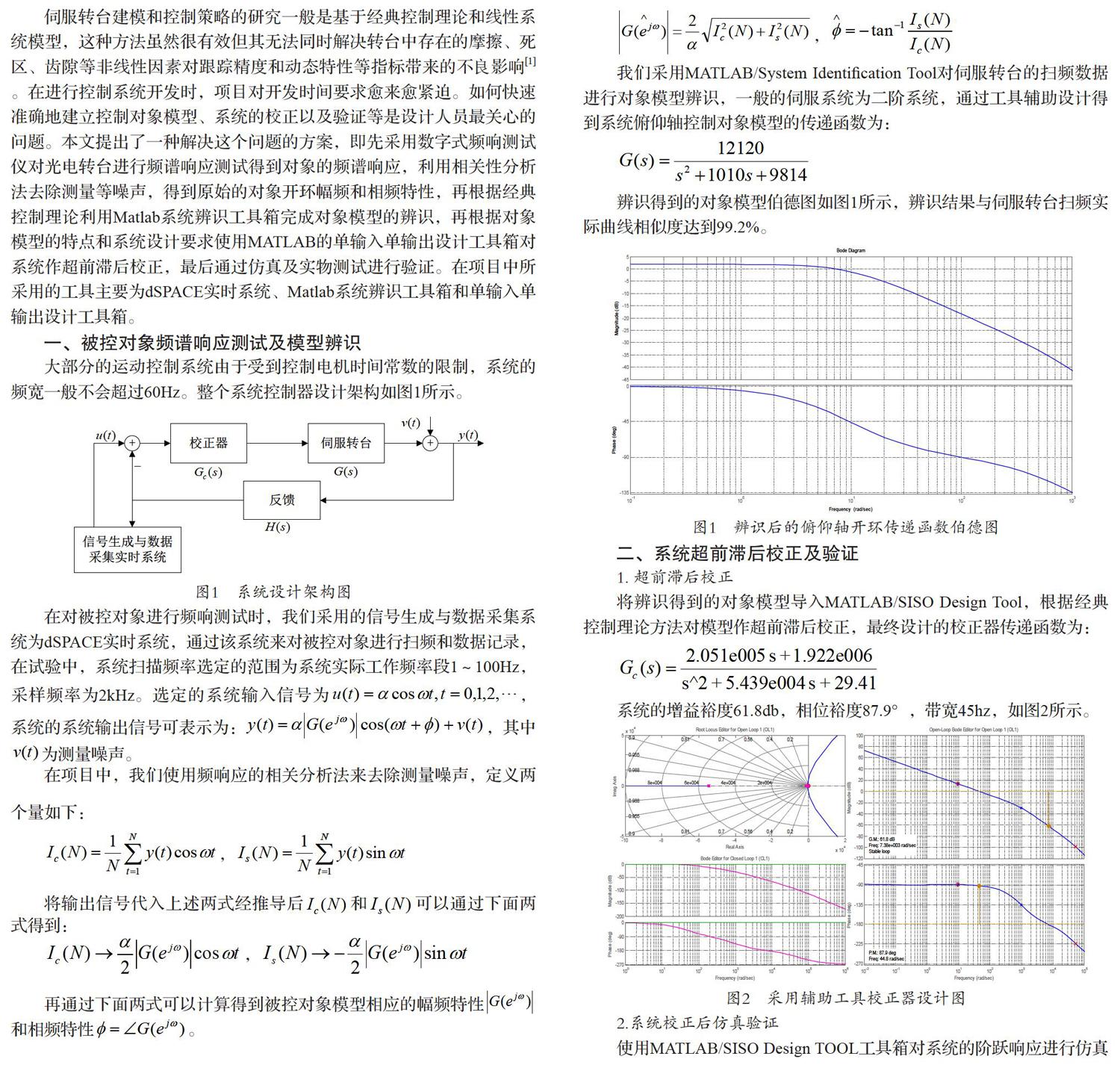
我们采用MATLAB/System Identification Tool对伺服转台的扫频数据进行对象模型辨识,一般的伺服系统为二阶系统,通过工具辅助设计得到系统俯仰轴控制对象模型的传递函数为:
辨识得到的对象模型伯德图如图1所示,辨识结果与伺服转台扫频实际曲线相似度达到99.2%。
图1 辨识后的俯仰轴开环传递函数伯德图
二、系统超前滞后校正及验证
1. 超前滞后校正
将辨识得到的对象模型导入MATLAB/SISO Design Tool,根据经典控制理论方法对模型作超前滞后校正,最终设计的校正器传递函数为:
系统的增益裕度61.8db,相位裕度87.9°,带宽45hz,如图2所示。
图2 采用辅助工具校正器设计图
2.系统校正后仿真验证
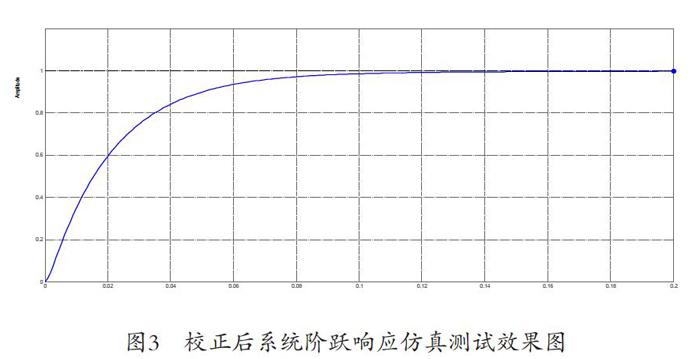
使用MATLAB/SISO Design TOOL工具箱对系统的阶跃响应进行仿真验证测试,得到图3曲线,可以看出系统在收到指令后能够很快的稳定且无超调现象,仿真验证效果如图3所示。
图3 校正后系统阶跃响应仿真测试效果图
3. 被控对象实物测试验证
将上述的设计结果写入伺服控制程序中,再通过dSPACE半实物仿真系统的ControlDesk[3]软件对被控对象进行测试,系统实物性能测试结果如图4所示。
比较图3和图4的曲线可知,系统实物性能测试结果与仿真测试结果相差不大,符合设计的要求。
图4 伺服转台闭环阶跃响应测试曲线
三、对快速目标跟随性能的改进
设计好的伺服系统虽然能够很好地跟随预定的目标,但是也有特例的情况出现。如目标进行高机动和高速运动,跟随的效果就会打折扣。如何在现有的架构上进行改进?在项目中,我们通过采用卡尔曼滤波根据系统实时计算的目标信息来对目标的下一点进行预测,也就是增加提前量来解决快速目标的跟踪问题。图5(左)所示为未采用卡尔曼滤波的跟踪效果,图5(右)所示为采用卡尔曼滤波的跟踪效果。
图5 未采用(左)和采用(右)卡尔曼滤波的跟踪效果
从上面两张跟踪效果图大概可以看出未采用卡尔曼滤波的跟踪在过零线处(也就是目标速度达到最大的时候)的误差要比采用了卡尔曼滤波预测的要大,但是在目标反向的时候,由于采用了卡尔曼滤波预测技术,其对目标反向的动作有滞后的现象,因此在反向处未采用预测的跟踪效果要比它好。实际上,大多数的目标还是沿直线做匀速或加减速运动,因此,采用这种方法还是有很大实际应用价值的。
四、结论
首先,充分借用伺服系统设计辅助工具可以帮助广大工程技术人员快速地对被控对象进行系统模型辨识、校正器的设计和验证。再次,由于被控对象本身固有的特性,针对某些特别的要求,我们可以借助其他的方法(如本项目中所用到的卡尔曼滤波预测技术)来提升特定的性能。本文中所设计的伺服转台控制系统已经在某项目中得到很好的验证,控制性能满足系统的设计指标要求。
参考文献
[1]胡寿松.自动控制原理(第4版)[M].北京:科学出版社,2001.
[2]dSPACEInc.dSPACEUserGuide,DigitalSignalProcessingandControlEngineering[M].dSPACEGmbH.2003
[3]dSPACEInc.ControlDeskExperimentGuide[M].dSPACEGmbH.2005
猜你喜欢
电子制作(2019年23期)2019-02-23
测控技术(2018年12期)2018-11-25
电测与仪表(2017年20期)2017-12-19
北京航空航天大学学报(2017年9期)2017-12-18
中国惯性技术学报(2017年1期)2017-06-09
光学精密工程(2016年4期)2016-11-07
电源技术(2016年9期)2016-02-27
江苏科技大学学报(自然科学版)(2015年4期)2015-12-17
电源技术(2015年1期)2015-08-22
电测与仪表(2015年24期)2015-04-09
