船舶离合器吸合过程中冲击现象的分析和管理措施
2020-04-22 20:27钟琦峰
中国水运 2020年1期
钟琦峰


摘 要:围绕拖轮离合器吸合过程常会出现冲击现象这一问题,本文不仅从离合器的结构和工作原理加以分析,而且从离合器控制系统工作原理和离合器控制逻辑时序电路进一步予以分析,总结出引起离合器吸合过程会出现冲击现象的各种原因。并对预防离合器出现吸合冲击的问题,提出了管理方面的预防措施。
关键词:离合器;冲击;工作原理;控制逻辑
中图分类号:U674 文献标识码:A 文章编号:1006—7973(2020)01-0078-04
1 引言
可回转舵桨是全回转港作拖轮的关键设备,常采用双机双桨的配置方式,以实现拖轮操纵的灵活性。可回转舵桨通过离合器实现机、桨的联结,是舵桨的重要组成部分。港作拖轮作业特点就是辅助大船进出港靠离码头时,离合器频繁合排。据宁波港口作业量统计,拖轮作业每艘次离合器合排次数在30次以上,以每年3000艘次计,离合器离合次数超过9万次。因此,离合器工作的可靠性是保证港作拖轮适航率的关键因素。
为了提高离合器工作的可靠性,管理人员就必须了解离合器的结构和工作原理,掌握离合器控制系统的工作原理和控制逻辑时序,才能对系统中的关键部位实施有针对性的管理措施。
2 离合器结构及工作原理
以“甬港消拖2号”轮为本文分析对象。“甬港消拖2号”轮使用的是卧式铜摩擦片-钢圈滑擦型离合器,该离合器为内置式,与舵桨制造成一体。离合器的控制油没设有独立油箱,来自于舵桨润滑油。离合器结构如图1所示。
当离合器工作时,控制离合器油从控制油进口进入密封腔,当密封腔的油压慢慢升高时,高压油将推动钢圈活塞左移,从而输出轴、摩擦片以及钢圈结合形成摩擦连接。最终将动力力矩传给输出轴,再通过齿轮将力矩传给螺旋桨。当离合器脱开时,密封腔内液压油将通过控制油进口回油箱,失压离合器依靠碟簧的作用复位。
3 离合器控制系统
3.1 离合器控制系统工作原理
离合器控制系统工作原理,如图2所示。Y5和Y10分别是控制离合器合排电磁阀,相互锁。当离合器工作时,Y5电磁阀得电,二位换向阀左位通,液压泵输出的压力油经二位换向阀通向离合器的控制油进口,从而离合器吸合。在离合器吸合的过程中,Y30电磁阀将会得电使得控制阀右位通,将缓冲器接入到控制油管路中,防止离合器吸合过程有冲击现象。SP4压力继电器的作用是反映离合器吸排状态,当压力达到设定压力值(15MP)时,SP4压力继电器触头闭合,表示离合器已吸合,并将状态反馈给控制单元。当离合器脱开时,Y10电磁阀得电,二位换向阀右位通,离合器密封腔的压力油经二位阀直泄油箱,活塞钢圈在弹簧力的作用下右移,离合器又重新恢复脱开状态。
3.2 离合器控制逻辑电路
控制电路逻辑图,如图3所示。离合器的吸排是根据驾驶人员的控制要求来动作的。当驾驶台操作离合器操作手柄要求离合器吸合时,操作手柄會发出离合器吸合请求信号(cl-en-rq=1),相反,操作手柄会发出离合器脱开请求信号(cl-dis-rq=1)。
离合器吸合还应满足转速上的限制要求,该功能由转速检测逻辑比较电路来实现的。转速检测逻辑比较电路是由(pre-cl-en-h-rpm)和(pre-cl-en-l-rpm)两个逻辑比较模块组成的,作用是禁止离合器在主机高转速时或低转速时吸合,只有主机转速在允许离合器吸合转速范围内才能使离合器操作手柄发讯,离合器吸合指令(cl-en=1)有效。若主机转速不在限制范围内,激活booster功能,使主机转速跟随预定义转速,从而使转速位于限制范围内。当booster功能时间到或离合器吸合,booster将撤销。
离合器的吸排过程还附加有时间延时环节。离合器吸合延时环节(cl-en-dly)和离合器脱开延时环节(cl-dis-dly) 。该环节主要作用是消除操作手柄装置的误操作。
当同时满足上述三条件,即有操作指令、满足离合器吸合时转速限制和延时环节,离合器就进入吸合时序程序。首先,在控制离合器吸合操作电磁阀Y5得电之前,Y30电磁阀通电,将缓冲器接入通向离合器控制油进口管路。缓冲器在接入管路之前,Y30是失电状态,二位换向阀左位通,缓冲器内液压油在预冲的3bar压力空气的作用下回油箱。其次,在控制电磁Y30通电时刻开始计时(cl-en-w-t=0),设定时间为1s,计时时间未到,控制离合器吸合操作电磁阀Y5仍保持失电状态。最后,当计时时间到达时(cl-en-w-t=1),控制离合器吸合操作电磁阀Y5通电,二位换向阀左位通,控制离合器液压油经二位换向阀从控制油进口进入密封腔。由于缓冲器接入管路,控制离合器液压油压力将降低,加上缓冲器内的弹性气室作用,控制离合器液压油的压力升高过程是缓变得的。从而保证了离合器的吸合过程实现打滑目的,避免发生冲击现象。
值得注意的是,Y30通电将缓冲器接入管路,使得控制离合器液压油压力降低过程(cl-pres-c)。该过程是由(low-pres-t)延时环节和(cl-act)离合器吸合状态反馈环节两个部分组成。当离合器吸合,反馈环节(cl-act=1)时,即使在延时期间内,延时时间设定为4s(low-pres-t=1),(cl-pres-c=0)终止控制离合器液压油压力降低过程,即Y30断电,切除缓冲器作用。若在延时环节计时到达时(low-pres-t=0),即使离合器状态反馈环节(cl-act=0),也同样终止控制离合器液压油压力降低过程,切除缓冲器作用。该环节控制过程正确动作不仅关系到离合器吸合过程的平稳性,而且关系到离合器响应的快速性。
3.3 电源部分
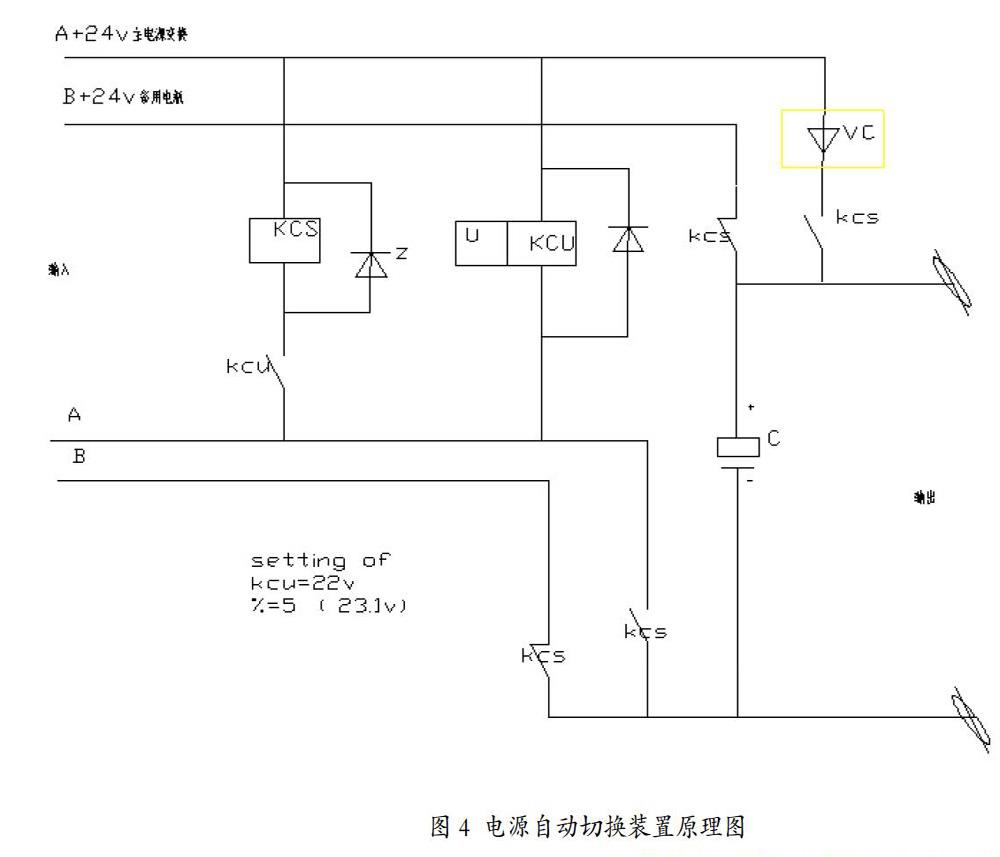
正是由于“消拖2号”轮的离合器与舵桨为一体,且其控制系统与舵桨的控制系统是一体,由同一电源供电。为了保证离合器可靠工作,还得对舵桨的电源部分加以分析。通常为了舵桨供电安全考虑,舵桨装置一般都采用两路独立电源供电,其中一路为常用电源(380v电网电压经变压镇流滤波获得的24v直流电),另一路为备用电源(蓄电池24v电),两路电源的切换控制由双电源切换装置完成。电源自动切换装置原理图,如图4所示。
双电源自动切换装置由具有电源监测和执行元件监控功能的控制器以及执行元件组成,主要功能是最大限度地保证供电的连续性。该转换装置核心控制器就是KCU。KCU是根据电源电压值动作的继电器,设定值为22v,幅差为5%。当主电源电压值在KCU设定的范围值内时,KCU继电器动作,其常开触头闭合,继电器KCS通电,常开触头闭合,常闭触头断开,从而系统由主电源供电。若主电源电压值低于KCU设定最低允许值(20.9v)时,KCU继电器常开触头断开,KCS继电器不通电,常开触头断开,常闭触头闭合,系统由备用电源供电。
在双电源自动转换过程中,KCS继电器触头动作会有不同时间上的延时或不同步。在此期间,电容C放电,保持系统不间断供电。电容C同时也起到保证系统供电电压的稳定性。二极管Vc的作用是保证电流的单向流通性,实现在主电源失电时,电容C的电压不会经Vc向主电源电路放电而迅速下降。
4 常见故障分析
“消拖2号”轮常见的故障是离合器吸合过程不平稳,发生冲击现象。下面将分析导致离合器吸合过程不平稳,发生冲击的原因。
在前面的离合器控制逻辑电路中已经提到过,离合器吸合一方面要满足转速限制条件,避免在高转速下吸合防止发生冲击;另一方面在离合器吸合过程中,缓冲器接入管路,控制离合器液压油压力有一个压力降低过程,加上缓冲器内的弹性气室作用,控制离合器液压油的压力升高过程是缓变的,从而保证了离合器的吸合过程实现打滑目的,也避免发生冲击现象。按照通常情况操作离合器吸合不应出现冲击现象,但实际工作过程中冲击却频繁出现。我们根据离合器控制逻辑电路的控制原理可知,离合器吸合过程不平稳,发生冲击的根本原因是在离合器吸合过程中压力降低过程时间过短或者吸合过程中根本没压力降低过程。而导致压力降低过程时间过短或者根本没压力降低过程的原因,不外乎是控制环节或执行环节出现故障。
4.1 控制环节故障
根据离合器控制逻辑电路可知,在正常操作离合器吸合时可决定离合器液压油压力降过程有两个环节,即(low-pres-t)延时环节和(cl-act)离合器吸合状态反馈环节。(low-pres-t)延时环节是由控制系统内的单片机(cpu)程序计数完成,若是单片机出现故障就不单单只是离合器吸合会出现冲击现象,其他的转舵和车速控制都会出现故障,故排除。(cl-act)离合器吸合状态反馈环节是由SP4压力继电器来完成的。当离合器控制油压力达到设定压力值15MP时,SP4压力继电器触头闭合,表示离合器已吸合(cl-act=1)。若是SP4压力继电器的设定值不正确,远低于15MP时,当离合器控制油压力还不到15MP,離合器其实还没真正吸合就反馈回去(cl-act=1)。(cl-act=1)一方面切除缓冲器,另一方面使得主机转速跟随油门手柄设定转速而提高。正是由此,就会导致离合器真正吸合过程发生冲击现象。另外也应注意,即使SP4继电器在出厂时设定正确,但因连续使用较长,设定弹簧的弹性系数会变小,也会出现设定值下降,从而导致离合器吸合也发生冲击情况。一般遇到因此原因导致离合器吸合出现冲击情况时,可以调高SP4设定值予以消除。
4.2 执行环节故障
控制离合器液压油压力降低过程(cl-pres-c)执行环节就是Y30电磁换向阀。当控制环节来信号控制Y30通电,Y30一通电就应该将缓冲器接入到管路。若是Y30由于某些原因未能正确动作,离合器液压油压力降低过程就不能够得以实现,离合器在吸合时就会冲击。能够导致电磁换向阀Y30故障,有三个原因。一是电磁换向阀内的阀芯脏污卡阻;二是电磁线圈烧毁或供电线路故障;三是电磁阀的供电电源出现故障。前面两个原因都好理解,对于第三原因,应加以注意和分析。由于舵桨装置采用两路独立电源供电,其中一路为常用电源,另一路为备用电源,两路电源的切换控制由双电源切换装置完成。下面我们分别从切换装置和整流电源加以分析。
切换装置。若是切换装置核心控制器KCU设定值不正确,当主电路电源输出电压低,不能及时切换到备用电源,在此切换期间进行离合器操作将导致执行机构不能正确动作引起离合器吸合过程发生冲击;同样,若是切换装置中的蓄能电容C容量变小或是二极管Vc反向导通,即使核心控制器KCU设定值,当主电路电源输出电压低时,由于KCU和KCS两继电器的各个触头动作存在时间误差,就不能够保证在双电源自动切换过程的供电品质保证,也将导致执行机构不能正确动作引起离合器吸合过程发生冲击。
整流电源。主电路电源常见的故障就是整流电桥中的二极管出现反向截止能力下降或是击穿。电桥电路中的二极管出现反向截止能力下降或是击穿,不仅会使输出电压下降,还使得电源的带负载能力下降。根据前面可知在离合器吸合时序程序期间,控制单元在控制离合器吸合操作电磁阀Y5得电之前是先控制Y30电磁阀通电。若此时Y30通电即相当于系统投入的负载增加,电源输出电压将会降低,将导致Y30电磁阀不能够正确动作,又因为控制系统的核心cpu供电电压为5v,所以并不影响控制系统的运行。同时电压降低到KCU设定动作值时,KCU自动转换到备用电源。由于在控制Y30通电信号下达后1s就发送控制Y5通电信号,此时可能就会出现Y5和Y30电磁阀同时供电,逻辑控制时序不正常,离合器吸合会出现冲击。
查阅“消拖2号”轮自2001年建造至今舵桨的维修保养记录,做一统计,如表1所示。
可以清楚地看到,在实际工作当中,遇到离合器吸合发生冲击现象处理方法通常也就是调整或换新SP4继电器、更换KCU和换新整流桥路二极管。这又论证了上述的分析结论。
5 管理措施
5.1加强对电源管理
定期对整流电路上的电桥二极管进行测量,对反向电阻低于10 的二极管应及时换新;同时应对整流电路进行除尘散热工作,保证电路元件的工作环境适合要求。对备用电瓶也做好日常的維护保养。定期对自动切换装置进行效用,特别是对KCU的设定值应进行校验。对KCU及KCS各继电器的抽头进行检查。对大电容C和二极管Vc也定期进行检测。定期对线路,接头等紧固件进行检查。
5.2加强对SP4压力继电器的管理
定期对SP4设定值进行校验。在实际具体操作可能比较困难,SP4继电器管理难度比较大,可对其进行改造。可由金属应变式压力传感器、MAX197A/D转换芯片、STC89C51单片机、HD7279A接口芯片和数码管组成的测量显示反馈一体的控制单元同时对两台舵桨实施控制。金属应变式压力传感器线性好,可靠性高,使用寿命也高。不仅可以实现SP4继电器国产化,而且保证了系统的可靠性,同时由于单片机的使用,可以方便、灵活地调整和功能校验,减少了管理工作。
5.3加强润滑油的管理
定期对润滑油进行化验,保证滑油品质,确保设备可靠润滑。同时对滤器也要加强监管,主要是对滤器压差传感器加强维护,保证可靠工作,对滤器工作状态实时监控。出现压差高或过低时应对滤器进行检查,出现脏污或破损时应及时更换,为阀件工作的可靠性提供保障。
5.4阀件的管理
主要是对控制端的电磁阀定期检查。测量电磁阀的线圈电阻;检查电磁阀的铁芯磨损情况;检查电磁阀动作的灵活和可靠性。
6 结束语
离合器吸合时发生冲击后果是相当严重的,不仅会造成离合器摩擦片磨损严重,减少离合器的寿命,而且由摩擦片磨损后的磨粒带来的后果更加严重。磨粒一方面会加快润滑油脏污、氧化,对设备管理带来难度,另一方面会脏污电磁换向阀,导致换向阀芯卡阻从而影响离合器正常动作,就可能对生产作业带来安全隐患。更主要的是,磨粒还会造成舵桨其他机械的磨损,降低舵桨的寿命。因此,我们必须采取有效措施,避免离合器发生冲击。
参考文献:
[1] 朱树文. 船舶动力装置原理与设计[M]. 国防工业出版社, 1980.
[2] 齐冬. 港口全回转拖轮应用及其舵桨装置研究[D]. 大连海事大学, 2012.
猜你喜欢
科学与财富(2020年29期)2020-12-21
小资CHIC!ELEGANCE(2019年29期)2019-09-12
人民交通(2019年4期)2019-03-27
阅读与作文(英语初中版)(2018年10期)2018-12-21
中小企业管理与科技·上旬刊(2016年11期)2016-11-28
科技视界(2016年18期)2016-11-03
科学与财富(2016年28期)2016-10-14
中学生英语高效课堂探究(2008年10期)2008-11-19